на одной оси с которым размещены щека с отверстием и транспортный трубощэовод а все роторы имеют охватьшающие часть их поверхности направляющие, на которых смонтированы устройства контроля размеров грузов, снабженные датчиками выдачи команды на возможность транспортирования груза по трубопроводу к тготребителям.
Кроме того, устройство контроля раз- ю меров грузов может включать в себя механизмы контроля грузов но длине, которые встроены в направляющие и содержат калодый две центрирующие плашси с калибрующими головками. is бающие ротор, причем одна из гаанок нетюдвижйа, а другая, взанмоде твующая с датчиками, шарнкрно закретшена на неподвижной , подт1ру кинена и имеет ирисЕособление для настройки20
На разлжр груза, а таклсе устройства контроля размеров грузов могут вклю чать S себя механиз коггтроля. грузов в погоречном сеченки, которые вст-роены в Направляющие н растгсшожены друг от 25 друга вд(Х)-1Ь периметров роторов на расстоянии, равном шату между каналами на воверхности роторов.
Приспосо&хениедш настройки на рез- мэр груза содержит микрометрическийзо
винт с гайкой, одним концом шаркирно соединевдагй с подпружиненной впанкой, а другим кондом - с неподвижной опорой, а механизм контроля грузов в иошречном сечений содержнт два калибра, каждый 35 из которых С1юбжен i под пружине EHHivs иальцем, взаимодействующим с датчиком.
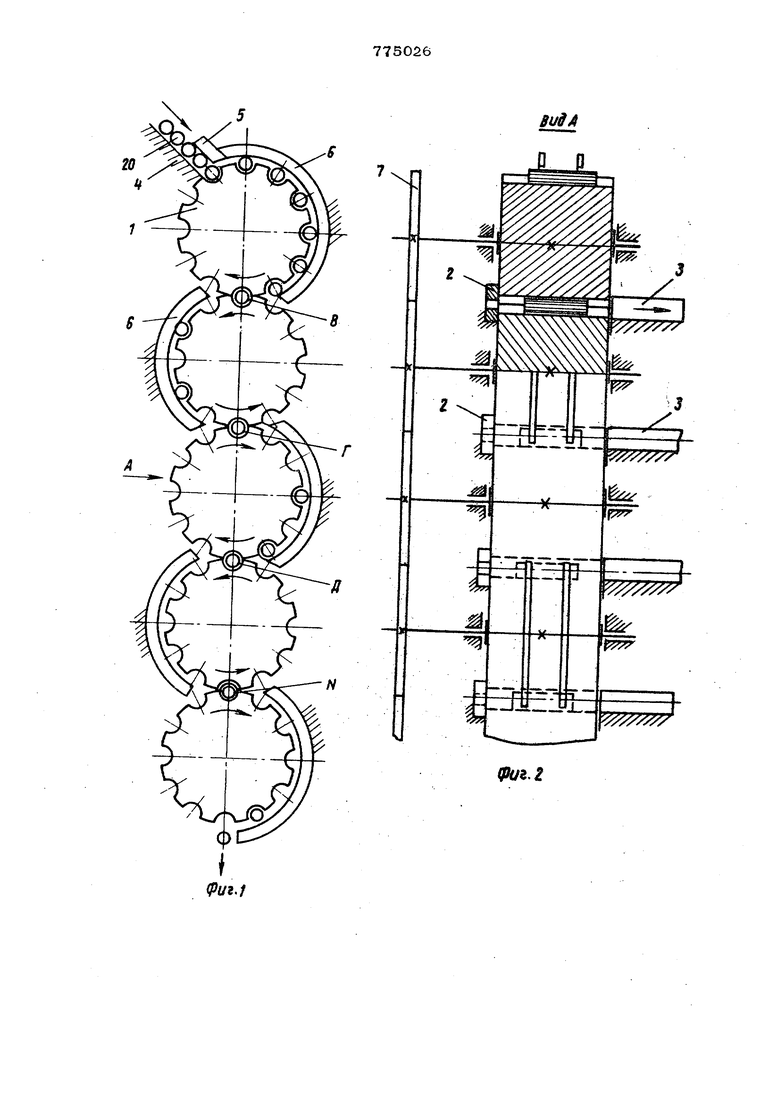
На фиг. 1 схематически изображена отправочная станция, вид спереди. На фиг. 2 - вид по стрелке А фиг. на 1|40
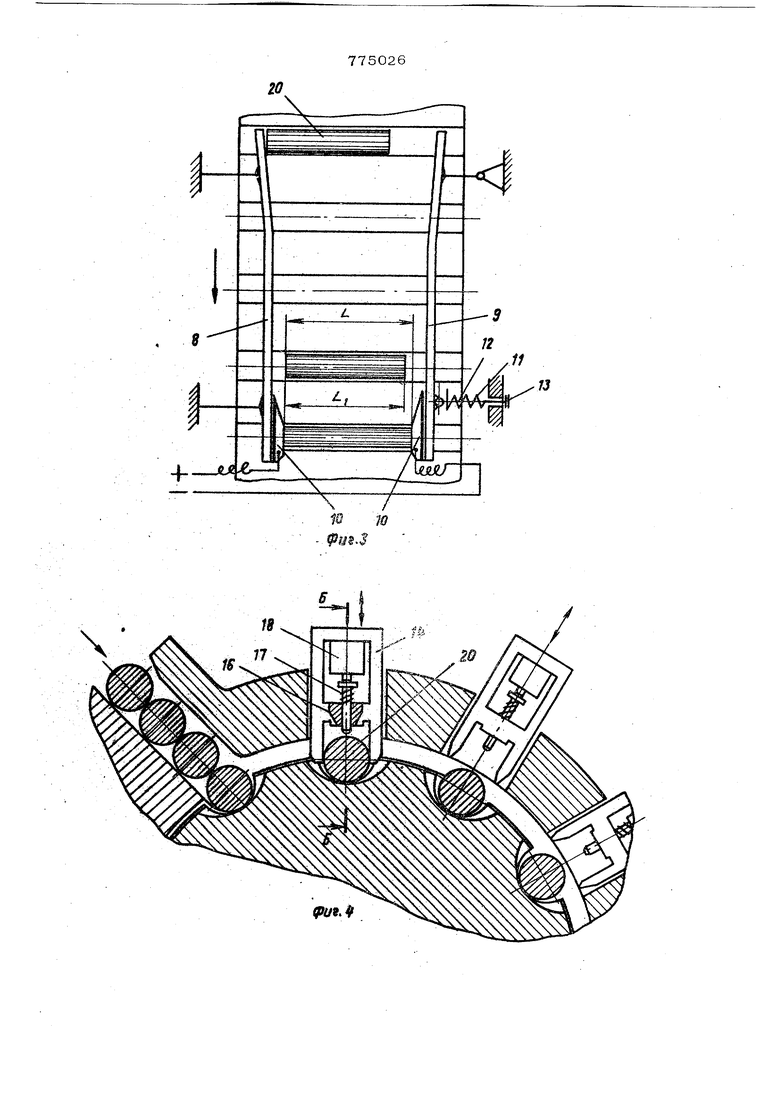
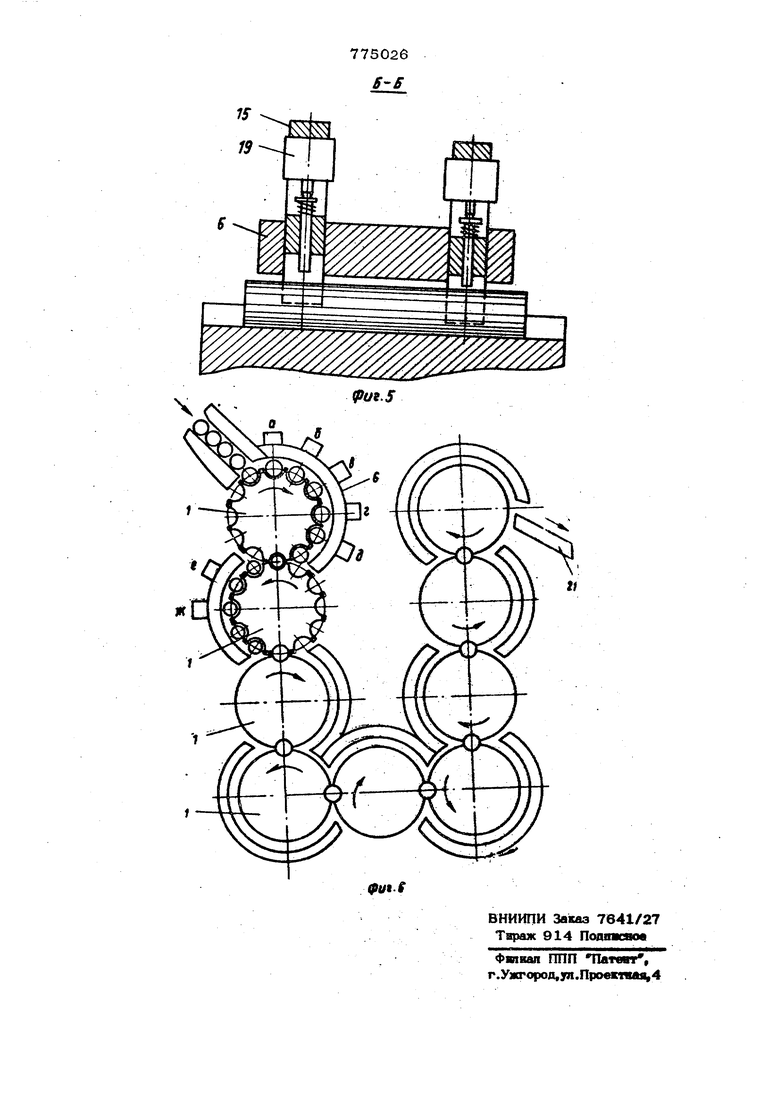
1ш фйг. 3 - механизм контроля грузов по длине; на фиг. 4 - механизм контро ля грузов в пошречном сечейии; на фиг. 5 - резрез Б-Б на фиг.4 на фиг.б один из вариантов компоновки станции. 45
Последовательно респш1ол еш1ые роторы 1 е продольными paBHOJi« pHO располо женными каналами полукруглого сечения на поверхности тфи взаимодействии ькжду собой на опредежнном уше поворота, об- 50 разуют каналы круглого сечения В, Г, fl,., JV , имеющие с одной стороны щеки 2 с отверстием для подвода сжатого воз. духа, а с другой трансгЕОртные трубопроводы 3. К первому ротору примыкает пита 55 тель в виде наклонного желоба 4 с отсе« кателем 5,- Каждый ротор охвачен но части его поверхности направляющей 6, закретвюнной неподвижно. Все роторы иьаэют
общий привод через зубчатую передачу 7. В каждую охватывающую направляющую 6 (кроме последней) встроен механизм контроля грузов по длине, содержащий две огибающие ротор центрирукицие планки 8 и 9 с Калибрующими головками 10 н приспособление для настройкк на размер груза, которое содержит упругий элемент 11, микрометрический винт 12 и гайку 1 Планка 8 неподвижна, а планка 9 шарнирно закреплена на неподвижной по отношению к ротору опоре.
