1
Изобретение относится к станкостроению и может быть применено в гидрокопировальных системах фрезерных станков.
Известны копировальные устройства, включающие синусный распределитель, соединенный с цилиндрами, обеспечивающими перемещение по координатам X и У и механизм управления щупом, контактирующим с копиром.
Известные устройства не обладают достаточно высоким быстродействием, т. е. не обеспечивают высокой точности копирования при относительно высоких скоростях обхода контура, а в некоторых случаях, при высоких скоростях, щуп открывается от копира и процесс обработки прекраща-/ ется. Описанный недостаток связан с значительным числом подвижных деталей, обеспечивающих работу устройства, обладающих инерцией и влияющих на производительность обработки. Кроме того, устройство сложно в изготовлении.
С целью повыщения производительности и упрощения конструкции, механизм управления щупом в описываемом устройстве выполнен в виде подпружиненного к копиру и контактирующего с ним фрикционного элемента, установленного с возможностью вращения вокруг оси, совпадающей с осью щупа.
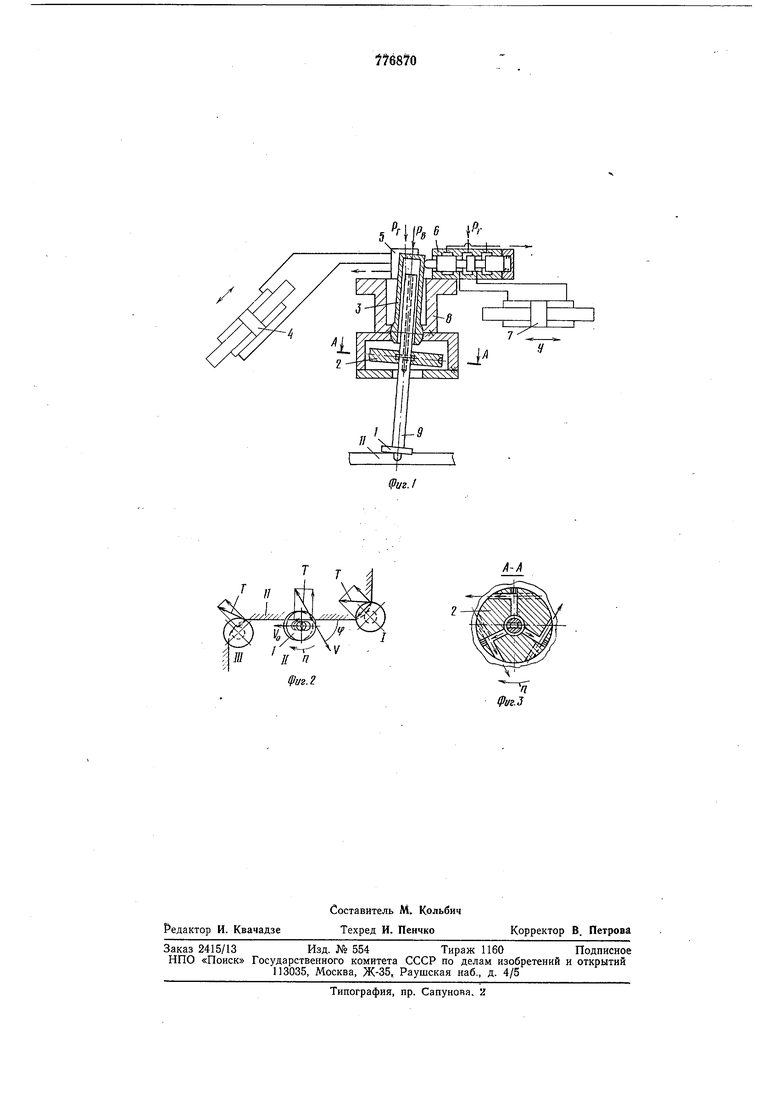
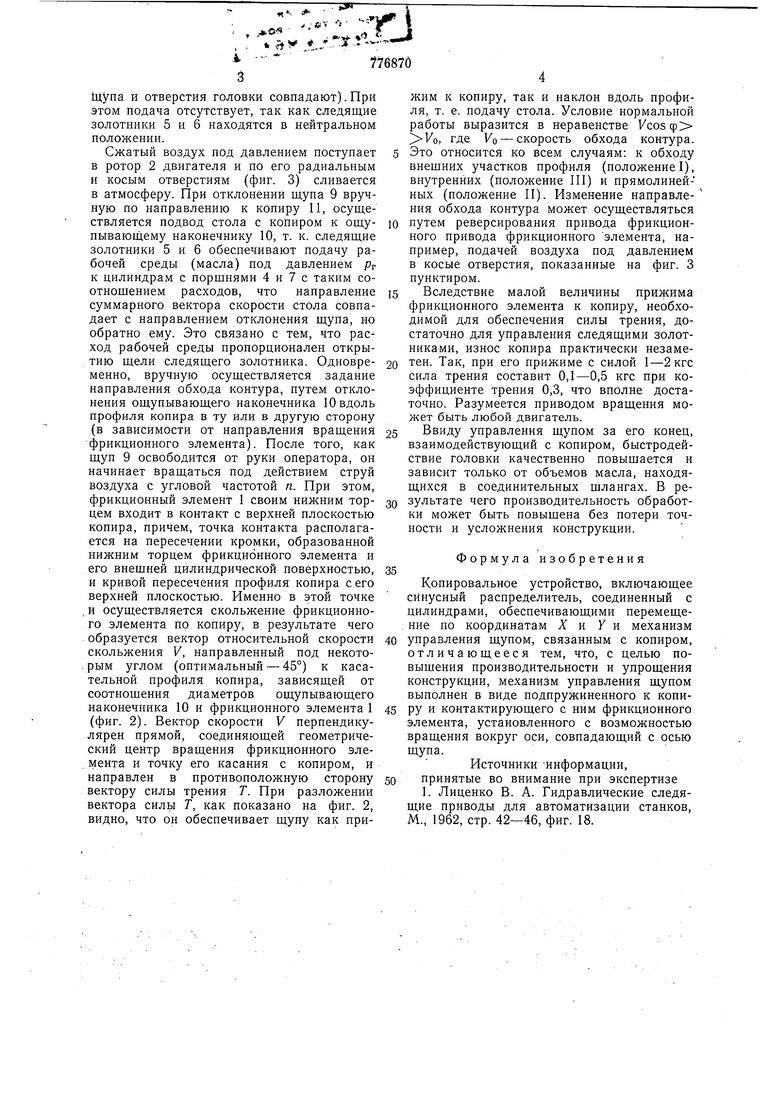
На фиг. 1 изображен продольный разрез устройства; на фиг. 2 - схема действия сил, воздействующих на щуп при обходе контура копира на его внешнем (положение I), 5 прямолинейном (положение II) и внутреннем (положение 1П) участках; на фиг. 3- разрез Б-Б фиг. 1.
Устройство содержит торцовый фрикционный элемент 1, ротор 2 двигателя привода вращения торцевого элемента, подщипник скольжения 3, выполненный за одно целое с цилиндром поджима фрикционного элемента, цилиндр с порщнем 4, обеспечивающий перемещение крестового стола (на
15 чертеже не показан) по координате (Х, управляемый следящим золотником 5, следящий золотник 6, управляющий порщнем 7 цилиндра, обеспечивающим, в свою очередь, перемещение крестового стола по
20 координате У, корпус 8, в котором монтируются все элементы устройства, щуп 9, на конце которого установлен ощупываемый наконечник 10, контактирующий с копиром 11.
25 Гидрокопировальная головка работает следующим образом.
