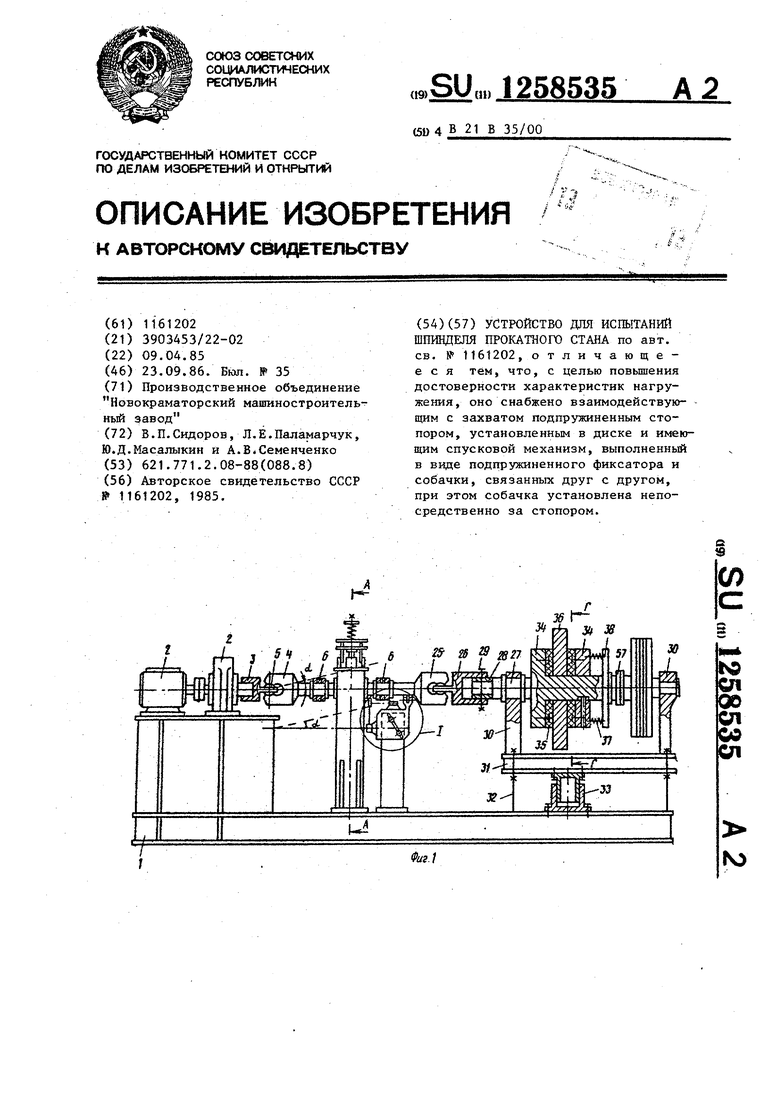
Изобретение относится к прокатному производству, касается испытательных устройств прокатных станов, в частности шпинделей главных приводов рабочих клетей, наиболее эффективно может быть применево при отработке конструкции и исследования влияния динамических нагрузок на шпиндельные соединения и является усовершенствованием устройства по авт.ев, № 1161202.
Цель изобретения - повышение достоверности характеристик нагруже- ния путем исключения наложения усилий, возникаюпц{Х при прижатии и скольжении захвата, связанного с Имитаторами нагрузки, по диску фрикционного нагружателя.