В направляющую первого ротора (т1ри необходимости и второго ротора, в зависимости от количества групп сортировки) встроен механизм контроля груз в поперечном сечении, который содержит два спаренных калибра 14 и 15, один из которых проходной, другой непроходной,
Калибры 14 и 15 имеют привод для кх перемещений (не показан).
Каждый из калибров 14 и 15 снабжен палылем 16 с пружиной 17, взаимодействующим с датчиком 18 илИ 19.
Отправочная станция работает следующим образом.
По наклонному желобу 4 груз 20 подается к ротору 1 и западает в канал полукруглого сечения на его поверхности и отсекается отсекателем 5. Роторы, связанные с приводом 7, совершают вращатэ.пьное движение с кратковременной остановкой, необходимой для отправки груза 20. Ограниченный направл5иощей 6 груз 3 ироцессе движения передается с ротора на ротор до тех пор, пока не гетстуяает команда на его отправку из ка1шго «гшбо канала, круглого сечения В, Г, Д... /V , образуемого двумя соседними роторами. При подаче , чераз огверстие в щеке 2 подается И№пуйъс сжатого воздуха и по транспортному труйэпроводу 3 груз 2О удаляется ИЗ отправочной станции к потребителю.
Станция может работать в трех режимах.
I. Транспортирсюание груза к различным потребителям с сортировкой только по длине и отделением брака.
11. Трайспортирование груза к различным потребителям с сортировкой только но размерам в поперечном сечении и от дежнием брака.