При подаче сжатого воздуха под давлением РВ в цилиндровую полость подщипника 3 щуп 9 занимает нижнее положение,
30 а его ось вертикальна (геометрические оси
г;. -
.о
.-S-,.-- й щупа и отверстия головки совпадают). При этом подача отсутствует, так как следящие золотники 5 и 6 находятся в нейтральном положении. Сжатый воздух под давлением поступает в ротор 2 двигателя и по его радиальным и косым отверстиям (фиг. 3) сливается в атмосферу. При отклонении щупа 9 вручную по направлению к копиру 11, осуществляется подвод стола с копиром к ощупываюпд,ему наконечнику 10, т. к. следящие золотники 5 и 6 обеспечивают подачу рабочей среды (масла) под давлением рг к цилиндрам с поршнями 4 и 7 с таким соотношением расходов, что направление суммарного вектора скорости стола совпадает с направлением отклонения щупа, но обратно ему. Это связано с тем, что расход рабочей среды пропорционален открытию щели следящего золотника. Одновременно, вручную осуществляется задание направления обхода контура, путем отклонения ощупывающего наконечника 10 вдоль профиля копира в ту или в другую сторону (в зависимости от направления вращения фрикционного элемента). После того, как щуп 9 освободится от руки оператора, он начинает вращаться под действием струй воздуха с угловой частотой п. При этом, фрикционный элемент 1 своим нижним торцем входит в контакт с верхней плоскостью копира, причем, точка контакта располагается на пересечении кромки, образованной нижним торцем фрикционного элемента и его внешней цилиндрической поверхностью, и кривой пересечения профиля копира сего верхней плоскостью. Именно в этой точке , и осуществляется скольжение фрикционного элемента по копиру, в результате чего образуется вектор относительной скорости скольжения V, направленный под некото. рым углом (оптимальный - 45°) к касательной профиля копира, зависящей от соотношения диаметров ощупывающего наконечника 10 и фрикционного элемента 1 (фиг. 2). Вектор скорости V перпендикулярен прямой, соединяющей геометрический центр вращения фрикционного эле. мента н точку его касания с копиром, и направлен в противоположную сторону вектору силы трения Т. При разложении вектора силы Т, как показано на фиг. 2, видно, что он обеспечивает щупу как при776870жим к копиру, так и наклон вдоль профиля, т. е. подачу стола. Условие нормальной работы выразится в неравенстве Vcos ф УО, где УО - скорость обхода контура. Это относится ко всем случаям: к обходу внешних участков профиля (положение), внутренних (положение III) и прямолинейных (положение П). Изменение направлеПИЯ обхода контура может осуществляться путем реверсирования привода фрикционного привода фрикционного элемента, например, подачей воздуха под давлением в косые отверстия, показанные на фиг. 3 пунктиром. Вследствие малой величины прижима фрикционного элемента к копиру, необходимой для обеспечения силы трения, достаточно для управления следящими золотниками, износ копира практически незаметен. Так, при его прижиме с силой 1-2 кгс сила трения составит 0,1-0,5 кгс при коэффициенте трения 0,3, что вполне достаточно. Разумеется приводом вращения может быть любой двигатель. Ввиду управления щупом за его конец, взаимодействующий с копиром, быстродействие головки качественно повышается и зависит только от объемов масла, находящихся в соединительных шлангах. В результате чего производительность обработки может быть повышена без потери точности и усложнения конструкции. Формула изобретения Копировальное устройство, включающее синусный распределитель, соединенный с цилиндрами, обеспечивающими перемещение по координатам X к Y vi механизм управления щупом, связанным с копиром, отличающееся тем, что, с целью повышения производительности и упрощения конструкции, механизм управления щупом выполнен в виде подпружиненного к копиру и контактирующего с ним фрикционного элемента, установленного с возможностью вращения вокруг оси, совпадающий с осью щупа. Источники -информации, принятые во внимание при экспертизе 1. Лиценко В. А. Гидравлические следящие приводы для автоматизации станков, М., 1962, стр. 42-46, фиг. 18.
