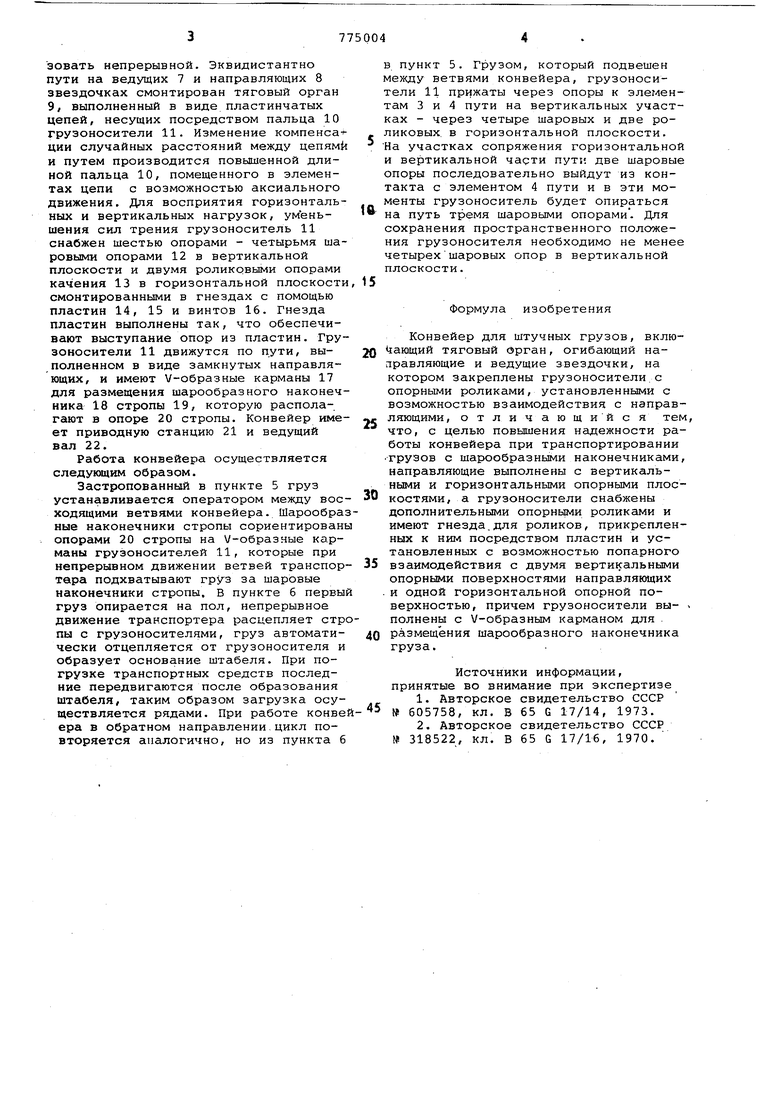
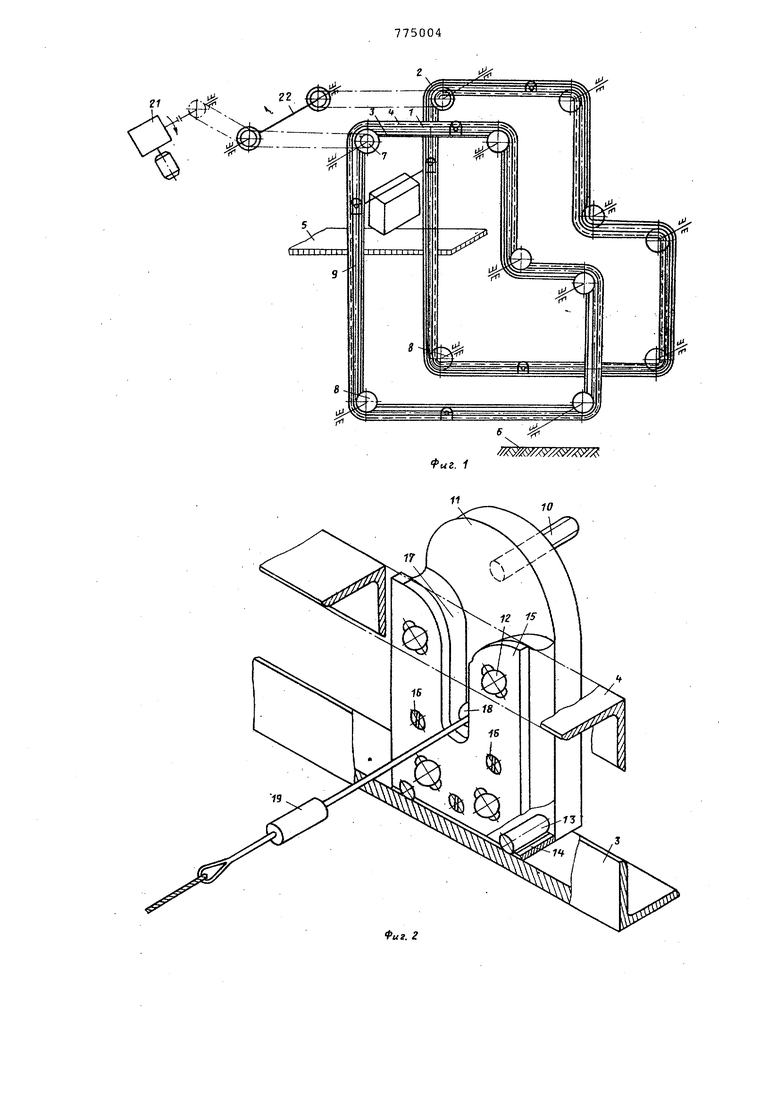
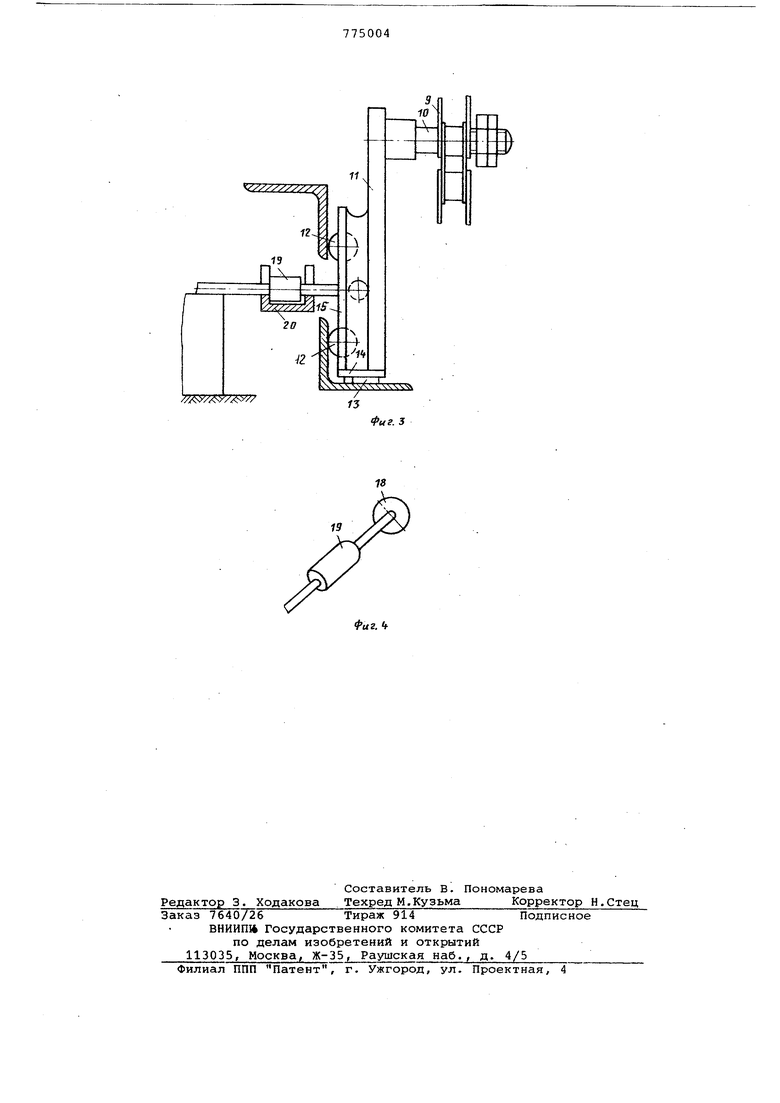
Изобретение относится к транспорт ным средствам и может быть использовано при механизации погрузочно-разгрузочных работ транспортных средств и складских операций. Известен конвейер для штучных гру зов, содержащий опорную конструкцию, приводную станцию, соединенную муфто с закрепленным в сферических подаиипниках ведущим валом, на котором уста новлены ведущие звездочки, натяжную станцию и тяговые цепи с закрепленны ми на них грузоносителями , Однако такой конвейер не позволяет производить погрузочно-разгрузочные работы без останова. Это снижает производительность труда. Известен конвейер для штучных гру зов, включающий тяговый орган, огибающий направляющие и ведущие звездочки, на которых закреплены грузоносители с опорными роликами, установленными с возможностью взаимодействия с направляющими 2. Однако в таком конвейере не обеспечивается достаточно надежная работа при транспортировании грузов с шарообразными наконечниками. Целью изобретения является повышение надежности работы конвейера при транспортировании грузов с шарообразными наконечниками. Указанная цель достигается тем, что направляпощие выполнены с вертикальными и горизонтальными опорными плоскостями, а грузоносители снабжены дополнительными опорными роликами и имеют гнезда для роликов, прикрепленных к ним посредством плайтин и установленных с возможностью попарного взаимодействия