IH. Транспортирование груза к различным потребителям с одновременной сортаровкой к по длине и по размерам . -а m)Tispe4HOM сечении и отделением бра572. Транс тгортирование грузов к различным потребителям с сортировкой толь ко тю длине и отделением брака. Каждый ротор снабжен механизмом контроля груза по длине, причем меха низм на первом роторе настроен на больший размер, а на последующих в сторону уменьшения размера. При вращении ротора груз, удерживаемый от выпадения Eaib равляюшей 6, Е&правляется центрирующимипланками, огибающими ротор. При движении ротора, удерживаемый в его канале груз проходит между калибрующими головками 1О, причем если длина заготовки t) равна размеру Ь t установленному мелоду калибрукяцими головками 10, то своими торцами груз замыкает цепь и срабатывает датчик на транспортирование груза в первый же канал круглого сечения, образующий вмес те с соответствующими ему щекой с отверстием и транспортным трубохфоводом первый ттункт. При этом система выдачи комавды мо..:зт 6fciTb кроме электрической и любой другой - тюевматической, гидравлической и т.д., может быть установлен любой датчик, непосредственно взаимодействующий с планкой 9. Если размер груза по длине меньше расстояния, установленного между калибрующими головками, то груз ротором передается на следующий ротор к калибру с размером, настроенным на меньшую дли ну, и так с ротора на ротор до тех пор, пока размер груза не будет сосэветство- вать расстоянию между . калибрующими головками. Если длина груза настолько мала, что окажется меньше самого минимального расстояния между к,9либрующими головка ми, то на последнем роторе груз удалнет ся в брак. Калибрующие головки 10 на первом роторе и ттервый пункт отправлени служат для удаления брака с размерами большими, чем . и. Транспортирование грузов к разлячвым потребителям с сортировкой толь ко по размерам в поперечном сечении, В огибающей направляющей 6 первого ротора устансжлены попарно калибры 14 и 15, один из которых проходной, другой непроходной Пары калибров р ;положеНы по незамкнуто периметру р« тора с шагом, равным шагу между кана лами на поверхнсйти ротора. Количество пар калибров равно числу грутга, на кото рые сортируется груз плюс единица тюрваа пара калибров и первый дунет оти 66 правлвння служат для удаления брака по максн1 4альным размерам в поперечном сечении, В момэнг останстки роторов,, т.е. в момент удаления груза из кана лОв круглого сечения, все пары калибров совершают возвратно-поступательное движение, т.е. подходят к грузу, обмеряя его и возвращаясь в исходное положение, Если первая пара калибров ве оашатывает груз, а следовательно груз шэ воздействует на подпружиненный 11ал0а 16 и не взаимодействует с датчиками 18 к 19, значит это брак и в тюрвом пункте отправления он удаляется. Если один из пары калибров, ватфимер 14, охватил груз и через посредство подпружиненного пальда 16 воздействовал на датчик 18, а другой калибр 15 не охватил груз и следовательно ве произоааоо воздействия подпружиненного пальца на датчик 19, дается разрешакмцая комаща на травюпортирсвание груза в ближайшем пункте отправления. Если оба охватили груз и та лучилось сдвоенное воздействие одновременно на оба датчика, то раэрешакхцеЁ команды не выдается. Каждый пункт отправления получает разрешакмцую команду на отправку груза только с соответствукмяей ему позиции 3ai«iepa. Если же все пары калибров оказались проходными, то груз тфохсдйт через все пункты отправления и на последнем роторе самопроизвольно удаляется в брак. 111. Транспортирование грузе к различным потребителям с сортировкой во длине, по размерам в поперечном сечении и отдеотенин брака, На фиг, 6 показана схема оттфавочной станции на семь отправочных станций с сортировкой грузов на шесть грутга и удалением брака, которая служит одним из многочислеаных вариантов компоВ(жки установки, Груз увлекаемый каналами полукруглого сечения ротора, контролируется в тютюречном сечении парными калибрами на позициях а, б, в, г, д, е, ж. По длние контролы груза. производится на соот тствующих участках роторов со 2-го по 8-й включительно. Если на позиции а оказался груз с пошречными размерами, превышающими максимально допустимые и не был охва- чен парой калибров, то дается комазда на удаление этого груза в брак в пэрвый njHKT отирйЕяэняя, который в данном случае слулч-иг только для удаления брака. В случае, если груз имеет размеры в
веречном сечении мевеб минимально допустимых ., то груз пропускается через все роторы и по лотву 21 удаляется в брак, т.к. проходя через позиции а, б, в, г, д, е, ж ни на одной из них не получает разрешающей команды на OTV. правку в одном из пунктов оттфавления.
