Изобретение относится к станкостроению и может быть использовано в металлорежущих станках с автоматической сменой инструментов.
Известно устройство для автоматической смены инструментов, содержащее инструментальный магазин и поступательно перемещающийся от щпинделя станка к инструментальному магазину манипулятор с двухзахватной поворотной на валу рукой 1 .
Недостатками известного технического рещения являются значительные затраты времени на процесс позиционирования, а также возможность неточного позиционирования, приводящая к отказу в работе устройства и его поломке.
Цель изобретения - повыщение производительности и надежности работы станка.
Указанная цель достигается тем, что устройство снабжено установленным на щпинделе станка кулачком, а двухзахватная поворотная рука манипулятора подпружинена на валу и установлена с возможностью перемещения по нему и взаимодействия с упомянутым кулачком.
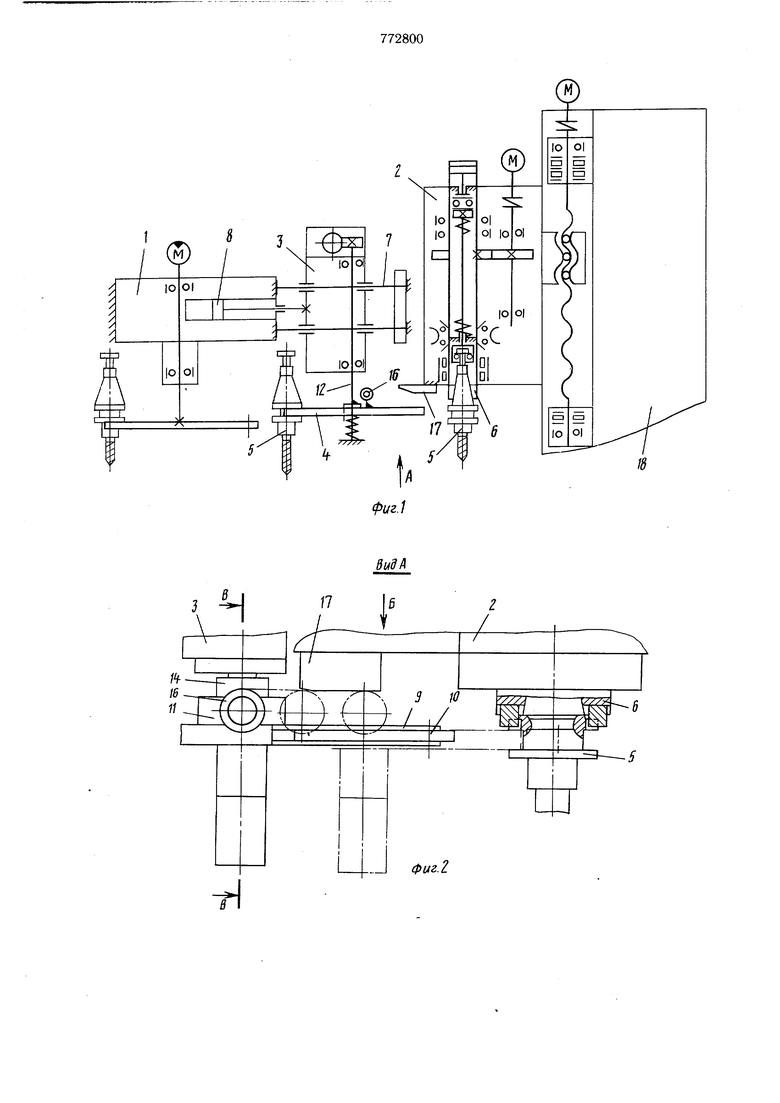
На фиг. 1 показана кинематическая схема устройства смены инструментов металлорежущего станка; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 разрез В-В на фиг. 2.
