120Д515
2.Станция по п. 1, о т л и ч а ю - направлении ее перемещс ния тяги, а щ а я с я тем, что каретка связана с станция снабжена датчиком наличия приводом продольного перемещения ка- груза в камере, связанным с упомяну- меры посредством подпружиненной в той тягрй.
1
Изобретение относится к пневматическому транспортированию штучных грузов, преимущественно калибров, п трубам, а именно к станциям для приема и отправки щтучных грузов в трубопровод, и может быть использовано для контроля внутреннего диаметра труб при их изготовлении.
Целью изобретения является улучшение удобства обслуживания станции.
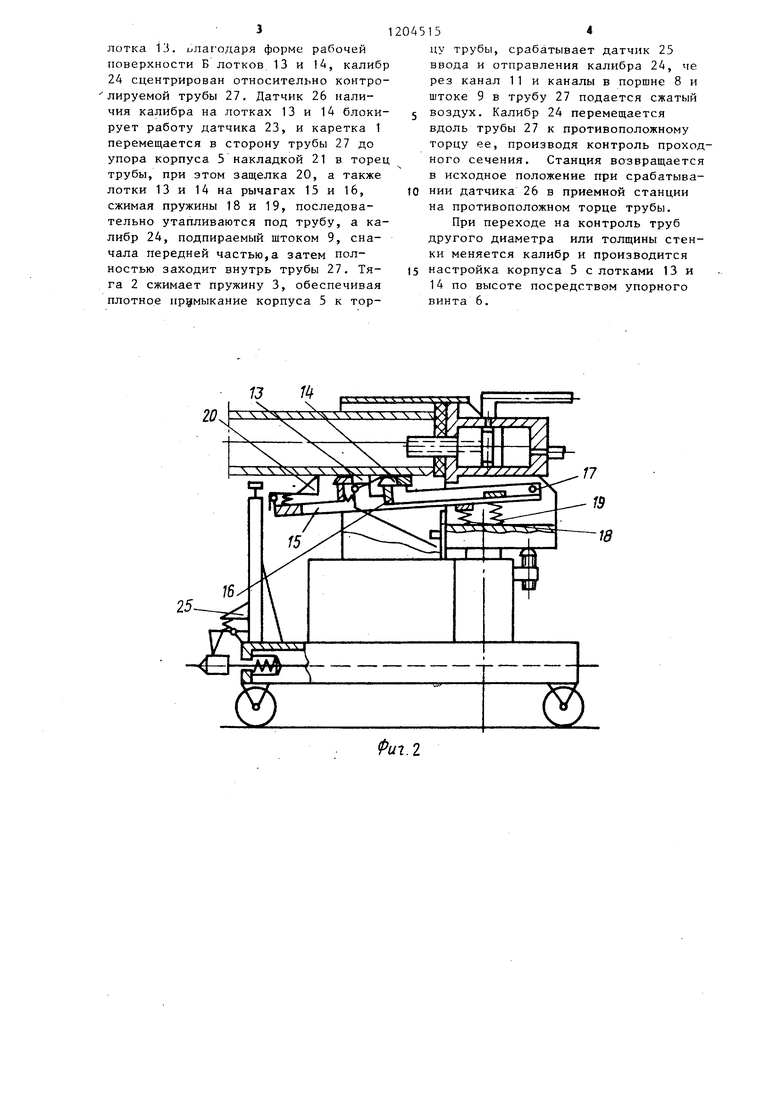
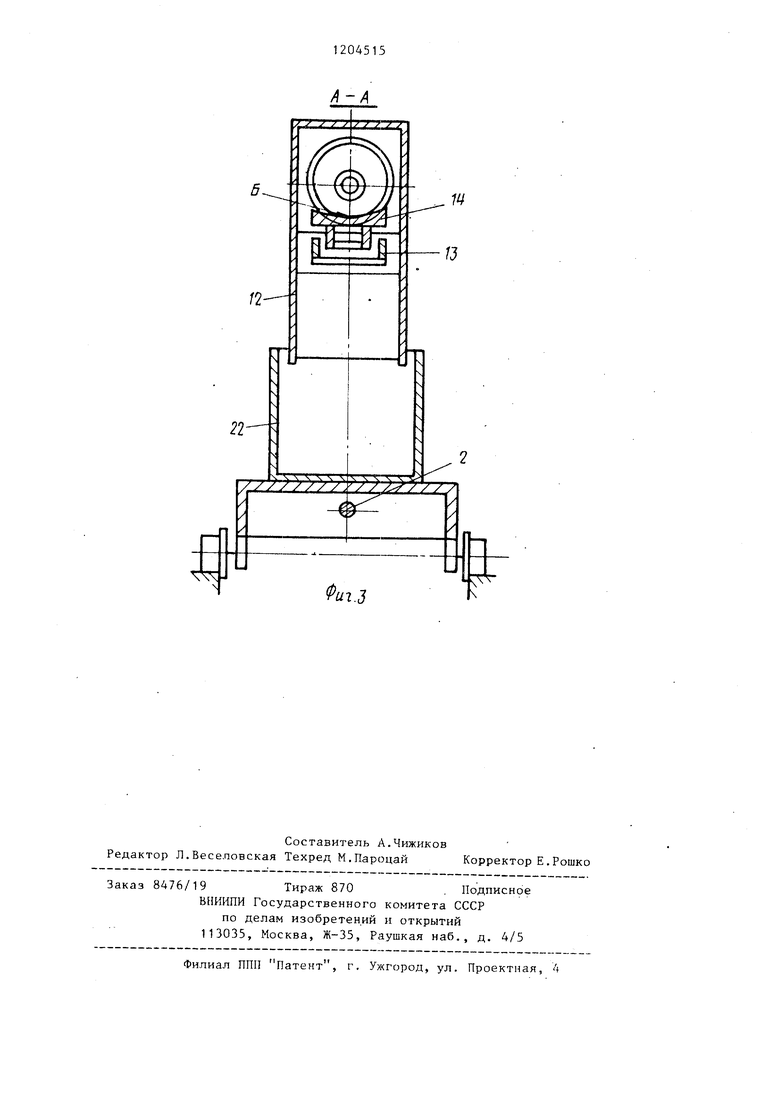
На фиг.1 изображена станция в сотоянии приема калибра из трубы; на фиг.2-то же, в состоянии ввода и отправления калибра в трубу с другого конца трубы ; на фиг.З-разрез А-А н фиг. 1
Станция состоит из подвижной каретки 1, кинематически связанной с приводом перемещения (.не показан) посредством тяги 2, установленной в направляющих каретки 1 и подпружиненной относительно нее в направлении рабочего хода каретки 1 пружиной 3. На каретке 1 в направляющих установлен корпус 5 с возможностью регулировки по высоте посредством упорного винта 6, а на корпусе 5 смонтированы тормозной механизм с приспособлением для подвода сжатого воздуха, который представляет собой пневмоцилиндр 7 одностороннего действия с поршнем 8, выполненным в виде золотника с продольными и поперечными каналами, полым штоком 9 и регулируемыми каналами 10 и 11 для подвода сжатого воздуха. На корпусе 5 также закреплены кожух 12, лот .ки 13 и 14 с призматической или дугообразной рабочей поверхностью Б, смонтированные соответс твенно на рычагах 15 и 16, шарнирно установленных в корпусе 5 на осях 17 и подпружиненных относительно него пружинами 18 и 19. Рычаг 15 снабжен подпружиненной защелкой 20. Рабочая поверхность корпуса 5 облицована накладкой 21 из упругого материала, снабжена емкостью 22 для сбора мусора, содержащегося в отработанной среде. Станция снабжена датчиком 23 состояния приема калибра 24 и датчиком 25 состояния ввода и отправления калибра 24, взаимодействующим
с тягой 2, установленными на каретке 1, а также, датчиком 26 наличия калибра 24 на лотках 13 и 14.
Станция работает следующим образом.
Станция попеременно служит для приема и для отправления калибра 24, В исходном положении станция отведена за габарит контролируемой трубы 27, при этом корпус 5 настроен
по высоте посредством винта 6 таким образом, что рабочие поверхности Б лотков 13 и 14 совпадают с внутренним диаметром трубы 27.
При работе станции в качестве
