(54) ПОЗИЦИОНШЙ ПРИВОД
а следовательно, связано с повышенными затратами времени на позиционирование.
Цель изобретения - увели-чение быстродействия привода.
Цель достигается тем, что позиционный привод содержит корректирующий блок, соответствующие входы которого связаны с выходом цифроаналогового преобразователя и выходом тахогенератора, а выход - с управляющим входом усилителя с регулируемым коэффициентом усиления.
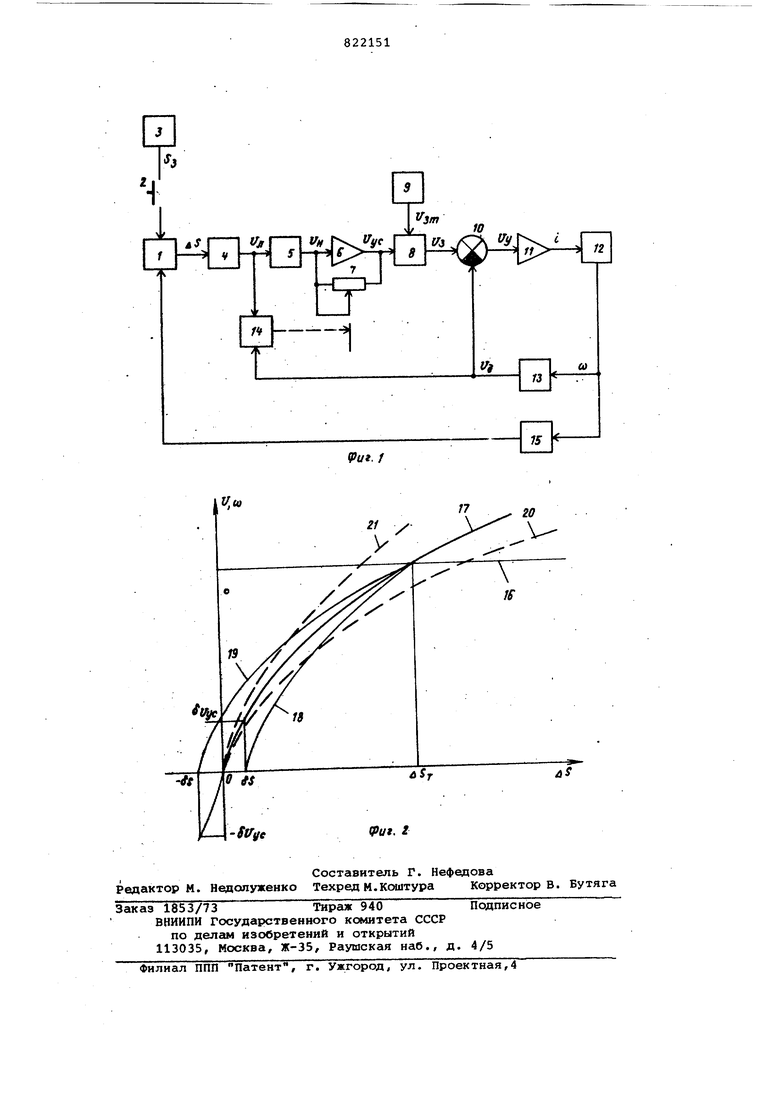
На фиг. 1 изображена функциональная схема привода; на фиг. 2 графики зависимости некоторых параметров привода от остатка пути перемещения.
Функциональная схема привода ((иг. 1 содержит счетчик 1 импульсов, ключ 2, задатчик 3 пути позиционирования цифроаналоговый преобразователь 4, функциональный нелинейный преобразователь 5, усилитель 6 с регулируемым коэффициентом усиления, регулятор 7 коэффициента усиления, задатчик 8 скорости двигателя с ограничителем 9 максимальной скорости , элемент 10 сравнения, усилитель 11 мощности, двигатель 12, тахогенерат-ор 13, корректирующий блок 14. Механически связанный с двигателем 12, датчик 15 импульсов перемещения включен на счетный вход счетчика 1 импульсов .
Привод работает следующим образом.
Содержащееся в счетчике импульсов 1 число дЗ поступает на вход цифроаналогового преобразователя 4, оторый преобразует его в линейно зависимое от л S напряжения Уд . Функциональный нелинейный преобразователь 5 преобразует напряжение Уд в нелинейно зависимое от него напря жение и. Характер нелинейной зависимости определен из условия оптиМсшьного по быстродействию торможения привода, например, из условия 4 const, где W - угловая скорость , Напряжение U,, поступает на вход усилителя б с регулируемым коэффициентом усиления, на выходе которого напряжение 11 k U,, где К коэффициент усиления, определяемый положением регулятора 7 коэффициента усиления. Напряжение . поступает на вход задатчика 8 скорости двигателя, где сравнивается с поступающим от ограничителя 9 максимальной скорости напряжением УЗМ . На выходе задатчика 8 скорости двигателя напряжение Uj .при словии, что при условии,что Uyc и, . Напряжение УЗ , соответствующее заданной скорости, поступает на вход элемента 10 сравнения, с выхода которого управлякнцее
напряжение U, поступает на вход усилителя мощности 11. С выхода последнего ток i поступает к двигателю 12, при вращении которого тахогенератор 13 вырабатывает напряжение Од , соответствующее действительной скорости. Это напряжение поступает на второй вход элемента 10 сравнения, где вычитается из напряжения и, образуя -з л,- Кроме того, напряжение и поступает на один из входов корректирующего блока 14 для периодической корректировки, на второй вход которого поступает напряжение ид . Этот блок выдает регулятору коэффициента усиления 7 управляющее воздействие в тот момент, когда Цдстановится равным нулю. Это воздействие по знаку и по величине находится в прямой функциональной зависимости от напряжения Цд, т. е. при положительном и регулятор коэффициента усиления 7 увеличивает коэффициент усиления усилителя 6, при отрицательном - уменьшает, причем по абсолютной величине изменение коэффициента усиления будет тем больше, чем больше абсолютная величина напряжения UA .
В исходном состоянии ключ 2 разомнут, число д S на выходе счетчика 1 импульсов равно,нулю. Также равны нулю напряжения Уд, U, и, , и , и ток i . Вал двигателя. 12 неподвижен, равны нулю его угловая скорость It), напряжение ид и частота f импульсов на выходе датчика 15 импульсов перемещения. Корректирующий блок 14 управляющего воздействия не выдает, так как ид 0.
Кратковременным замыканием ключа 2 в счетчик импульсов 1 из задатчика 3 вводится число S , равное задаваемому пути позиционирования. На выходе счетчика 1 импульсов поД5 Sa и СООТт
является число
ветствукядие значения получают напряжения Уд, и ц и При достаточно большой величине 5д соответствующее ему значение превышает величину , поэтому-задатчик скорости двигателя 8 выдает напряжение Двигатель 12 разгоняется до скорости, при которой U4«U3 UjfA , т. е. до максимальной скорости.
Во время вращения вала двигателя 12 датчик 15 импульсов перемещения :вырабатывает импульсы, частота f которых пропорциональна угловой скорости W, а число - поворота вала, т. е. пути, проходимому перемещаемьам двигателем 12 объектом. Импульсы, поступая на счетный вход счетчика импульсов 1, вычитаются из содержащегося в последнем числа и, таким образом, числод5-5з- 5дгде Sf путь, пройденный объектом с начала поремете.ня. При уменьшении aS уменьшаются значения напряжений Уд, иц,и Ujj., но пока Uyj.:jU3M) скорость вращения двигателя остается максимальной Сфиг. 2 прямая 1бХ При дальнейшем уменьшении и S, при некотором его значении д S- напряжение OytL становится равным Uji и с этого момента при дальнейшем уменьшении и S до нуля напряжение на выходе задатчика скорости двигателя 8 становится равным (у и уменьшается вместе с ним до нуля, соответственно уменьшается и скорость (Л) вращения двигателя 12 и при д двигатель останавливается (фиг.2, кривая 17), На участке от пересечения с прямой 16 до д эта кривая совпадает с кривой измерения скорости в зависимости от л S только при условии неизменных инерционности и трения у двигателя, механической передачи и перемещаемого объекта. При изменени указанных условий кривая снижения скорости не совпадает с кривой умен шения напряжения и может либо опере жать ее (кривая 18), либо от нее отставать (кривая 19). При это остановка привода произойдет не в точке , а с ошибкой- 5или У-5. Этим величинам будут соответствоват остаточные напряжения-iffyc илибУус величина которых может оказаться ни порога чувствительности элементов привода и поэтому погрешности - и (ус останутся неустраненными. В данном приводе, в случае возникновения таких погрешностей в каком-либо цикле п.озиционирования объекта не допускается их повторение в последующих циклах. Это осуществляется таким образом. При остановке привода с погрешностью- 3 этой погрешности будет соответствовать остаточное напряжение - ( на выходе цифроаналогового преобразователя 4. В момент. остановки корректирующий блок 14 вы работает управляющее воздействие, которое будет приложено к регулятору 7 и последний изменит коэффициен усиления усилителя 6 в соответствии со знаком и величиной напряжения-сГ В данном случае коэффициент усилени будет уменьшен и в следующем цикле позиционирования изменение напряжения Uyc будет происходить по кривой 20 (фиг.2) . При этом величина уменьшения коэффициента усиления, определягацая сдвиг кривой 20 относительно кривой 17, находится в такой функциональной заяксимости от величины - 5, к:;;орак при сохранении условий, вызвавших в данном случае ошибку - 5, обеспечит в следующем цикле позиционирования снижение скорости привода до нуля по кривой 20 с остановкой при . В случае остановки привода в какомлибо цикле с погрешностью cfS регулятор 7 под управляющим воздействием блока 14 увеличит коэффициент усиления усилителя бив последующем цикле изменение напряжения Uyc будет происходить по кривой 21, обеспечивающей остановку привода при л 5 0. В условиях работы с непрерывно следующими друг за другом циклами позиционирования привод исключает возникновен11е недопустимых ошибок, вызываемых сравнительно медленными изменениями трения и моментов инерции как в элементах самого привода, так и у позиционируемого объекта. При этом отпадает необходимость в ступени дотяжки,.что позволяет уменьшить затраты времени при позиционировании. Последнее имеет значение для прокатного и кузнечноштамповочного оборудования для станков и подъемно-транспортного оборудования. Формула изобретения Позиционный привод, содержащий соединенные последователь. .:четчик импульсов, цифроаналоговый преобразователь, функциональный нелинейный преобразователь, усилитель с регулируемым коэффициентом усиления, задатчик скорости двигателя с ограничителем, элемент сравнения, усилитель можности, двигатель и тахогенератор, выход которого связан с вычитающим входом элемента сравнения, а вход - со входом датчика импульсов перемещения, выход которого подключен ко входу счетчика импульсов, отличающийся тем, что, с целью увеличения быстродействия привода, он содержит корректирующий блок, соответствующие входы которого связаны с выходом цифроаналогового преобразователя и выходом тахогенератора, а выход - с управляющим входом усилителя с регулируемым коэффициенте усиления. Источники информации, принятые во внимание при экспертизе 1,Ковальский Н. А. и др. Цифровое программное управление-Киев, Гостехиздат УССР, 1962, с. 7, рис. 1 б 2.Программное управление станками Сборник М., Наука, 1975, с. 104 (прототип).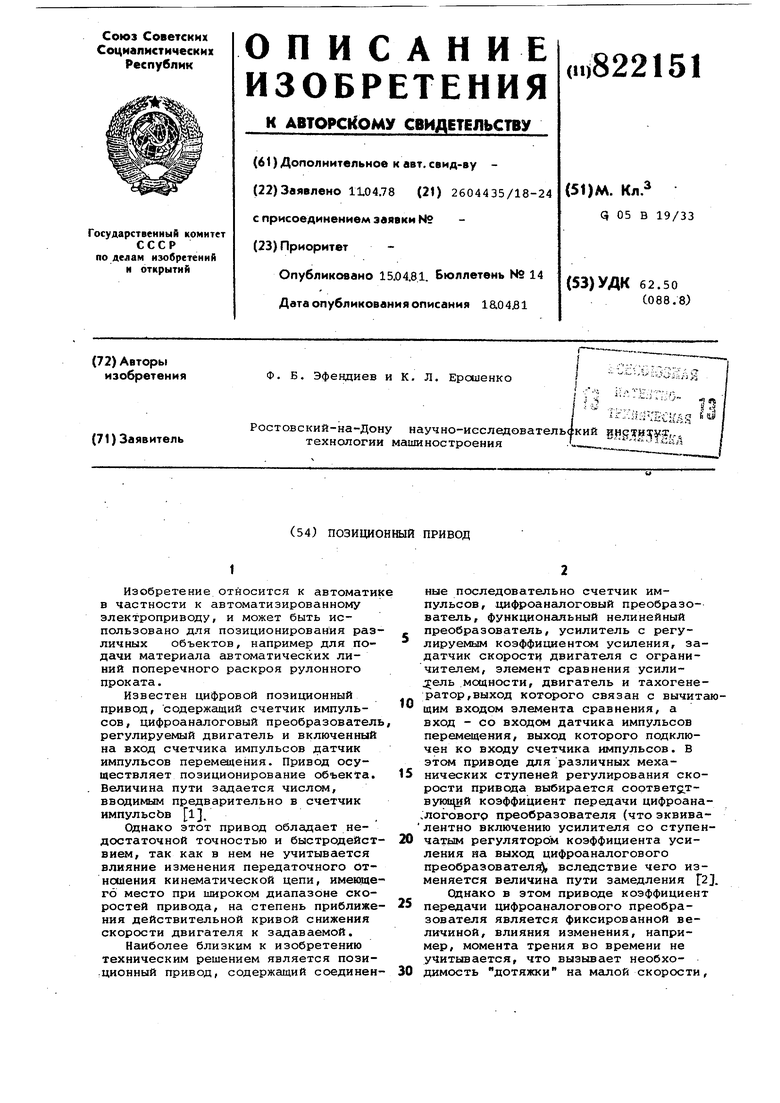
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой позиционный электропривод | 1978 |
|
SU773881A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для управления летучими ножницами сортопрокатных и трубных станов | 1976 |
|
SU656754A1 |
| Устройство для управления летучими ножницами | 1976 |
|
SU733888A1 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| Электропривод постоянного тока | 1983 |
|
SU1185517A2 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Программный регулятор | 1978 |
|
SU744468A1 |