Устройство смены инструментов металлорежущего станка состоит из инструментального магазина 1, инструментальной головки 2 и манипулятора 3 с двухзахватной поворотной рукой 4. Манипулятор служит для переноса инструментальных оправок 5 из
10 инструментального магазина 1 в щпиндель 6 инструментальной головки 2. Манипулятор 3 смонтирован на двух направляющих 7 и связан с гидроцилиндром поступательного перемещения 8. Двухзахватная поворотная 15 рука 4 представляет собой плиту 9 с двумя симметрично расположенными захватами 10 для инструментальных оправок 5. Плита 9 прикреплена к фланцу 11, имеющему шлицевое отверстие для вала 12 манипулятора 3. Двухзахватная поворотная рука подпружинена относительно вала 12 в осевом направлении пружиной 13 и прижата к жесткому упору 14. Во фланце 11 жестко закреплены две оси 15 с роликами 16. На нижней плоскости инструментальной головки 2 закреплен кулак 17. На инструментальной головке 2 закреплены также кулачки, взаимодействующие с конечными выключателями, установленными на колонне 18 (на чертеже не показаны). Устройство работает следующим образом Кулак 17 при сборке подгоняется по высоте так, чтобы при контакте ролика 16 с горизонтальным участком кулака 17 плита 9 двухзахватной поворотной руки 4 попадала в паз инструментальной оправки 5, установленной в щпинделе 6. В процессе обработки заготовки манипулятора 3 с двухзахватной поворотной рукой 4 и очередной инструментальной оправкой 5 находится в промежуточной позиции (фиг. 1 При получении команды о смене инструментов инструментальная головка 2 начинает перемещаться вверх в позицию смены инструментов. Кулачок, установленный на инструментальной головке 2, воздействуя на конечный выключатель (на чертеже не показан), установленный на колонне 18, дает команду на перемещение манипулятора 3 с двухзахватной поворотной рукой 4 в сторону инструментальной головки 2 раньше, чем последняя остановится в позиции смены инструментов. При перемещении манипулятора 3 с двухзахватной поворотной рукой 4 в сторону инструментальной головки 2 ролик 16 вначале контактирует с наклонной поверхностью кулака 17, а затем выезжает на его горизонтальный участок (фиг. 2). При этом двухзахватная поворотная рука 4 опускается вниз, сжимая пружину 13. Между фланцем 11 двухзахватной поворотной руки 4 и жестким упором 14 образуется зазор. После выхода ролика 16 на горизонтальный участок кулака 17 плита 9 двухзахватной поворотной руки 4 начинает входить в паз инструментальной оправки 5, и в дальнейщем двухзахватная поворотная рука 4 совершает одновременно два движения: по горизонтали, пока плита 9 двухзахватной поворотной руки 4 полностью не войдет в паз инструментальной оправки 5, и по вертикали вместе с инструментальной головкой 2, пока последняя не остановится в позиции смены инструментов. После этого инструментальная головка 2 перемещается вверх, освобождая инструментальную оправку 5, которая остается лежать на плите 9 двухзахватной поворотной руки 4. После поворота двухзахватной поворотной руки 4 на 180° инструментальная головка 2 опускается на новую инструментальную оправку 5. При этом допускается быстрое позиционирование инструментальной головки 2, т.е. неточная остановка ее в позиции смены инструментов, так как кулак 17 нажимает на ролик 16 и опускает двухзахватную поворотную руку 4 вниз, сжимая пружину 13. Это предохраняет элементы двухзахватной поворотной руки 4 от поломки. Формула изобретения Устройство для автоматической смены инструментов металлорежущего станка, содержащее инструментальный магазин и поступательно перемещающийся от шпинделя станка к инструментальному магазину манипулятор с двухзахватной поворотной на валу рукой, отличающееся тем, что, с целью повышения производительности и надежности работы станка, устройство снабжено установленным на щпинделе станка кулачком, а двухзахватная рука манипулятора подпружинена на валу и установлена с возможностью перемещения по нему и взаимодействия с упомянутым кулачком. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 656803, кл. В 23 Q 3/155, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструментов | 1978 |
|
SU768597A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство для автоматической смены инструментов | 1980 |
|
SU865601A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Устройство для автоматическойСМЕНы иНСТРуМЕНТОВ HA МЕТАллО-РЕжущЕМ CTAHKE | 1978 |
|
SU852163A3 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство автоматической смены инструмента | 1982 |
|
SU1142253A1 |
| Станок с устройством автоматической смены инструмента | 1987 |
|
SU1472209A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |