Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления робототехнологическими комплексами, входящими в состав поточных линий.
. Цель изобретения - повышение производительности и надежн;ости устройства.
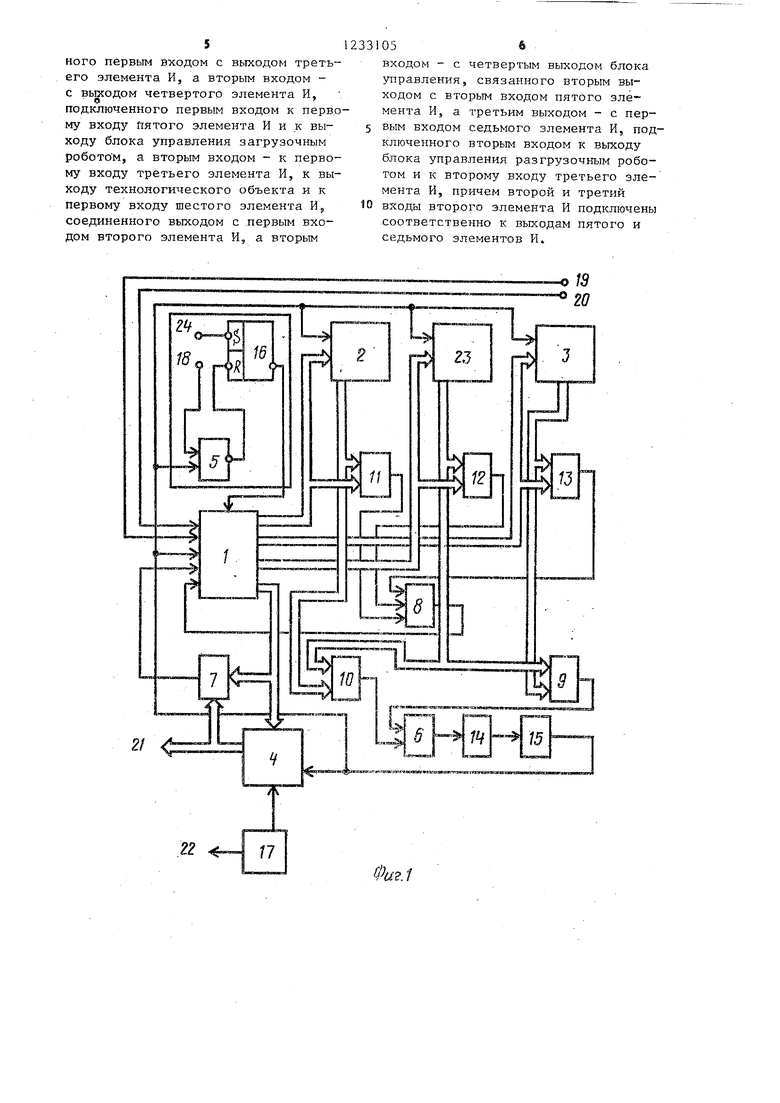
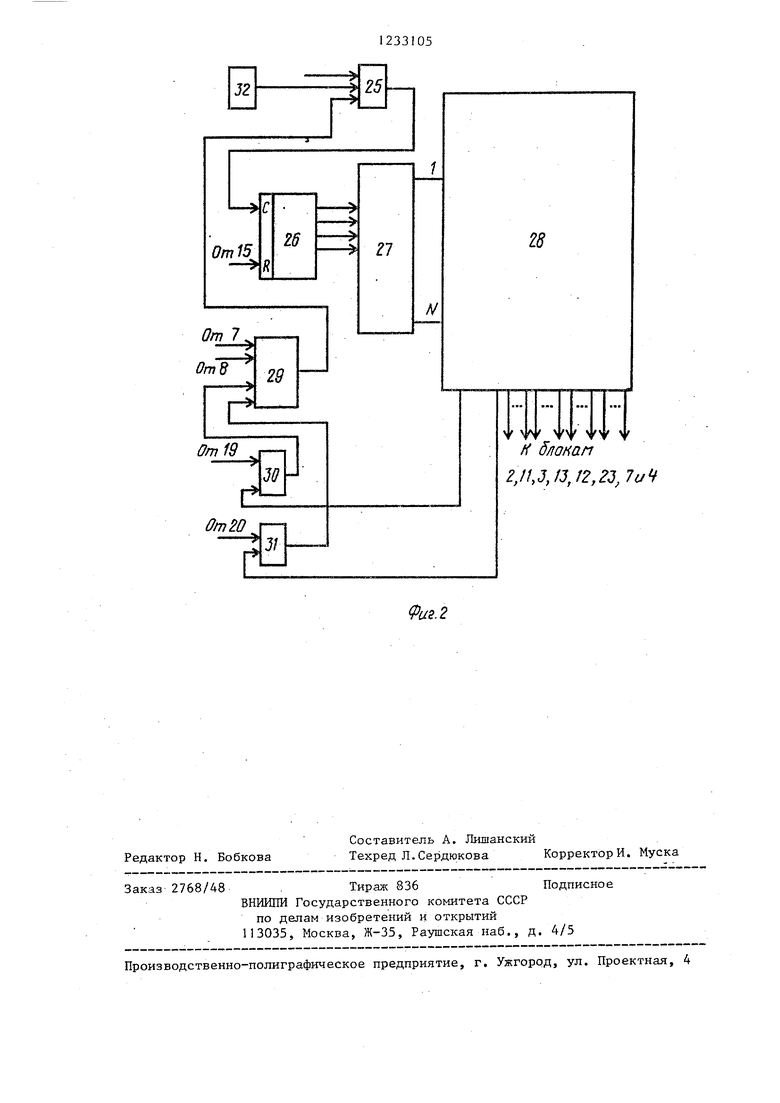
На фиг, представлена блок-схема устройства; на фиг. 2 - блок-схема блока управления.
Устройство содержит (фиг, 1) блок 1 управления, блок 2 управления заг- рузочным роботом, блок 3 управления разгрузочным роботом, блок 4 управления транспортным роботом, первый 5 и второй 6 элементы ШШ, первый , второй 8, третий 9, четвертьш 10, пятьй 11, шестой 12 и седьмой 13 элементы И, элемент 14 задержки, формирователь 15 импульсов, триггер 16, Р.атчик 17 наличия детали, вход Стоп 18, вход Готовность транспортного , робота 19, вход Робот загрулсен .20, выход Готовность транспортного робота 21э выход Робот загружен 22, технологический объект 23, вход Пуск 24, Бпок 1 управления содержит (фиг,2 восьмой элемент И 25, счетчик 26, дешифратор 27, программную диодную; матрицу 28, девятый 29,- десятьй 30 и одинадцатый 31 элементы И, тактовый генератор 32,
Устройство работает следующим образом.
Устройство предназначено для работы как в составе агрегата из нескольких устройств, объединенных в автома тическ то линию, так и в качестве одиночного устройства, В первом случае связь отдельными устройствами осуществляется, по входам и выходам 19 - 22.
Перед началом работы оператор задает условия работы комплекса набором соответствуюп1,ей рабочей программы на Диодной матрице 28,
При включении питания формирователь 15 импульсов вырабатывает импульс, параметры которого определяются элементом 14 задержки, у станав- лийалощий через элемент ИЛИ 5 триггер 16-и блоки 1 - 4 управления в .исходное состояние.
При работе в качестве одиночного устройства блок 4 управления тра.н10
спортным роботом отключен или отсутствует. При этом датчик 17 Наличия детали выдает сигнал о готовности загрузочного устройства дать очеред- 5 пую деталь. К входу 20 устройства подключен датчик (не показан), контролирующий разгрузку комплекса.