приемной шток 9 пневмоцилиндра 7 выдвинут, каретка 1 посредством тя- ги 2 перемещается к торцу трубы 27 и останавливается по сигналу датчика 23, не доезжая лотками 13 и 14 и
защелкой 20 до торца трубы. Калибр 24, вылетая из трубы 27, попадает в полость кожуха 12 на лотки 13 и 14 и тормозится тормозным механизмом и упругой накладкой 21, утапливая шток 9, а мусор, вылетающий из трубы, просыпается в емкость 22. Датчик 26 фиксирует наличие калибра на лотках 13 и 14, и каретка 1 возвращается на исходную позицию.
При работе станции в качестве отправочной в полость пневмоцилиндра7 через канал 10 подается сжатый воздух, порщень 8 выдвигает шток 9 вперед, подвигая калибр 24, находящийся на лотках 13 и 14 до защелки 20, таК|что передний его край свисает с
31
лотка 13. илагодаря форме рабочей поверхности Б лотков 13 и 14, калибр 24 сцентрирован относительно контролируемой трубы 27, Датчик 26 наличия калибра на лотках 13 и 14 блоки- рует работу датчика 23, и каретка 1 перемещается в сторону трубы 27 до упора корпуса 5 накладкой 21 в торец трубы, при этом защелка 20, а также лотки 13 и 14 на рычагах 15 и 16, сжимая пружины 18 и 19, последовательно утапливаются под трубу, а калибр 24, подпираемый штоком 9, сначала передней частью,а затем полностью заходит внутрь трубы 27. Тя- га 2 сжимает пружину 3, обеспечивая плотное примыкание корпуса 5 к тор154
ДУ трубы, срабатывает датчик 25 ввода и отправления калибра 24, че рез канал 11 и каналы в поршне 8 и штоке 9 в трубу 27 подается сжатый воздух. Калибр 24 перемещается вдоль трубы 27 к противоположному торцу ее, производя контроль проходного сечения. Станция возвращается в исходное положение при срабатывании датчика 26 в приемной станции на противоположном торце трубы.
При переходе на контроль труб другого диаметра или толщины стенки меняется калибр и производится настройка корпуса 5 с лотками 13 и 14 по высоте посредством упорного винта 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ | 2018 |
|
RU2683036C1 |
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ СКРЕПЛЕНИЙ | 1997 |
|
RU2126474C1 |
| Устройство для термической обрезки конца трубы | 1980 |
|
SU967707A1 |
| Отправочная станция установки для пневмотранспорта штучных грузов | 1977 |
|
SU775026A2 |
| Устройство для установки заготовок в пресс | 1988 |
|
SU1523233A1 |
| УСТРОЙСТВО ПОГРУЗКИ-ВЫГРУЗКИ ГРУЗА НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2010 |
|
RU2422319C1 |
| Устройство для захвата изделий | 1980 |
|
SU944945A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Приемно-отправочная станция однотрубной установки пневмопочты | 1990 |
|
SU1794824A1 |

10
Put. 2
| 1972 |
|
SU410836A1 | |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