При контроле по длине, если груз оказался длиннее максимально допустимой длины он удаляется в брак первым пунктом отправления (канал круглого сечения В). Груз с меньшей длиной, чем минимально допустимая, свободно проходит до последнего ротора, не включив ни один из датчиков, удаляется в брак по лотку 21 независимо от размеров в поперечном сечении.
При движении с ротора на ротор, груз получив на одной из позиций разрешающую команду механизма контроля в поперечном сечении на отправку. прог ускается до совпадения с разрешающей командой, выдаваемой при контроле груза по длийе. При совпадении этих команд вьздается команда на отправку к потребителю ближайшей оттфавочной станцией.
Возможны различные сочетания сортировки, например, грузы с размерами в поперечном речении делятся на 3 if Л пы, а по длине на 6; в note речном сечении на 6 групп, а по длине иа 3; и т.д.
Формула изобретения
1. Отправочная станция установки для
пневмотранспорта штучных грузов по авт. св. М 678003, отличающаяс я тем, что с целью расширения технологических возможностей за счет совмещения транспортирования грузов с их сортировкой и доставкой к различным потребителям, станция дополнительно снабжена по крайней мере одной щекой с отверстием, одним транспортным трубопроводом и одним ротором, расположенным в одной плоскости с другими роторами и контактирующим с непримыкакш1им к наклонному желобу ротором, образуя К1энал круглого сечения, на одной оси
с которым размещены щека с отверстием и транспортный трубопровод, а все роторы имеют охватывающие часть их поверхности направляющие, на которых смонтиJ рованы устройства контроля размеров грузов, снабженные датчиками выдачи команды на возможность транспортирования груза по трубопроводу к потребителям.
2.Отправочная станция по Tt.l,
Q отличающаяся тем, что устройство контроля размеров грузов включает в себя механизмы контроля грузов по длине, которые встроены в направляющие и содержат каждый две центрирующие
3 плакки с калибрующими головками, огибающие ротор, причем одна из планок нетгодвижна, а другая, взаимодействующая с датчиками, шарнирно закреплена на неподвижной опоре, подтфужинена и
0 имеет приспособление для настройки на размер груза.
3.Отправочная станция по п.1, отличающаяся тем, что устройства контроля размеров грузов включают в себя механизмы кйнтроля груза в поперечном сечении, которые встроены в направляющие и расположены друг от друга вдоль периметров роторов на расстоянии, равном шагу между каналами
0 на поверхности роторов.
4.Оттфавочная станция по ПТ1.1 и 2, отличающаяся тем, что приспособление для настройки на размер груза содержит микрометрический винт
5 с гайкой, одним концом шаршрно соединенный с подпружиненной планкой, а другим концом с неподвижной опорой.
5.Отправочная станция по пп. 1 и 3, отличающаяся тем, что
кюханизм контроля грузов в поперечном сечении содержит два калибра, каждый из которых сна6л ен подпружиненным пальцем, взаимодействующим с датчиком.
Источники информации.
тфинятые во внимание при экспертизе 1. Авторское свидетельство СССР №678003, кл. В 65 G 51/28, 10.05.77
BuiA
3
Фиг. I
| название | год | авторы | номер документа |
|---|---|---|---|
| Станция для приема и отправки штучных грузов в трубопровод | 1984 |
|
SU1204515A1 |
| Отправочная станция установки для пневмотранспорта штучных грузов | 1977 |
|
SU678003A1 |
| ДВУХТРУБНАЯ УСТАНОВКА ДЛЯ ПНЕВМАТИЧЕС ТРАНСПОРТИРОВАНИЯ ГРУЗОВ В КОНТЕЙНЕРАХ ПО ТРУБОПРОВОДАМ | 1973 |
|
SU380569A1 |
| Система коммуникаций здания | 2022 |
|
RU2785231C1 |
| Устройство для управления пневматической почтой | 1977 |
|
SU734099A1 |
| Глобальная логистическая система, включающая модули для перемещения людей, систему транспортировки грузов и используемые в ней транспортные средства | 2020 |
|
RU2743800C1 |
| СПОСОБ КОНТРОЛЯ НЕДОРЕЗА РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349873C1 |
| Измерительно-сортировочный автомат | 1960 |
|
SU142442A1 |
| Обнотрубная установка для пневматического транспортирования грузов в контейнерах | 1975 |
|
SU584494A1 |
| Автомат для контроля внутренней резьбы гаек | 1958 |
|
SU121241A1 |
t/9.
