. 1
Изобретение относится к автоматическому управлению и регулированию электропривода и предназначено для точной отработки рабочим органом заданного перемещения.
Известна цифровая система автоматического регулирования, содержащая последовательно соединенные устройство сравнения,- триггер знака, реверсивный счетчик, преобразовател код-аналог, суммирукмций усилитель, привод и преобразователь ангшогкод Г) .
Недостатком системы является невысокая точность позиционирования вследствие отсутствия эффективного торможения привода при OTpa6iOTKe заданных перемещений. Наиболее близким к предлагаемому по технической сущности является по зиционная система регулирования, содержащая сумматор, первый вход которого соединен с блоком задания перемещения, а второй вход - с выходом реверсивного счетчика импульсов, и последовательно соединенные цифрбаналоговый преобразователь, блок регулирования и двигатель, вал которого механически связан с импульсным -датчиком положения, выход которого
через форлшрователь импульсов соединен с входом реверсивного счетчика импульсов.
в этой системе для определения положения механизма служит реверсивный счетчик с блоком формирования импульсов, поступающихот датчика перемещения. Блрк формирования импульсов служит также для определения
o направления врацения.. Полученное в сумматоре рассогласование между заданным и фактическим положением преобразуется в цифроаналоговом преобразователе в аналоговую величину
5 и через нелинейный преобразователь подается на вход аналоговой системы управления скоростью привода с подчиненным контуром регулирования тока электродвигателя 2 .
0
Однако устройство имеет невысокую точность, вызванную зависимостью погрешности позиционирования cHcfet : от нестабильности ее элементов.
Цель изобретения - повышение точ5 .ности системы.
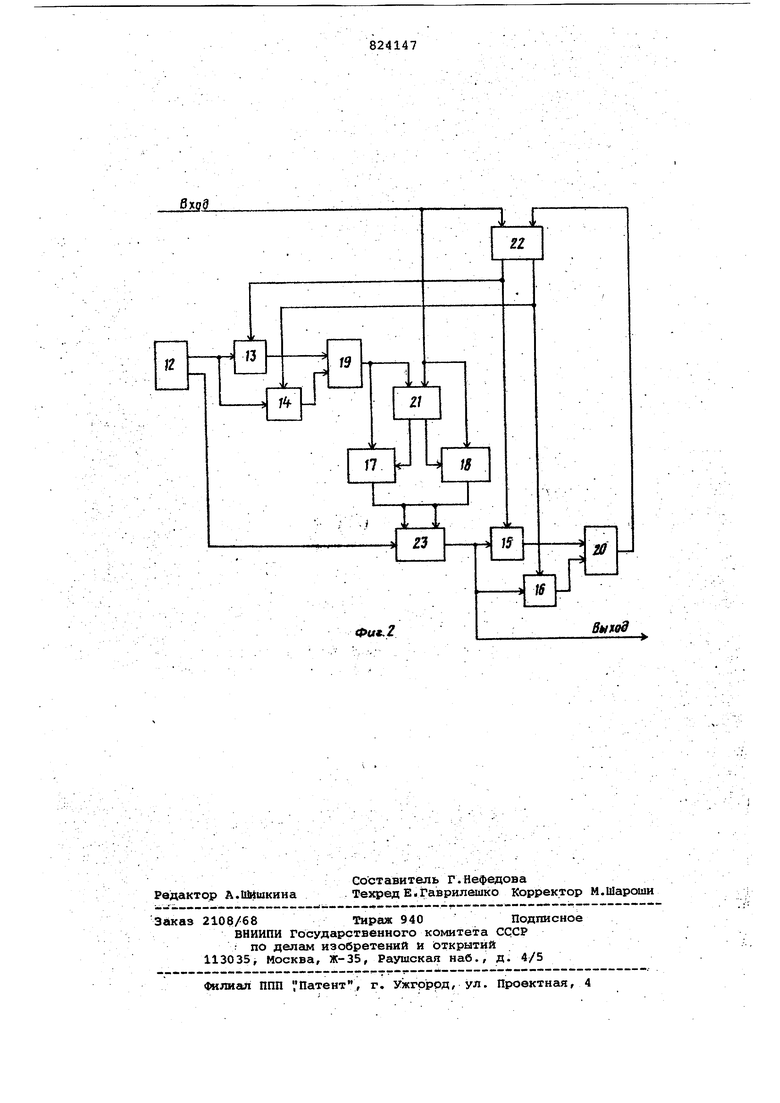
Указанная цель достигается тем, что в нее введены последовательно . соединенные функциональный преобразователь, код-частота, блок ограничения разностной частоты и интегратор. выход которого соединен со входом цифроаналогового преобразователя, причем выход формирователи импульсов подключен к второму входу блока ограничения разностной частоты, а выход сумматора - к входу функционального преобразователя код-частота. При этом функциональный преобразо ватель код-частота содержит генерато эталонных частот, первый выход которого через первый и второй одноканальные ключи подключен к первому и второму входс1м реверсивного счетчика выход которого соединен с первым вхо дом первого блока сравнения кодов и с информационным входом первого мног канального ключа, управляющий вход которого подключен к первому выходу первого блока сравнения кодов, а выход - к первому входу линейного преобразователя код-частота, второй вхо которого соединен с выходом второго многоканального ключа, третий вход с вторым выходом генератора эталонных частот, а выход - с выходом преобразователя и через третий и четвер тый одноканальные ключи - соответст венно с первым и вторым входом трет го реверсивного счетчика импульсов, выход которого подключен к первому входу второго блока сравнения кодов .второй вход которого соединен с вхо дом преобразователя, с вторым входо первого блока сравнения кодов и с информационным входом второго много канального ключа, первый выход - с управляющими входами второго и четвертого одноканальных ключей, а вто рой выход - с управлякяцими входами первого и третьего одноканальных ключей, причем второй выход первого блока сравнения кодов подключен к управляющему входу второго многоканального ключа. На фиг. 1 приведена блок-схема цифровой системы для позиционного регулирования, на фиг.2 - то же, функционального преобразователя код-частота. Система содержит блок 1 задания перемещения, сумматор 2, первый реверсивный счетчик 3 импульсов, функ циональный преобразователь 4 кодчастота, блок 5 ограниченияразност ной частоты, формирователь б импуль сов, интегратор 7, цифроаналоговый преобразователь 8, блок 9 регулирования, двигатель 10, импульсный дат чик 11 положения. Функциональный преобразователь код-частота содержит генератор 12 эталонных частот-, первый-четвертый ключи 13-16 первый и второй многоканальные ключи, и 18, второй и третий реверсивные счетчики 19 и 20 импульсов, первый и второй блоки 21 и 22 сравнения кодов и линейный преобразователь 23 код-частота. Система работает следующим обраом. В исходном состоянии на выходе лока 1 задания перемещения код аанного положения Sj равен нулю. ервый реверсивный счетчик 3 импульов и интегратор 7 наход :тся в нулеом состоянии, сигнал задания скоости Ua иа выходе цифроаналогового преобразователя 8 ранен нулю и двигатель 10 электропривода находится в состоянии покоя. Введенный в блок 1 задания Перемещения код заданного положения подается на первый вход сумматора 2. На выходе сумматора 2 возникает код рассогласования Д5 . КоддЗ подается на вход функционального преобразователя 4, на выходе которого при этом возникают импульсы, следующие с частотой f, величина которой пропорциональна коду ошибки. Импульсы частоты fo, поступают на первый вход блока 5 ограничения разностной частоты. На его выходе .возникают импульсы, частота следования которых не превышает некоторого максимального значения дfм определяемого заданным темпом разгона электропривода. Вырабатываемые блоком 5 импульсы суммируются в цифровом интеграторе 7, выходная величина которого N преобразуется в цифроаналоговом преобразователе 8 в напряжение задания скорости Uj, которое подается на вход блока регулирования, управляющего скоростью двигателя 10. При этом двигатель 10. начинает разгоняться, импульсный датчик 11 перемещения начинает выдавать импульсы, частота следования которых пропорциональна скорости вращения п двигателя. Эти импульсы через формирователь б импульсов подаются на второй вход блока 5 и являются сигналом обратной связи в цифровом контуре регулирования скорости. Импульсы с выхода формирователя б импульсов подаются также на вход первого реверсивного счетчика 3 импульсов, производящего их алгебраи-.ческое суммирование. При этом код.5ф на выходе счетчика 3 представляет собой фактическое поло5 аение механизма и является сигналом обратной связи в цифровом контуре регулирования положения. Разгон электропривода продолжается до тех пор, пока частота импульсов, поступакадих с формирователя 6 fqj, не станет равной f, а движение на установившейся максимальной скорости будет иметь место в том случае, если к моменту окончания разгона величина рассогласования по положению д S превышает некоторое значение uSy, соответствующее максимальному значению задающей частоты f. В процессе отработки заданного перемещения величина рассогласования ПОположению uS, а следовательно, и величина задающей частоты f уме шаются. При достижении соотношения fn fqjSHaK разностной частоты ст новится отрицательным и интегратор работает в режиме вычитания импуль сов. Код Ny,Ha выходе интегратора, а следовательно, и сигнал задания скорости U/J на выходе цифроаналого вого преобразователя уменьшается и электропривод замедляется. При дос жении величиной 5ф значения равног S рассогласование становится равны нулю и электропривод останавливаетс в заданном положении. Реализацию оптимальной тахограмм торможения электропривода обеспечивает функциональный преобразователь код-частота, работающий следукяцим образом. В исходном состоянии реверсивные счетчики 19 и 20 находятся в нулево положении, а сигнал рассогласования Д5 равен нулю. При этом на первом и втором выходе второго блока 22 сравнения кодов имеются нулевые сиг налы, которые подаются на управляющие входы одноканальных ключей 13 и 14 и запрещают прохо хдение импуль сов эталонной частоты f/j с первого выхода генератора 12 на входы счетчика 19- На первом выходе первого блока 21 сравнения кодов имеется .единичный сигнал, открывающий много канальный ключ 17, а на втором выхо де имеется нулевой сигнал, закрывающий многоканальный ключ 18. Так как код, записанный в реверсивном счетчике 19 N и код uS, поступающи через указанные многоканальные ключ на вход линейного преобразователя 23 код-частота, равны нулю, то на выходе последнего сигнал также раве нулю. При появлении отличного от нуля сигнала дS на втором выходе блока 2 возникает единичный.сигнал, открыва щий одноканальный ключ 13, и на первый вход счетчика 19 поступают импульсы первой эталонной частоты f. С этого момента код ы на выходе счетчика 19 начинает увеличиваться. Этот код через многоканЬльный ключ 17 подается на вход преобр зователя 23, в результате чего на выходе последнего возникают импульсы, следующие с частотой -4 4 к где f2 - вторая эталонная частота, К - регулируемый коэффициент линейно возрастающий во вре мени. Импульсы частоты f .j поступаиот через одноканальный ключ 15 на первый вход счетчика 20, выходной код которого NJ также начинает увеличиваться. В момент времени t, когда достигается равенство кодов.N и л5, на втором выходе блока 22 появляется нулевой сигнал и подача импульсов .частоты f на первый вход счетчика 19 и частоты f на первый вход счетчика 20 прекращается. При этом в . счетчике 19 фиксируется число N , а в счетчике. 20 число N2 AS i3-2; (3) Совместное решение уравнений (1)(3) дает i -Щ 3- к. В дальнейшем, начиная с момента времени t, соотношение (4) сохраняется при любом изменении кода дS относительно значения, зафиксированного в момент времени t. При увеличении кода д S работа блока аналогична. При уменьшении кода д5 единичный сигнал появляется на первом выходе блока 22 и импульсы частот f и f поступают через одноканальные ключи 14 и 16 на вторые входы соответственно счетчиков 19 и 20, уменьшая их содержимое, пока не достигается равенство ftS N2В процессе торможения,при уменьшении кода рассозрласования д S , задающая частота снижается в соответствии с выражением (4). При этомскорость электропривода изменяется линейно во времени с постоянным заданным замедлением. Такой процесс торможения происходит до тех пор, пока величина рассогласования д5 не станет меньше кода N на выходе счетчика 19. С этого момента времени на втором выходе блока 21 появляется единичный а на первом - нулевой сигнал, благодаря чему на вход линейного преобразователя 23 код-частота подается код uS, а задающая частота f изменяется пропорционально коду д5 в соответствии с выражением ;,ЛВ. Переход с параболического на линейный участок характеристики функионального преобразователя код-часота обеспечивает высокое качество ереходного процесса системы, а, ледовательно, и точность позициониования. При достижении величиной со значения, равного S rвеличина ассогласования становится равной улю и электропривод оствнавливается. Таким образом, предлага.емая циф-товая система позиционного регулироания обеспечивает высокую точность озиционирования при оптимальной ахограмме торможения электропривода. В случае применения системы, обладаю щей высоким быстродействием и повышенной точностью позиционирования, например в металлургическом приводе нажимных винтов клетей, либо в систе MZDi .безупречной подачи проката под порезку, значительно повышаются производительность оборудования в целом при высокой экономии металла, что дает значительный технико-экономический, эффект. Формула изобретения 1. Цифровая система для позиционного регулирования, содержащая сумматор, первый вход которого соединен с блоком задания перемещения, а второй вход - с выходом первого реверсивного счетчика импульсов, и последовательно соединенные цифроаналоговый преобразователь, блок регулиро.вания и двигатель, вал которого механически связан с импульсным датчиком положения, выход которого через формирователь импульсов соединен с входом первого реверсивного счетчика импульсов, отличающая с я тем, что, с целью повышения точности системы, в нее введены последователь но соединенные функциональный преобразователь код-частота, блок ограничения разностной частоты и интегратор, выход которого соединен db входом цифроаналргового преобразователя, причем выход формирователя импульвов подключен к второму входу бл.ока ограничения разности частоты, а выход суквматора - к входу функционального преобразователя код-частота 2. Устройство по П.1, отличающееся тем, что функциональ ный преобразователь код-частота со- держит генератор эталонных частот, первый выход которого через первый и второй одноканальные ключи подключены к первому и второму входам реверсивного счетчика, выход которого соединен с первым входом первого блока сравнения кодов и с информационным входом первого многоканального ключа, управляющий вход которого подключен к первому выходу первого блока сравнения -кодов, а выход к первому входу линейного преобразователя код-частота, второй вход которого соединен с выходом второго многоканального ключа, третий вход с вторым выходом генератора эталонных частот, а выхс(д - с выходом преобразовачеля и через третий и четвертый одноканальные .ключи - соответственно с первым и вторым входом третьего реверсивного счетчика импульсов, выход которого подключен к первому входу второго блока срав нейия кодов, второй вход которого соединен с входом преобразователя , с вторым входом первого блока сравнения кодов и с информационным входом второго многоканального ключа, первый выход - с управляющими входами второго и четвертого одноканального Ключей, а второй выход - с управляющими входами первого и третьего одноканальных ключей, причем второй выход первого блока сравнения кодов подключен к управляющему входу второго многЪканального ключа. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство.СССР №546855, кл. О 05 В 19/20, 1973. 2: Гарнова В.К. и др. Унифицированные систекы автоуправлёния электроприводом в Металлургии. М., Металлургия , 1977, с, 98 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для позиционного регулирования | 1985 |
|
SU1280572A1 |
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Цифровая система регулирования электропривода | 1980 |
|
SU930246A1 |
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Манипулятор частоты без разрыва фазы | 1987 |
|
SU1515384A1 |
| Электропривод постоянного тока | 1987 |
|
SU1515311A1 |