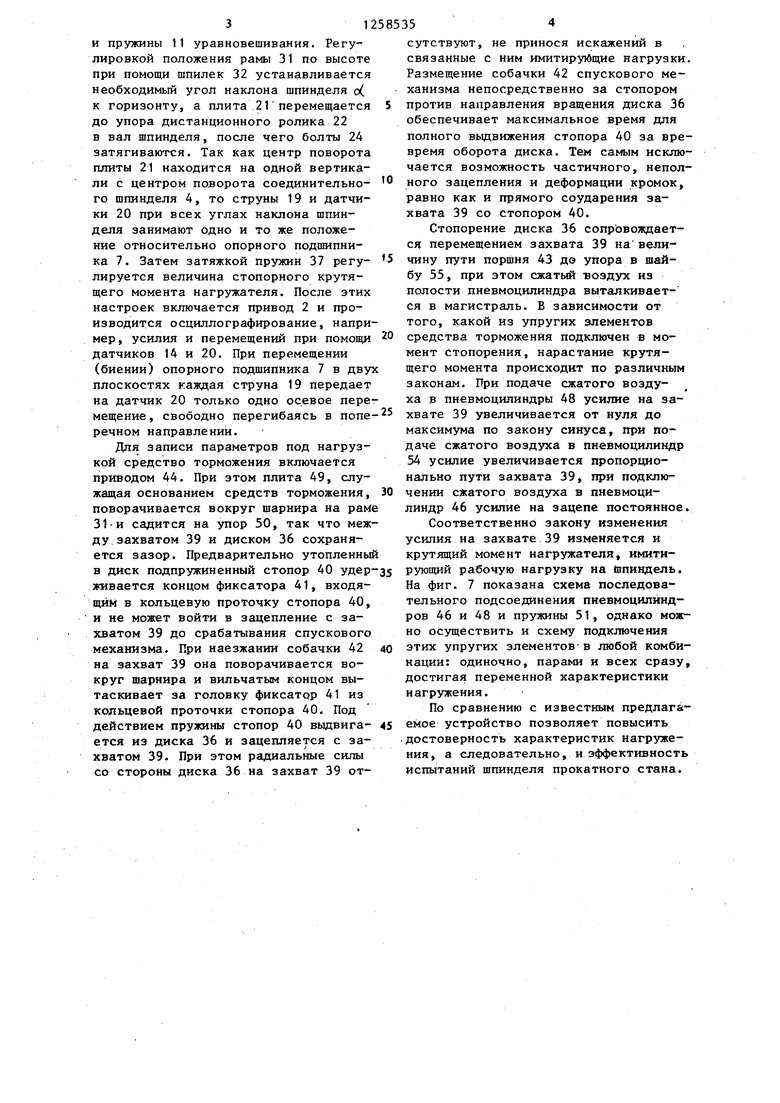
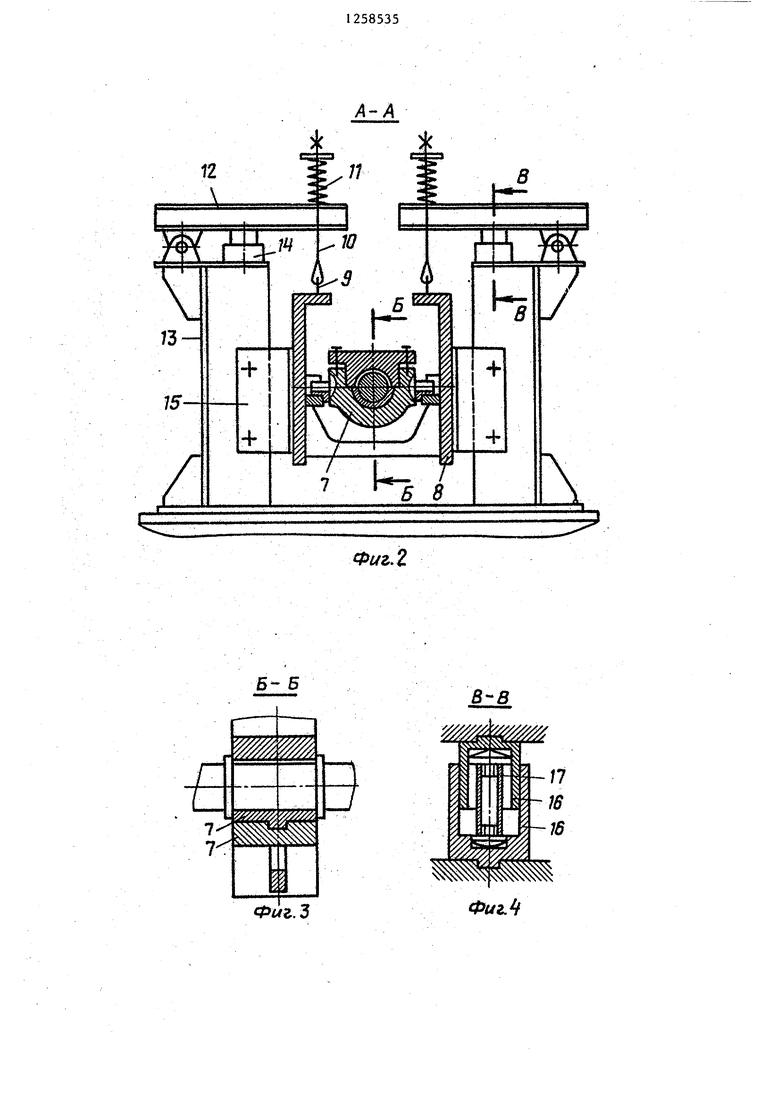
На фиг.1 показано устройство, общий вид; на фиг. 2 - разрез А-А на. фиг. 1; на фиг. 3.- разрез Б-Б на фиг.2; на фиг.4 - разрез. В-Б на фиг. 2; на фиг. 5 - узел I на фиг. 1; на фиг. 6 - раьрез Г-Г на фиг.1;; на фиг.7 - разрез Д-Д на фиг.6; на фиг.8 - разрез Е-Е на фиг. 7; на фиг. 9 - узел диска со стопором и захват, разрез.
Устройство смонтировано на осно- ван1ш 1, при этом привод 2 с регулируемой скоростью вращения через муфту 3 с плоским хвостовиком соединен с ведущей головкой шпинделя 4 а вкладьш 5 выполняется с различными размерами для имитации износа в шарнире и ускорения испыталий.
На валу шпинделя установл:ены съемные секционные маховые массы 6 для изменения момента инерции шпинделя. Для уравновешивания шпинделя используется опорньш подшипник 7, цапфы которого расположены в гнездах подвески 8, coeдIiнeннoй через серьги 9 и тяги 10 с пружинами 11, которые опираются на рычаги 12. Последние шарнирно соединены со стойками 13. Между рычагами и стойками расположены датчики 14 усилия, а на стойках установлены регулируемые направляющи 15 подвески 8. Датчики усилия выпол- Heiai в виде стаканов 16, внутри которых расположен тензозлемент 17.
С опорными подшипниками 7 через планку 18 связаны две упругие струны
19из пружинной стали, которые, в свою очередь, связаны с датчиками
20пути, установленными на плите 21, имегацей дистанционный ролик 22, упирающийся в тело шщ1нделя. Плита 21 крепится на стойке 23 болтами 24. Ведомая головка 25 шпинделясоединена с муфтой 26, которая посажена на
валу 27 через втулку 28 и от взаим ного проворота застопорена штырем 29. Опоры 30 вала 27 крепятся на раме 31, связанной с основанием 1 при помощи шпилек 32 и направляющей 33.
