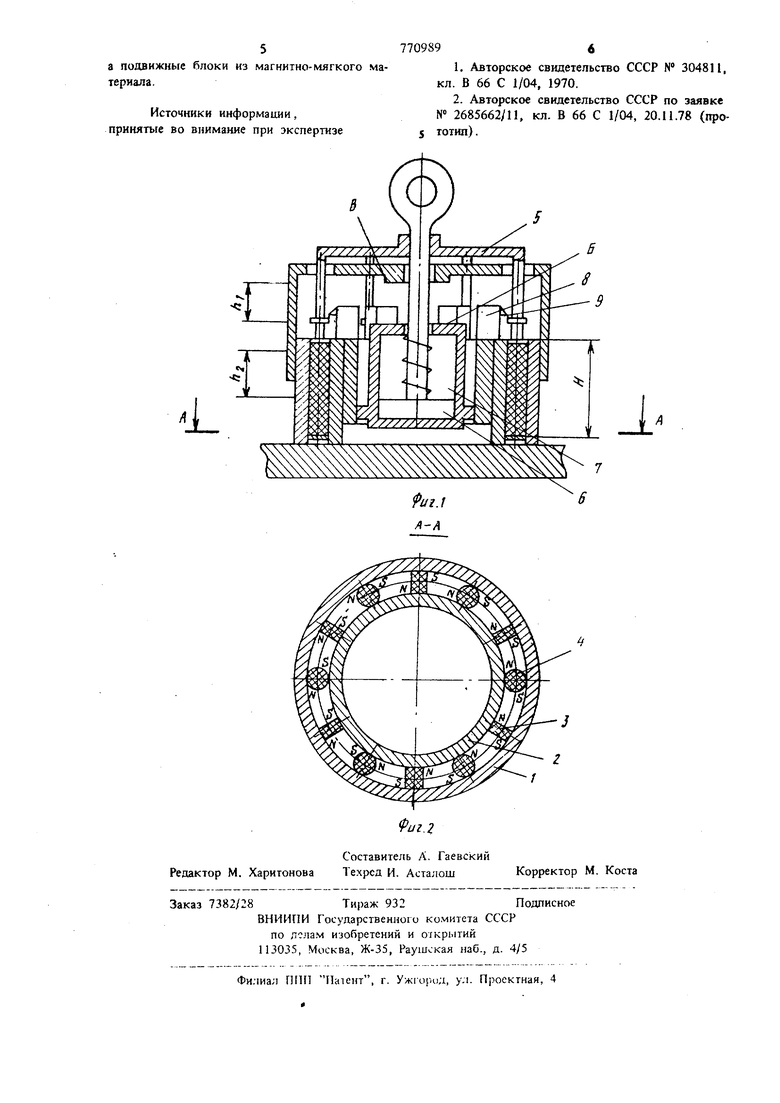
Изобретение относится к области грузоподъемных устройств с магнитными захватами и .может быть использовано при подъеме нетарнрованных грузов. Известен магнитный захват, содержащий кор пус с устан(5вленными в ием подвижным и неподвижным ма1:иитными блоками и механизмом управления замыканием и размыканием магнитного потока (1. В подвижной относительно корпуса захвата крюковой подвеске установлена взводимая под действием веса захвата пружина. На подвеске неподвижно закреп лена зубчатая рейка, входящая в зацепление с шестерней, снабженной осью для крепления собачки храпового механизма и установленной свободно на храповом валике, на концах кото рого расположены кривошипы, связанные тягами с зубчатым сектором, приводящим в движение подвижный мaгнитньtй блок с помощью укрепленной на нем зубчатой рейки. Недостатком казанного устройства является отсутствие . элементов, обеспечиваюихих безопасность при подъеме нетарнрованных грузов и повышение надежности в работе. Известен также автоматический магнитный захват, содержаишй корпус с установленными в нем подвижными и неподвижными магнитными блоками, механизм управления замыканием и размыканием магнитного потока и соединенную с подвижными магнитными блоками пружинный демпфер, шток которого имеет серьгу для навешивания на крюк крана 2, Этот магнит имеет сложную конструкцию, так как механизм управления замыканием и размыканием магнитного потока «го содержит большое количество вращающихся деталей, что вызвано горизонтальным расположением подвижных и неподвижных блоков, соориентированных разнополярно, а их взаимное перемещение для замыкания и размыкания MartfflTHoго потока осуществляется путем поворота подвижных блоков относительно горизонтальной оси. Целью изобретения является упрощение конструкции захвата и повышение надежности его работы. Поставленная цель достигается тем, что корпус предлагаемого захвата выполнен в виде двух вертикальных концентрически расположенных цилиндров, между стенками которых в чередующейся последовательности расположены блоки подвижных и неподвижных магнитов, а демпфер выполнен регулируемым, а неподвижные и подвижные магнитные блоки выполнены из керамических магнитов. Неподвижные магнитные блоки могут быть выполнены из литых постоянных магнитов, а подвижные блоки из магнитно-мягкого материала. На фиг. 1 показан предлагаемый захват, вид спереди, разрез по подвижным магнитным блокам; на фиг. 2 - то же, разрез А-А на фиг. 1. Захват состоит из корпуса, выполненного в виде двух концентрических полых цилиндров 1 и 2, между которыми по высоте закреплены однополярно несколько, например, шесть неподвижных, равнорасположенных магнитных блоков 3 с высотой Н, чередующихся с аналогично расположенными и равными им по высоте, но сориентированными по отношению к ним разнополярно подвижными блоками 4, имеющими возможность вертикального перемещения относительно корпуса. Подвижная относительно корпуса магнитного захвата подвеска 5 соединена с подвижными блоками 4.Внутри подвески расположены демпфер 6 и возвратная пружина 7. В корпусе установлен взаимодействующий с подвеской 5 механизм замыкашш и размыкания магнитного потока, имеющи подвижные упоры 9. Автоматический магнитный захват работает следующим образом. Магнитный захват устанавливается на поверх ность транспортируемого груза. В исходном положении магнитная система захвата нейтрали зована. При подъеме крюка грузоподъемного устройства подвижные упоры 9 убраны, и начи нают движение подвеска 5 и соединенные с нею подвижные магнитные блоки 4. Блоки 4 выдвигаются на заданную высоту hj, меньшую чем полная высота .