с двумя вертикальными опорными поверхностями направляющих и одной горизонтальной опорной поверхностью, причем грузоносители выполнены с V-образным карманом для размещения шарообразного наконечника груза. На фиг. 1 изображен конвейер . для штучных грузов, общий вид; на фиг. 2 - участок конвейера с грузоносителем, помещенным в направляющие; на фиг. 3,- момент фиксации шарового наконечника стропы, условно показанного на горизонтальном участке пути; на фиг. 4 - наконечник стропы груза. Конвейер содержит ветви пути 1 и 2, состоящие каждая из двух элементов 3 и 4. Верхнюю часть пути между пунктами 5 и 6 целесообразно испольэовать непрерывной. Эквидистантно пути на ведущих 7 и направляющих 8 звездочках смонтирован тяговый орган 9, выполненный в виде пластинчатых цепей, несущих посредством пальца 10 Грузоносители 11. Изменение кoмпeнca ции случайных расстояний между цепями и путем производится повышенной длиной пальца 10, помещенного в элементах цепи с возможностью аксиального движения. Для восприятия горизонтальных и вертикальных нагрузок, уменьшения сил трения грузоноситель 11 снабжен щестью опорами - четырьмя шаровыми опорами 12 в вертикальной плоскости и двумя роликовыми опорами качения 13 в горизонтальной плоскости смонтированными в гнездах с помощью пластин 14, 15 и винтов 16. Гнезда пластин выполнены так, что обеспечивают выступание опор из пластин. Грузоносители 11 движутся по пути, выполненном в виде замкнутых направляющих, и имеют V-образные карманы 17 для размещения шарообразного наконечника 18 стропы 19, которую располагают в опоре 20 стропы. Конвейер имеет приводную станцию 21 и ведущий вал 22.