После подачи сигнала Пуск по входу триггер 16 устанавливается в единичное положение, высокий уровень с выхода которого поступает на второй вход блока 1 управления и далее на первый вход элемента И 25 (фиг,2), на второй вход последнего поступают сигналы от тактового генератора 32, а на третий вход сигнал Задание выполнено от элемента И 29, При совпадении трех сигналов в счетчике 26 добавляется единица, которая воз- 2f бу«дает следующую шину дешифратора 27, иначе, сигнал несопадения не позволяет перейти на следующий шаг. Из диодной матрицы 28 выдается управляющая информация, соответствующая за- Данию оператора. Эта информация поступает на соответствующие входы блоков 2 и 3 управления и технологичес- кого объекта 23, а также на входы элементов 1 - 13 И, Для достиже- 30 НИН макскма.л.ьной производительности загрузочный и разгрузочньп роботы начинают отрабатывать заданные условия, Одновременно информация от блоков 2 и 3 управления поступает 35 соответствующие входы элементов II и 13, где сравнивается с информацией о функционировании устройства, поступающей от блока 1 управления По выполнении текутдего за- ,W Дания на выходах элементов И 11 и 13 по.чвл.чштся сигналы, которые посту- па.я } a входы элемента И 8 и далее на четвертый вход блока 1 управления При совпадении сигналов счет- 45 чик 25 выдает задание на следующий гааг программы.
По окончании работы загрузочного и разгрузочного роботов от блока 1 управления на технологический объект
23 поступает информация о задании, выполнение которого контролируется элементом И 12, По окончании работы технологического объекта 23 блок 1 управления контролирует сигнал на
5 входе 19 устройства от датчика, про- вер.яющего разгрузку комплекса.
При функционировании технологического объекта 23 информация о его
состоянии поятупает на входы элементов И 9.и 10, на другие входы которых поступает информация о состоянии загрузочного и разгрузочного роботов.
При нахождении рабочих органов загрузочного и разгрузочного роботов в зоне действия технологического объекта 23 и его срабатывании элементы И 9 и 10 вырабатывают сигнал, которьн через элемент ИЛИ 6 и эле- 14 задержки запускает формирователь 15 импульсов, возвращающий устройство в исходное состояние, что равносильно убеганию рабо- чих органов из опасной зоны.
При работе устройства в составе автоматической линии в качестве первой ячейки вход 20 соединяется с выходом 22 последующей ячейки линии, а вход 19 - с соответствующим выходом 21, Работа устройства протекает аналогично описанному, за исключением того, что цикл работы разгрузочного робота начинается только тогда, когда имеется сигнал на входе устройства , свидетельствующий об исходно положении транспортного робота следующей ячейки. После выгрузки на входе 20 появляется сигнал, разрешающий начать новьм цикл работы данного комплекса. Контроль зтого сигнала исключает одновременное попадание двух деталей в зону работы технологического объекта 23, что может вызвать поломку оборудования.
При работе устройства в составе .автоматической линии в качестве средней ячейки новый цикл начинается только при наличии сигнала на. входе-. 20 об установке на транспортном роботе следующей ячейки только что снятой детали и после срабатывания датчика 17 наличия детали, которое свидетельствует о том, что транспортный робот данной ячейки загружен новой деталью. Далее для получения максимальной производительности одновременно отрабатывают задание транспортный робот и технологический t объект 23. В то же время загрузочный робот начинает загружать новую деталь а разт рузочный - выбирать уже готовую. При этом транспортньй робот данной ячейки возвращается в исходное положение. При работе устройства в качестве замыкающей ячейки ли- , НИИ на входе 19 постоянно присутству
ет сигнал, поскольку отсутствует следующий транспортный робот.
Таким образом, производительность устройства повьшается благодаря одновременному выполнению операций загрузки-разгрузки роботов, а надежность - проверкой фактического выполнения всех операций, предусмотренных шагом программы.