блоков 4 до упора плоскос ти Б подвески 5 в плоскость В корпуса. При этом через груз замыкается магнитный поток, составляющий заданную часть максимального магнитного потока, который может быть обеспечен при подъеме подвижных блоков 4 на высоту, равную высоте Н магнитных блоков. Подъем груза начинается при пониженном магнитном потоке. По достижении подвеской 5 упорной плоскости В корпуса демпфером 6 осуществляется выдержка времени для подъем нетарированного груза на безопасную высоту. За время демпфирования подвижные магнитны блоки 4 поднимаются на высоту hj. При зтом соблюдается зависимость Н h, hj и обеспечивается прохождение полного рабочего магитного потока через поднимаемый груз. Тем амым создается заданный, например двухчетырехкратный запас надежности при транспортировке нетарированного груза. Регулировка величины запаса надежности осуществляется изменением соотношения величин hi к h. При постановке груза по оконча1таи транспортировки под действием веса по;шески 5, возвратной пружины 7 и магнитного поля подвижные магнитные блоки 4 втягиваются в корпус. Происходит полная нейтрализация магнитной системы. При последующем подъеме захвата подвижные магнитные блоки 4 механизмом 8 замыкания и размыкания магнитного потока удерживаются в крайнем нижнем положении. Магнитная система отключена. Происходит подъем магнитного захвата без груза. При установке подъемника на груз механизмы 8 срабатывают и разблокируют подвижные блоки 4. Цикл повторяется. Применение предлагаемого магнитного захвата для подъема и транспортировки нетарированных грузов позволяет обеспечить гарантированный запас надежности и безопасность при работе с захватом; создать экономию рабочего времени на строповку груза. Формула изобретения 1.Автоматический магнитный захват, содержащий корпус с установленными в нем подвиж ными и неподвижными магнитными блоками, механизм управления замыканием и размыканием магнитного потока и соединенную с подвижными магнитными блоками пружинный демпфер, щток которого имеет серьгу для навешивания на крюк крана, отличающийс я тем, что, с целью упрощения конструкции, корпус выполнен в виде двух вертикальных концентрически расположенных цилиндров, между стенками которых в чередующейся последовательности расположены блоки подвижных и неподвижных магнитов, а демпфер выполнен регулируемым. 2.Магнитный захват поп. l,oтличaю щ и и с я тем, что, с целью повышения надежности работы, неподвижные и подвижные магнитные блоки выполнены из керамических магнитов. 3.Магнитный захват, отличающий с я тем, что неподвижные магнитные блоки выполнены из питых постоянных магнитов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический магнитный захват Быченко | 1980 |
|
SU933602A1 |
| Магнитный захват | 1978 |
|
SU770988A1 |
| Магнитный захват | 1980 |
|
SU903276A1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1763341A1 |
| Магнитное грузозахватное устройство | 1975 |
|
SU821379A1 |
| Грузозахватное устройство | 1986 |
|
SU1402533A1 |
| МАГНИТНЫЙ ЗАХВАТ | 1971 |
|
SU304811A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Магнитное грузозахватное устройство | 1988 |
|
SU1601065A1 |
| Грузозахватная траверса | 1986 |
|
SU1409567A1 |