Работа конвейера осуществляется следукадим образом.
Застропованный в пункте 5 груз устанавливается оператором между восходящими ветвями конвейера. Шарообразные наконечники стропы сориентированы опорами 20 стропы на V-образные карманы грузоносителей 11, которые при непрерывном движении ветвей транспортера подхватывают груз за шаровые наконечники стропы, в пункте 6 первый груз опирается на пол, непрерывное движение транспортера расцепляет стропы с грузоносителями, груз автоматически отцепляется от грузоносителя и образует основание штабеля. При погрузке транспортных средств последние передвигаются после образования штабеля, таким образом загрузка осуществляет ;я рядами. При работе конвейера в обратном направлении.цикл повторяется аналогично, но из пункта б
в пункт 5. Грузом, который подвешен между ветвями конвейера, грузоносители 11 прижаты через опоры к элементам 3 и 4 пути на вертикальных участках - через четыре шаровых и две роликовых, в горизонтальной плоскости. На участках сопряжения горизонтальной и вертикальной части пути две шаровые опоры последовательно выйдут из контакта с элементом 4 пути и в эти моменты грузоноситель будет опираться на путь тремя шаровыми опорами . Для сохранения пространственного положения грузоносителя необходимо не менее четырехшаровых опор в вертикальной плоскости.