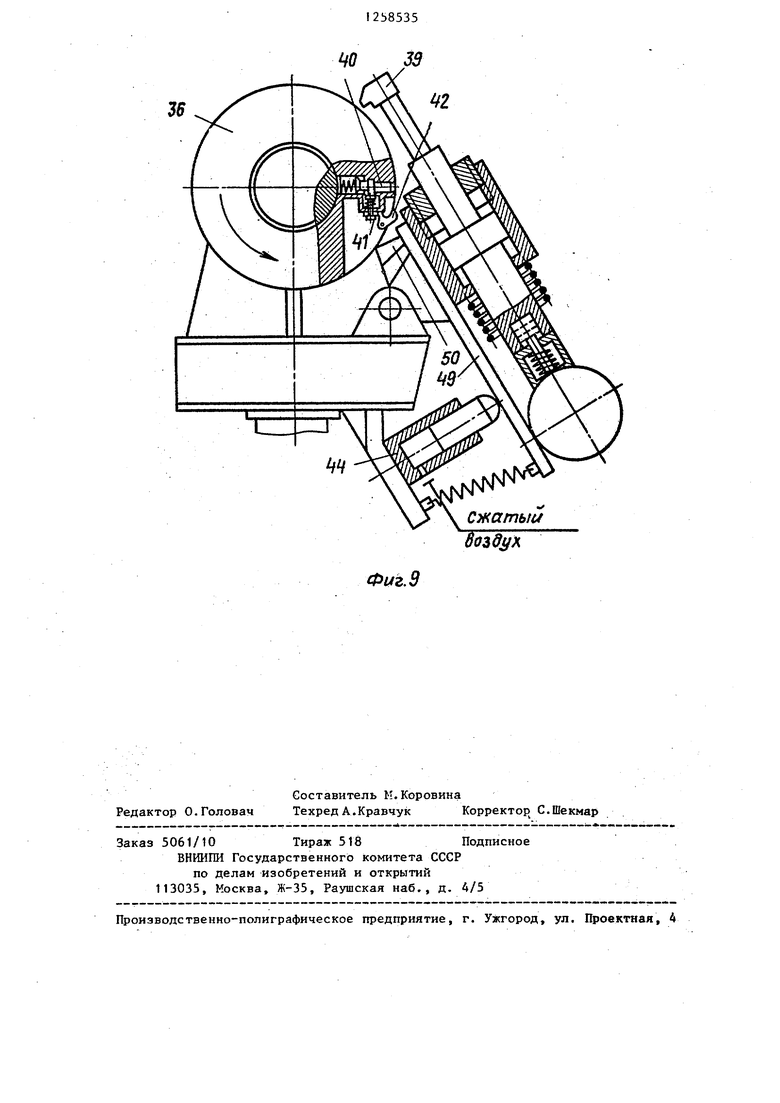
Вал 27 жестко связан со средством нагружения шпинделя, выполненным в виде фрикционного нагружателя, который имеет диски 34 с фрикционными накладками 35. Диски 34 жестко устанбвлены относительно вала 27, а диск 36 шарнирно установлен на валу 27, при этом диски 34 и 36 сжаты пружинами 37, упирающимися в шайбу 38. Диск 36 взаимодействует с захватом 39
посредством подпружиненного стопора
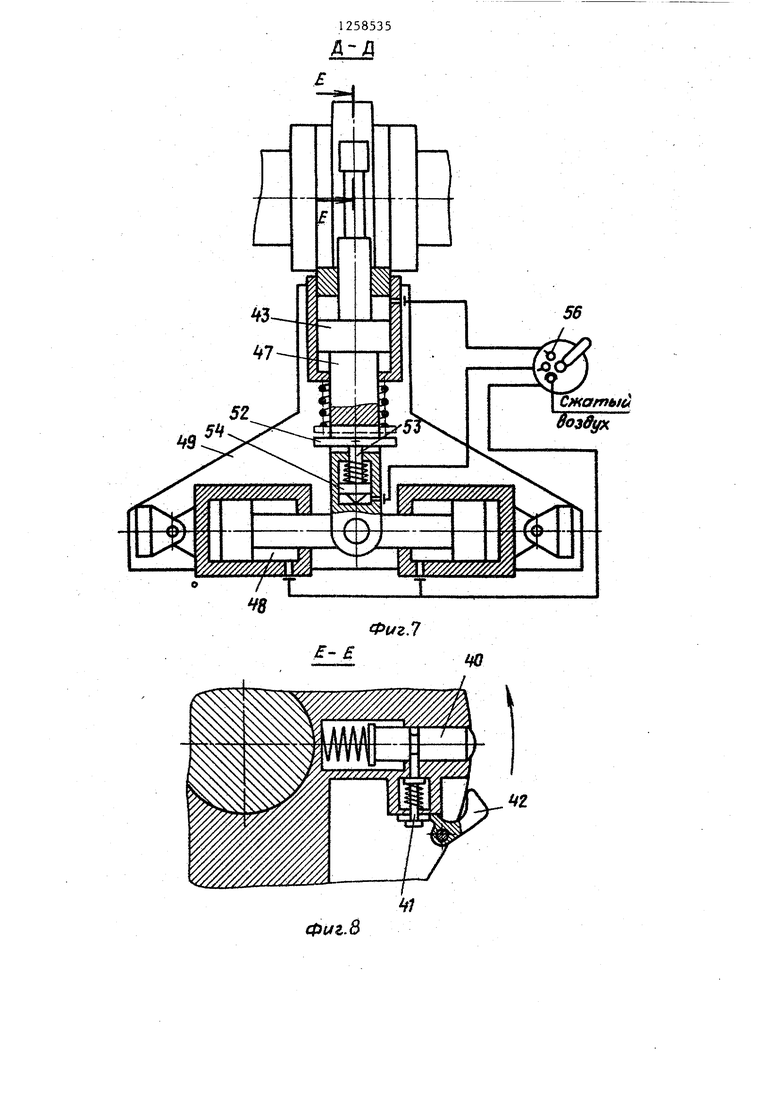
40, снабженного спусковьм механизмом с подпружиненным фиксатором 41 и шарнирно установленной собачкой 42, размещенных в проеме диска. Захват 39 соединен со средством торможения с поршнем 43, которое шарнирно подвешено на раме 31 и имеет привод 44 включения и возвратную пружину 45. Захват 39 связан с пневмоцилиндром 46,
а поршень 47 шарнирно связан со спаренными пневмоцилиндрами 48, шарнирно подвешенными на плите 49, служащей основанием средства торможения. Поворот плиты 49 ограничен упором 50,
установленным на раме 31. На хвостовике поршня 47 установлена пружина 51, расположенная меязду корпусом пневмоцйлиндр1а 46 и планкой 52, связанной с плунжером 53 пневмоцилиндром 54. Для регулирования величины хода захвата 39 и поршня 47 служит шайба 55.
Пневмоцилиндры 46, 48 и 54 трубопроводами связаны с воздухораспределителем 56, с помощью которого можно последовательно сообщать цилиндры с магистралью Сжатого воздуха.
На валу 27, конструктивно выполненном из двух частей, связанных муфтой, размещены дополнительные маховые массы 57.
Устройство работает следукщим образом.
Перед включением устройства согласно программе испытаний устанавливается соответствующее число секций маховых масс 6 и 57, определенные типоразмеры вкладьш1ей 5, втулкк 28
и пружины 11 уравновешивания. Регулировкой положения рамы 31 по высоте при помощи шпилек 32 устанавливается необходимый угол наклона шпинделя о( к горизонту, а плита 21 перемещается до упора дистанционного ролика 22 в вал шпинделя, после чего болты 24 затягиваются. Так как центр поворота плиты 21 находится на одной вертикали с центром поворота соединительного шпинделя 4, то струны 19 и датчики 20 при всех углах наклона шпинделя занимают одно и то же положение относительно опорного подшипника 7. Затем затяжкой пружин 37 регулируется величина стопорного крутящего момента нагружателя. После этих настроек включается привод 2 и производится осциллографирование, например , усилия и перемещений при помощи датчиков 14 и 20. При перемещении (биении) опорного подшипника 7 в двух плоскостях каждая струна 19 передает на датчик 20 только одно осевое перемещение, свободно перегибаясь в попе речном направлении.
