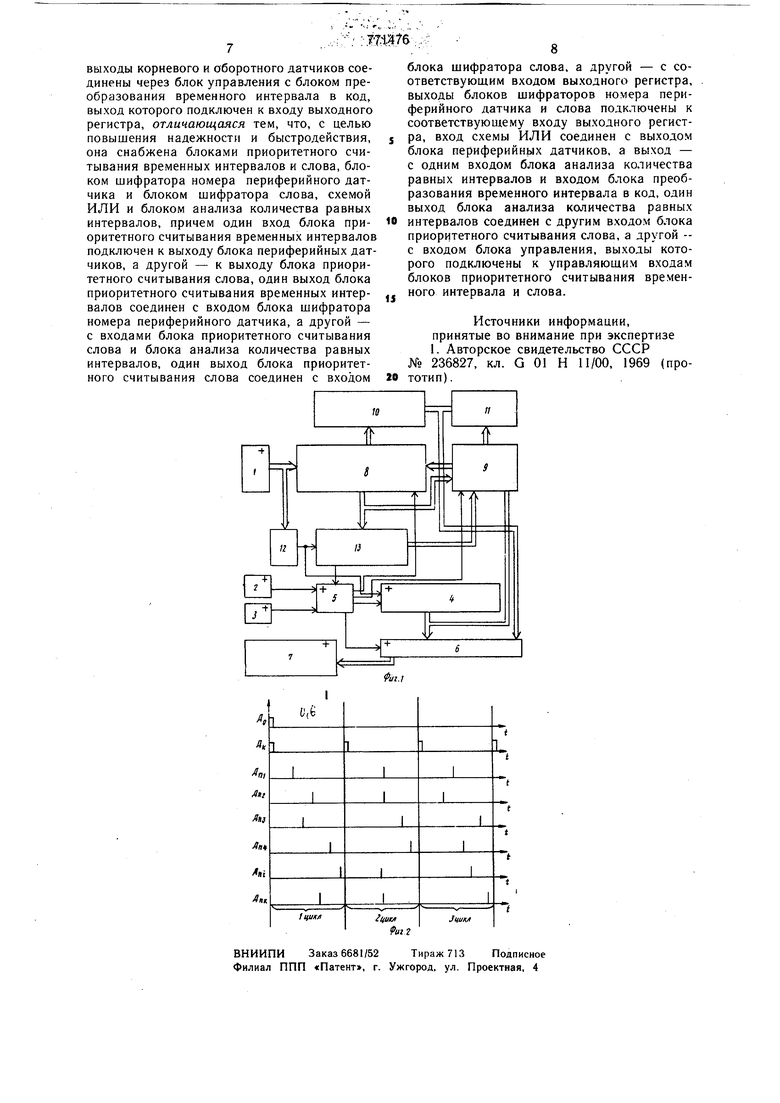
ных интервалов соединен с другим входом блока приоритетного считывания слова; а другой - с входом блока управления, выходы которого подключены к управляющим входам блоков приоритетного считывания временного интервала и слова. На фиг. 1 изображена блок-схема автоматизированной системы для исследования вибраций лопаток турбомашины; на фиг. 2 - временная диаграмма ее работы. Автоматизированная система для исследования вибраций лопаток турбомашины содержит блок периферийных датчиков 1, оборотный 2 и корневой 3 датчики, соединенные с блоком 4 преобразования временного интервала в код, блоком 5 управления. Выходной регистр 6 соединен с входом электронной вычислительной машины 7, а вход регистра 6 - с выходом блока 4 преобразования временного интервала в код. Дополнительно автоматизированная система снабжена блоком 8 приоритетного считывания временных интервалов, блоком 9 приоритетного считывания слова, блоком 10 шифратора номера периферийного датчика, блоком 1 1 шифратора слова, схемой 12 ИЛИ и блоком 13 анализа количества равных интервалов. Один вход блока 8 приоритетного считывания временных интервалов подключен к выходу блока периферийных датчиков 1, а другой - к выходу блока 9 приоритетного считывания слова. Один выход блока 8 приоритетного считывания временных интервалов соединенС входом блока 10 П1ифратора номера периферийного датчика, а другой - с входами блока 9 приоритетного считывания слова и блока 13 анализа количества равных интервалов. Один выход блока 9 приоритетного считывания слова соединен с входом блока 11 шифратора слова, а другой - с соответствующим входом выходного регистра 6. Выходы блоков 10 и 11 шифраторов номера периферийного датчика и слова подключены к соответствующему входу выходного регистра 6. Вход схемы ИЛИ соединен с выходом блока периферийных датчиков 1, а выход - с одним входом блока 13 анализа количества равных интервалов и входом блока 4 преобразования временного интервала в код. Один выход блока 13 анализа количества равных интервалов соединен с другим входом блока 9 приоритетного считывания слова, а другой - с входом блока 5 управления, выходы которого подключены к управляющим входам блоков 8 и 9 приоритетного считывания временного интервала и слова. Все блоки системы могут быть выполнены на микросхеме любой степени интеграции. Функционирование системы начинается с момента прихода импульсов с оборотного 2 и корневого 3 датчикоз на входы блока 5 управления. В этот момент первая лопатка будет находиться в секторе действия первого периферийного датчика, вторая лопатка - второго датчика и так далее до последней лопатки и датчика. С этого момента блок 5 управления разрешает прохождение стабильной частоты на вход блока 4 преобразования временного интервала в код и счетчик начинает отсчет временного интервала одновременно для всех периферийных датчиков. Другие блоки системы включаются в работу только с приходом импульсов с периферийных датчиков. Поскольку моменты прохода концов лопаток мимо соответствующих датчиков во времени (фиг. 1) располагаются случайным образом, так как зависят от пространственного положения колеблющихся концов лопаток, то импульсы с выходов датчиков 1 приходят на вход блока приоритетного считывания вре.менных интервалов случайным образом, либо пос.тедовательно, либо параллельно, либо то и другое в.месте. Рассмотрим работу системы в режимах последовательного и параллельного прихода импульсов. Допустим, что с выходов датчиков 1 на вход блока 8 и.мпульсы, свидетельствующие об окончании временных интервалов для соответствующих лопаток, приходят последовательно во времени. Первый импульс с любого датчика 1 фиксируется в блоке 8 и, пройдя через схему 12 ИЛИ, поступает на вход блока 13 анализа количества равных интервалов и блок 4. В результате информационный код, соответствующий вре.