Формула изобретения
Конвейер для штучных грузов, вклю 1ающий тяговый орган, огибающий направляющие и ведущие звездочки, на котором закреплены грузоносители с опорными роликами, установленными с возможностью взаимодействия с направляющими , отличающийся тем,
что, с целью повышения надежности работы конвейера при транспортировании грузов с шарообразными наконечниками, направляющие выполнены с вертикальньми и горизонтальными опорными плоскостями, а грузоносители снабжены дополнительными опорннлми роликами и имеют гнезда,для роликов, прикрепленных к нш посредством пластин и установленных с возможностью попарного
взаимодействия с двумя вертикальными
опорными поверхностями направляющих и одной горизонтальной опорной поверхностью, причем грузоносители вы- полнены с V-образным карманом для .
размещения шарообразного наконечника груза.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 605758, кл. В 65 G 17/14, 1973.
2.Авторское свидетельство СССР № 318522, кл. В 65 G 17/16, 1970. (
//tf: / // / / /
иг. 1 /// // Y//fy//
Фиг. 3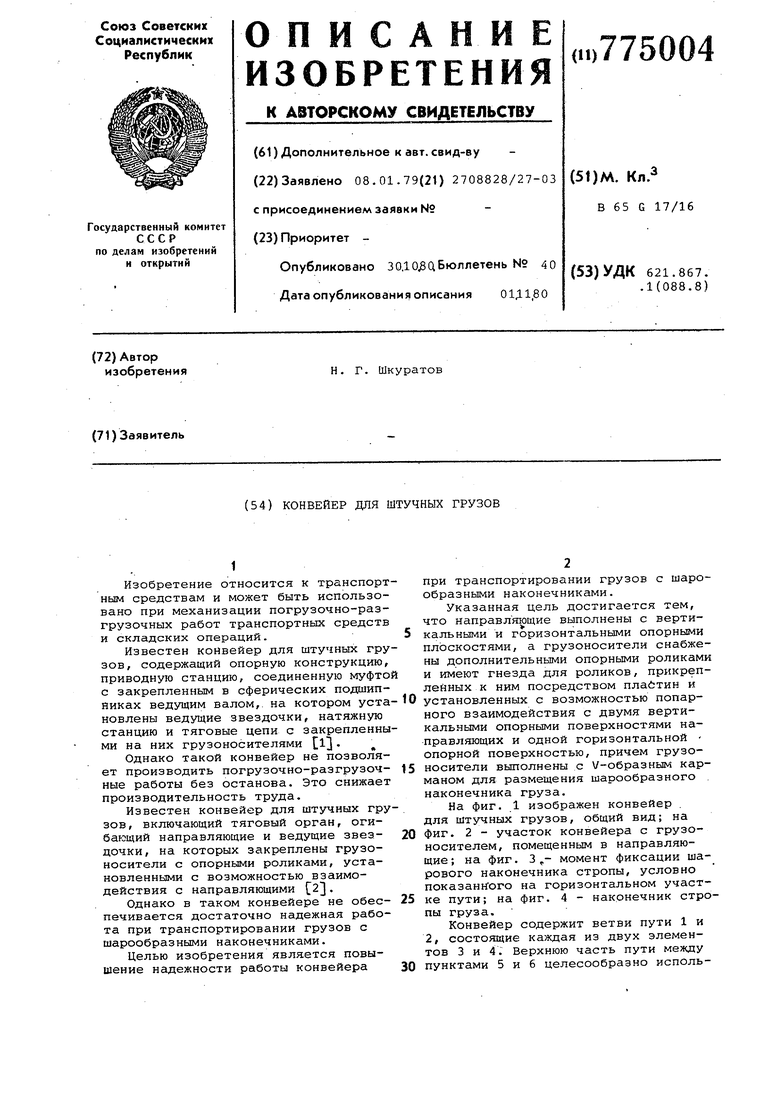
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейер для штучных грузов | 1983 |
|
SU1139678A1 |
| Конвейерное устройство для перемещения груза из крытого вагона | 1988 |
|
SU1640081A1 |
| Питатель для изделий кольцевой формы | 1978 |
|
SU854823A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1247321A1 |
| Крутонаклонный конвейер | 1990 |
|
SU1740269A1 |
| Пластинчатый конвейер | 1986 |
|
SU1339064A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Элеватор для транспортирования штучных грузов | 1980 |
|
SU905159A1 |
| Устройство для перемещения груза | 1979 |
|
SU783139A1 |
| КОЛЬЦЕВОЙ КОНВЕЙЕР | 2003 |
|
RU2255031C1 |
13