Для записи параметров под нагрузкой средство торможения включается приводом 44. При этом плита 49, служащая основанием средств торможения, поворачивается вокруг шарнира на раме 31-и садится на упор 50, так что между захватом 39 и диском 36 сохраняется зазор. Предварительно утопленньй
.в диск подпружиненный стопор 40 удер-35 рующий рабочую нагрузку на шпиндель.
живается концом фиксатора 41, входящим в кольцевую проточку стопора 40, и не может войти в зацепление с захватом 39 до срабатывания спускового механизма. При наезжании собачки 42 на захват 39 она поворачивается вокруг шарнира и вильчатым концом вытаскивает за головку фиксатор 41 из кольцевой проточки стопора 40. Под действием пружины стопор 40 вьщвига- ется из диска 36 и зацепляется с захватом 39. При этом радиальные силы со стороны диска 36 на захват 39 от10
15
30
20
25
сутствуют, не принося искажений в связанные с ним имитирующие нагрузки. Размещение собачки 42 спускового механизма непосредственно за стопором против направления вращения диска 36 обеспечивает максимальное время для полного выдвижения стопора 40 за вре- время оборота диска. Тем самым исключается возможность частичного, неполного зацепления и деформации кромок, равно как и прямого соударения захвата 39 со стопором 40.
Стопорение диска 36 сопровождается перемещением захвата 39 на величину пути поршня 43 до упора в шайбу 55, при этом сжатый воздух из полости пневмоцилиндра выталкивает- ся в магистраль. В зависимости от того, какой из упругих элементов средства торможения подключен в момент стопорения, нарастание крутящего момента происходит по различным законам. При подаче сжатого воздуха в пневмоцилиндры 48 усилие на захвате 39 увеличивается от нуля до максимума по закону синуса, при подаче сжатого воздуха в пневмоцилиндр 54 усилие увеличивается пропорционально пути захвата 39, при подключении сЛатого воздуха в пневмоцилиндр 46 усилие на зацепе постоянное.
Соответственно закону изменения усилия на захвате 39 изменяется и крутящий момент нагружателя, имитиНа фиг. 7 показана схема последовательного подсоединения пневмоцилйнд- ров 46 и 48 и пружины 51, однако можно осуществить и схему подключения этих упругих элементов в любой комбинации: одиночно, парами и всех сразу, достигая переменной характеристики иагружения.
По сравнению с известным предлагаемое устройство позволяет повысить достоверность характеристик нагруже- ния, а следовательно, и эффективность испытаний шпинделя прокатного стана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытаний шпинделя прокатного стана | 1983 |
|
SU1161202A1 |
| ПРИВОД ВЕРТИКАЛЬНЫХ ВАЛКОВ ПРОКАТНОЙ КЛЕТИ | 2005 |
|
RU2281821C1 |
| ВЕРТИКАЛЬНАЯ ПРОКАТНАЯ КЛЕТЬ | 2005 |
|
RU2277985C1 |
| Устройство для испытания шпинделей прокатного стана | 1987 |
|
SU1458043A1 |
| Станок для изготовления электрических катушек | 1985 |
|
SU1348921A1 |
| Захватное устройство | 1984 |
|
SU1224238A1 |
| Винтовой пресс | 1985 |
|
SU1263539A1 |
| Винтовой пресс | 1983 |
|
SU1177173A1 |
| МУФТА | 2008 |
|
RU2357128C1 |
| Устройство для подачи листов в валки прокатного стана | 1935 |
|
SU51375A1 |
Фиг.2
Б- Б
Фиг.З
В-В
.
Фиг.
a го Л поворота
илпиндел
23
Фиг. 5
г-г
39
омД/л
Фиг.б
5
(И
003
Ф«/г.7
-
Ф1/1.8
6o3dt/x
Редактор О.Головач
Составитель М.Коровина
Техред А.Кравчук Корректор С.Шекмар
Заказ 5061/10 Тираж 518Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
.9
| Устройство для испытаний шпинделя прокатного стана | 1983 |
|
SU1161202A1 |