менному интервалу лопатки, первой прощедшей мимо датчика 1, считывается из блока 4 и заносится в выходной регистр 6. В это время блок 13 анализа количества равных интервалов по информации о количестве равных интервалов, находящейся в блоках 8 и 9, вырабатывает импульс в блок управления 5 и в работу включаются блоки 8 и 10. В блоке 8 подачей импульса опроса из блока управления считывается прежде зафиксированный сигнал блока периферийных датчиков, который, пройдя на вход блока 10 шифратора номера периферийного датчика, формирует код, соответствующий сработавщему датчику, и передает его в выходной регистр 6. В результате в выходном регистре 6 формируется код из двух частей: кода, пропорционального временному интервалу, и кода номера датчика 1, формирующего данный временной интервал. После этого информация передается в ЭВМ 7 для дальнейщей обработки. С приходом следующего сигнала с любого из датчиков 1 на вход блоков 8, 12 и 4 период работы системы повторяется. При этом будет сформирован в выходном регистре 6 код, пропорциональный временному интервалу сработавшего датчика 1, и его адрес. Цикл работы системы закончится с приходом последнего импульса с датчиков 1 и передачи сформированного кода в ЭВМ 7. Следующий цикл работы систе.мы начинается с момента прихода импульса с корневого датчика 3 на вход блока управления 5 и разрешения прохождения стабильной частоты на вход блока 4. В этом цикле первая лопатка будет находиться в секторе действия второго периферийного датчика Дп, вторая лопатка - в секторе третьего и т. д. до последней лопатки, которая будет в секторе первого датчика 1. Блок 4 преобразования временного интервала в код начинает формирование кода и до прихода импульсов с датчиков 1 другие блоки системы не участвуют в раб,оте. Допустим, что одновременно сработали датчики Дп, Дп4. Дп1 и Длх- Импульсы датчиков фиксируются в блоке 8 приоритетного считывания, а в регистре приоритета блока 9 приоритетного считывания слова фиксируется информация о наличии сигналов с датчиков Дп. В данном случае сигналы с датчиков Дп и Дп4 принадлежат к первому слову регистра блоков, сигналы с датчиков Дп и Д. - К i-му и к-му словам. Поэтому в блоке 9 соответствующие разряды регистра приоритета будут установлены в единичное состояние. Кроме того, с приходом сигналов с датчиков Д п в выходной регистр 6 будет занесен код, пропорциональный временному интервалу, одновременно для четырех датчиков. Затем после прихода сигнала из блока 13 в блок управления 5, последний выдает импульсы опроса в блок 9 приоритетного считывания слова, а в ЭВМ передается информационный код из регистра 6. Первым импульсом опроса считывается первое слово из блока 8, адрес слова из блока 1 шифратора слова в выходной регистр 6 и далее в ЭВМ, а соответствующее слово блока 8 обнуляется. Вторым импульсом опроса датчика Дпс считывается слово с адресом, третьим импульсом датчика Дпк - слово. В результате в ЭВМ 7 будет занесен код, пропорциональный временному интервалу датчиков Дц адреса и слова, в которых были зафиксированы сигналы с датчиков Д. Дальнейшая расшифровка слов и присвоение временного интервала соответствующим датчикам осуществляется в ЭВМ по специальной программе. С приходом другой серии сигналов Дп на вход блока 8 систе.ма будет работать аналогично предыдуще.му случаю. После срабатывания последнего во времени датчика Дп система переходит к третьему циклу, в котором будут зафиксированы все адреса и временные интервалы, оканчивающиеся последовательно, параллельно или последовательно-параллельно. После полного оборота первой лопатки, последняя вновь появится в секторе действия первого датчика Дд. При наличии инфор.мации всех датчиков в циклах и начала циклов нетрудно выделить в ЭВМ информацию о поведении отдельных лопаток в процессе вращения. Следует отметить, что интервал опроса блоков приоритетного считывания должен быть выбран таким, чтобы не вносить искажений в информационные интервалы при считывании. Кроме того, блок 13 анализа количества равных интервалов в зависимости от доцустимых погрешностей и скорости передачи информации в ЭВМ 7 может быть настроен на определенное количество параллельно поступающих и.мпульсов с периферийных датчиков 1 так, что при нескольких одновре.