Формула изобретения
0
Устройство для управления робототехнологическим комплексом, содержа- 5 щее триггер, подключенный S-входом к входу Пуск устройства, R-BXO- дом - к выходу первого элемента ИЛР1, связанного первым входом с входом Стоп устройства, а вторым входом - 2Q с первым управляющим входом блока управления и с первыми заправляющими входами блока управления загрузочным роботом, блока управления разгрузочным роботом, и блока управлепия 5 транспортным роботом, соединенного вторым управляющим входом с первым выходом датчика наличия детали, подключенного вторым выходом к выходу Робот загружен, устройства, связанного выходом Готовность транспортного робота с первым входом г ервого элемента И и с выходом блока управ-; лепия транспортиь -- роботом, соединенного третьим управляюпц м входом с вторым входом первого элемента И 5 и с.первым выходом блока управления, подключенного вторым управлякощим входом к выходу трип ера, третьим зшрав- ляющим входом - к выходу второго элемента И, пятым и шестым управляющими входами - соответствепно- к выходам устройства Готовность транспортного робота и Робот загружен, а вторым, третьим и четвертым выходами - соответственно к вторым управляюш;им входам блока управления загрузочным роботом и технологического объекта, отличающееся тем, что, с целью повьаиения производительности и надежности устройства, в него ввег- дены второй элемент ИЛИ, третий, четвертый, пятьй, шестой и седьмой элементы И, элемент задержки и формирователь импульсов, подключенньш выходом к первому управляющему входу - блока управления транспортным роботом, а входом - к выходу элемента задержки, связанного входом с выходом второго элемента ИЛИ, соединен0
5
0
кого первым входом с выходом третьего элемента И, а вторым входом с выходом четвертого элемента И,
о подключенного первым входом к первр
му входу Пятого элемента И и к выходу блока управления загрузочным робото м, а вторым входом - к первому входу третьего элемента И, к выходу технологического объекта и к первому входу шестого элемента И, соединенного выходом с первым входом второго элемента И, а вторым
12331056
входом - с четвертым выходом блока управления, связанного вторым выходом с вторым входом пятого эле- мента И, а третьим выходом - с пер- 5 вым входом седьмого элемента И, подключенного вторым входом к выходу блока управления разгрузочным роботом и к второму входу третьего элемента И, причем второй и третий 10 входы второго элемента И подключены .соответственно к выходам пятого и седьмого элементов И.
21
гг
О 13
Фи2.1
15
26
R
-
- -
27
28
у W
/i блакап
ШШ W
2,П,3,П,12,2:5,7аЧ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления робототехнологическим комплексом | 1980 |
|
SU911464A1 |
| Устройство для циклового программного управления | 1982 |
|
SU1084738A1 |
| Система для управления робототехнологическим комплексом | 1987 |
|
SU1413599A1 |
| Устройство для циклового программного управления | 1979 |
|
SU773573A1 |
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| Устройство для программного управления виброзагрузочным бункером | 1985 |
|
SU1283713A1 |
| Автоматическая линия закалки деталей | 1981 |
|
SU1041584A1 |
| Устройство для перемещения контейнеров от автоматических линий на стационарный склад | 1983 |
|
SU1276594A1 |
| Устройство для формирования координат траекторий движения объектов | 1988 |
|
SU1721625A1 |
| Система управления гибким производственным комплексом | 1987 |
|
SU1513417A1 |
Изобретение относится к автома - тике и вычислительной технике и может быть использовано для управления робототехнологическими комплексами, входящими в состав поточных линий. Цель изобретения - повьшение произ- . водительности и надежности устройства. Устройство содержит блок управления, блок управления загрузочным роботом, блок управления разгрузочным роботом, два элемента ИЛИ, семь элементов И, элемент задержки, формирователь импульсов, триггер, датчик наличия детали. Введение элемента ИЛИ, пяти элементов И, элемента задержки и формирователя импульсов позволяет достичь повьшения производительности устройства за счет возможности одновременного выполнения операций загрузки-разгрузки роботов, а надежности - за счет проверки фактического выполнения всех операций, предусмотренных шагом программы. 2 ил. I (Л ю 00 со
Редактор Н. Бобкова
Составитель А. Лишанский
Техред Л.Сердюкова КорректорИ. Муска
Заказ 2768/48 . Тиралс 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Обмен опытом в радиопромышленности | |||
| Вып | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
| Устройство для управления робото-технологическим комплексом | 1978 |
|
SU930254A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