Л 6 РГ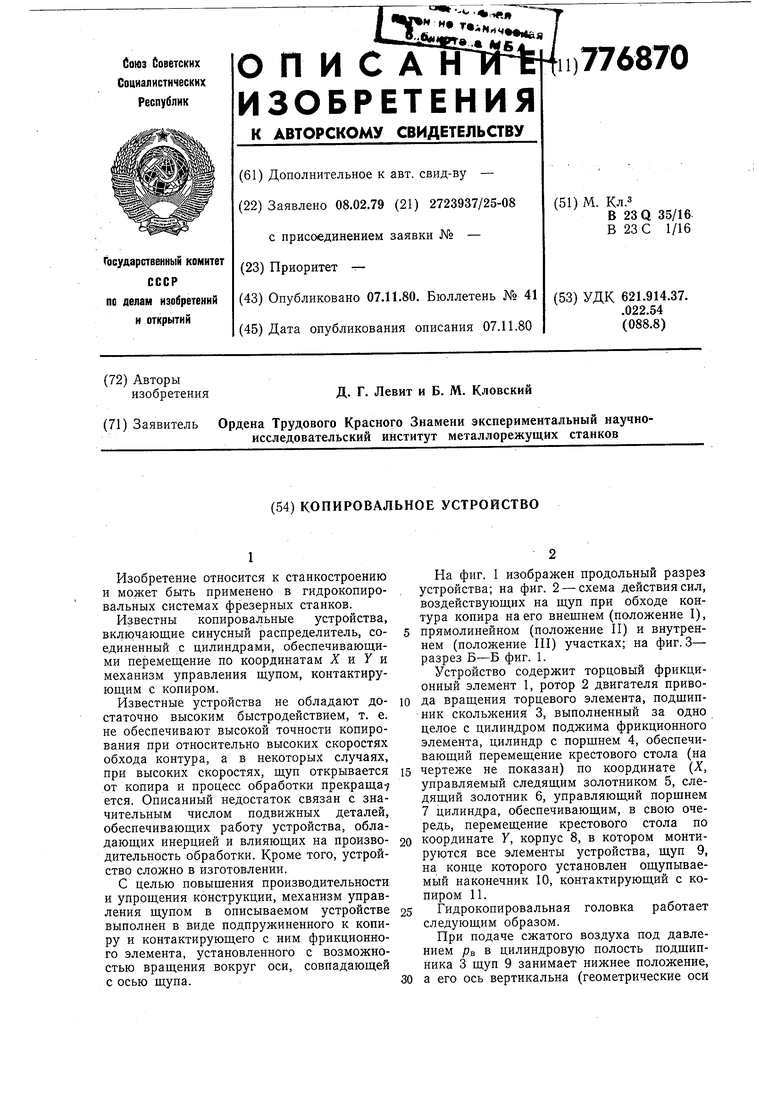
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического слежения по замкнутому контуру | 1979 |
|
SU772749A1 |
| Гидрокопировальный механизм | 1979 |
|
SU837768A1 |
| Гидрокопировальная система | 1984 |
|
SU1237384A1 |
| Гидрокопировальный механизм | 1982 |
|
SU1057246A2 |
| Копировальное устройство для металлорежущихСТАНКОВ | 1979 |
|
SU837767A1 |
| Гидрокопировальный механизм | 1980 |
|
SU918027A1 |
| Гидравлическое копировальное устройство | 1980 |
|
SU897473A1 |
| ГИДРОКОПИРОВАЛЬНЫЙ ПОПЕРЕЧНО-СТРОГАЛЬНЫЙСТАНОК | 1969 |
|
SU245518A1 |
| ГИДРОКОПИРОВАЛЬНАЯ БАБКА | 1971 |
|
SU295612A1 |
| Гидравлическая копировальная система | 1980 |
|
SU882726A1 |