менно поступивщих сигналов Д будет подключаться блок 8, а не блок 9, что позволит осуществить наиболее гибкое управление при съеме информации. Особенностью работы системы в режимах параллельного и последовательного приема импульсов с периферийных датчиков 1 является то, что в первом случае вначале в ЭВМ 7 передается код из блока преобразования временных интервалов, а затем заносятся слова регистра приоритета блока 8 приоритетного считывания временных интервалов, приче.м в ЭВМ 7 передаются с соответствующими адресами те байты, в которых были зафиксированы импульсы с периферийных датчиков 1. Это позволяет значительно увеличить быстродействие системы. Так если слово содержит 8 или 16 разрядов, то максимально быстродействие может быть увеличено в 8 или 16 раз при параллельном срабатывании датчиков. Во втором случае блок приоритетного считывания слова в работу не включается и в ЭВМ 7 передается код блока 4 преобразования временного интервала и номер сработавщего датчика 1 Др. В функции ЭВМ 7 по расшифровке и упорядочению информации, кроме указанных, входит анализ слова, в котором места единиц слева направо указывают на номера одновременно сработавших датчиков. Таким образом, система позволяет при наличии преобразователя временного интервала в код с одни.м счетчиком осуществлять фиксирование множества параллельных временных интервалов, что существенно сокращает количество электронных элементов и повыщает быстродействие. Формула изобретения Автоматизированная система для исслеования вибраций лопаток турбомашины, одержащая блок периферийных датчиков, боротный и корневой датчики, блок преобазования временного интервала в код, блок правления, выходной регистр и электроную вычислительную машину, вход которой оединен с выходом выходного регистра, а
выходы корневого и оборотного датчиков соединены через блок управления с блоком преобразования временного интервала в код, выход которого подключен к входу выходного регистра, отличающаяся тем, что, с целью повышения надежности и быстродействия, она снабжена блоками приоритетного считывания временных интервалов и слова, блоком шифратора номера периферийного датчика и блоком шифратора слова, схемой ИЛИ и блоком анализа количества равных интервалов, причем один вход блока приоритетного считывания временных интервалов подключен к выходу блока периферийных датчиков, а другой - к выходу блока приоритетного считывания слова, один выход блока приоритетного считывания временных интервалов соединен с входом блока шифратора номера периферийного датчика, а другой - с входами блока приоритетного считывания слова и блока анализа количества равных интервалов, один выход блока приоритетного считывания слова соединен с входом
блока шифратора слова, а другой - с соответствующим входом выходного регистра, выходы блоков шифраторов номера периферийного датчика и слова подключены к соответствующему входу выходного регистра, вход схемы ИЛИ соединен с выходом блока периферийных датчиков, а выход - с одним входом блока анализа количества равных интервалов и входом блока преобразования временного интервала в код, один выход блока анализа количества равных
интервалов соединен с другим входом блока приоритетного считывания слова, а другой -с входом блока управления, выходы которого подключены к управляющим входам блоков приоритетного считывания временного интервала и слова.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 236827, кл. G 01 Н 11/00, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН | 2000 |
|
RU2189567C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2207523C1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| Устройство для ввода-вывода информации | 1984 |
|
SU1246103A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584723C1 |
| Устройство для синхронной передачи двоичной информации | 1976 |
|
SU693418A1 |
| Селектор импульсов по длительности | 1981 |
|
SU945973A2 |
| Устройство внешних каналов | 1988 |
|
SU1695313A1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ДАННЫХ МЕЖДУ ПЕРИФЕРИЙНЫМИ УСТРОЙСТВАМИ И ГЛАВНЫМ БЛОКОМ | 1992 |
|
RU2113764C1 |
| СИГНАЛИЗАТОР ПРЕДАВАРИЙНЫХ ДЕФОРМАЦИЙ ЛОПАТОК ТУРБОМАШИН | 2000 |
|
RU2177145C1 |
ч
Яп}
