(54) ГИДРОКОПИРОВАЛЬНЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрокопировальный механизм | 1980 |
|
SU918027A1 |
| Гидрокопировальная система | 1984 |
|
SU1237384A1 |
| Устройство для автоматического слежения по замкнутому контуру | 1979 |
|
SU772749A1 |
| Копировальное устройство | 1979 |
|
SU776870A1 |
| Гидрокопировальный механизм | 1982 |
|
SU1077761A2 |
| Гидрокопировальный механизм | 1982 |
|
SU1057246A2 |
| Гидрокопировальный механизм | 1982 |
|
SU1017468A2 |
| Устройство для настройки следящего золотника на размер обрабатываемой детали | 1980 |
|
SU889386A1 |
| Гидрокопировальный механизм | 1982 |
|
SU1017467A2 |
| Гидростатическая опора | 1979 |
|
SU821793A1 |
Изобретение относится к станкостроению и может быть использовано в гидрокопировальных системах станков. Известны гидрокопировальные механ мы, содержащие синусные распределите ли с датчиками рассогласования и механизмами управления положением распределителей , обеспечивагацие силовой прижим щупа к контуру силой, направленной приблизительно под углом 45° к направлению обхода контура l . Однако ввиду значительного числа подвижных деталей, содержащихся в приборах, сухого трения в подвижных стыках, а также весьма грубым соблюдением условия образования угла 45 между силой прижима щупа к копиру и направлением обхода контура, копировальньге приборы не обладают достаточ ными точностью копирования, быстродействием (при высоких скоростях обхода контура щуп отрывается от копира) и простотой. Наиболее близким к изобретению яв ляется гидрокопировальный механизм с пневматическим управлением положения щупа и наличием весьма точного датчика уела положения силы прижима по отношению к направлению обхода контура. Данное устройство обеспечивает копирование по трем координатам (третья - вертикальная) и может обеспечивать наряду с высокими скоростями копирования низкие вследствие повышенной чувствительности ощупывающего устройства, так как наклон щупа, от которого зависит скорость, может быть крайне мал (и1«ется ввиду угол, образованный геометрическими осями щупа и отверстия, в котором он расположен), хотя при этом элемент сопло-заслонка достаточно чувствителен, чтобы определить его положе-. ние f2j . Однако в этом гидрокопировальном механизме есть много подвижных элементов и стыков с сухим трением. В частности сферические универсальные шарниры, обеспечивающие подвеску щупа и передачу усилия jHa следящие золотники, трение в управлякщем про.порционсшьном клапане, не позволяют получить достаточно высокую чувствительность прибора в целом. Кроме того, инерционность управляющего элемента (гидромотора) также снижает динамическую точность при копировании. Механизм весьма сложен в изготовлении и требует.дополнительной управляющей сложной систелы, обесле-
чивающей обратную связь по угловому иодожению силы прижима щупа к контуру копира.
Цель изобретения - повышение точности копировального прибора, упрощение его конструкции, повыиение надежности работы.
Указанная цель достигается тем, что в из.вестном гидрокопировальном приборе на поверхности цапфы щупа, сопряженной с корпусом и образующей с ней зазор i, порядка 0,1 мм), выполнены два ряда карманов с диаметрально противоположным, попарным соединением, а датчик выполнен в виде двух рядов сопел, каждый из которых расположен по разные стороны плоскости качания щупа, один из которых соединен через гидравлические сопротивления, образованные поверхностями цапфы щупа и отверстия корпуса, с источником давления и с карманами, а другой - с карманами и через гидравлические сопротивления, также образованые поверхностями цапфы щупа и отверстия корпуса, со сливом, причем оси симметрии сопел и карманов сдвинуты между собой на некоторый угол.
Кроме того, поверхность щупа, сопряженная с корпусом, может быть выполнена лвоякоконусной, величина конуса не должна превышать величину 1:10, причем оба конуса имеют большее общее основание, совпадающее с плоскостью качания щупа.
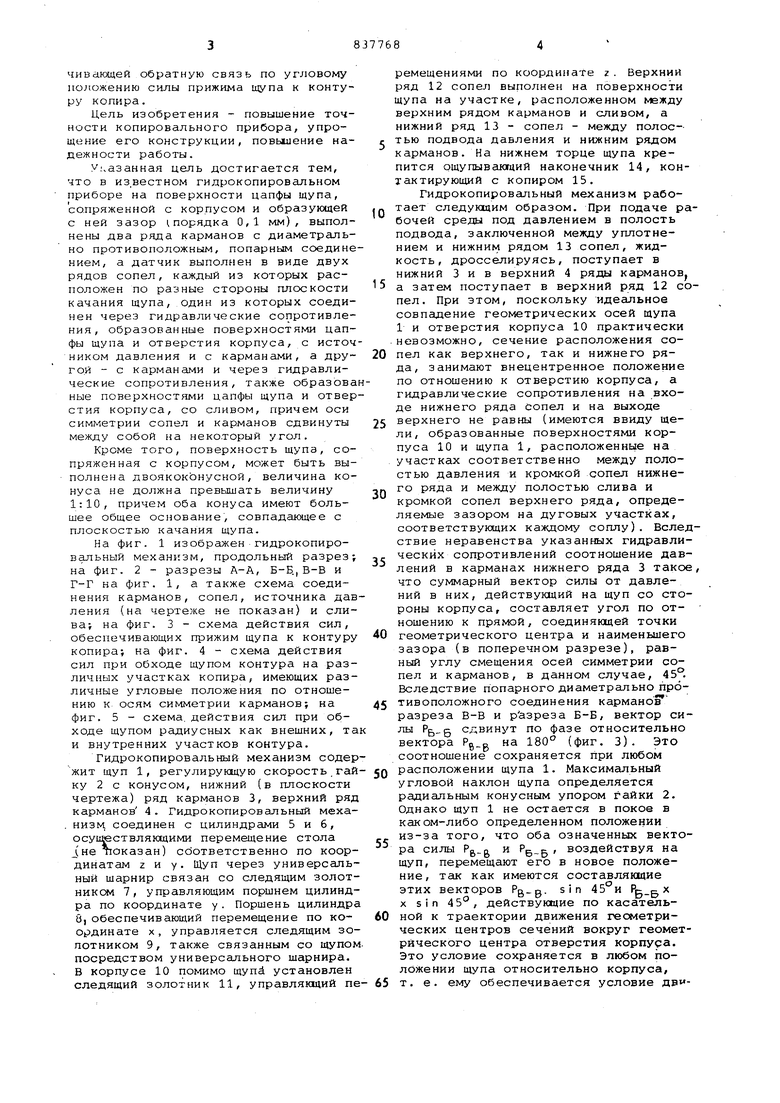
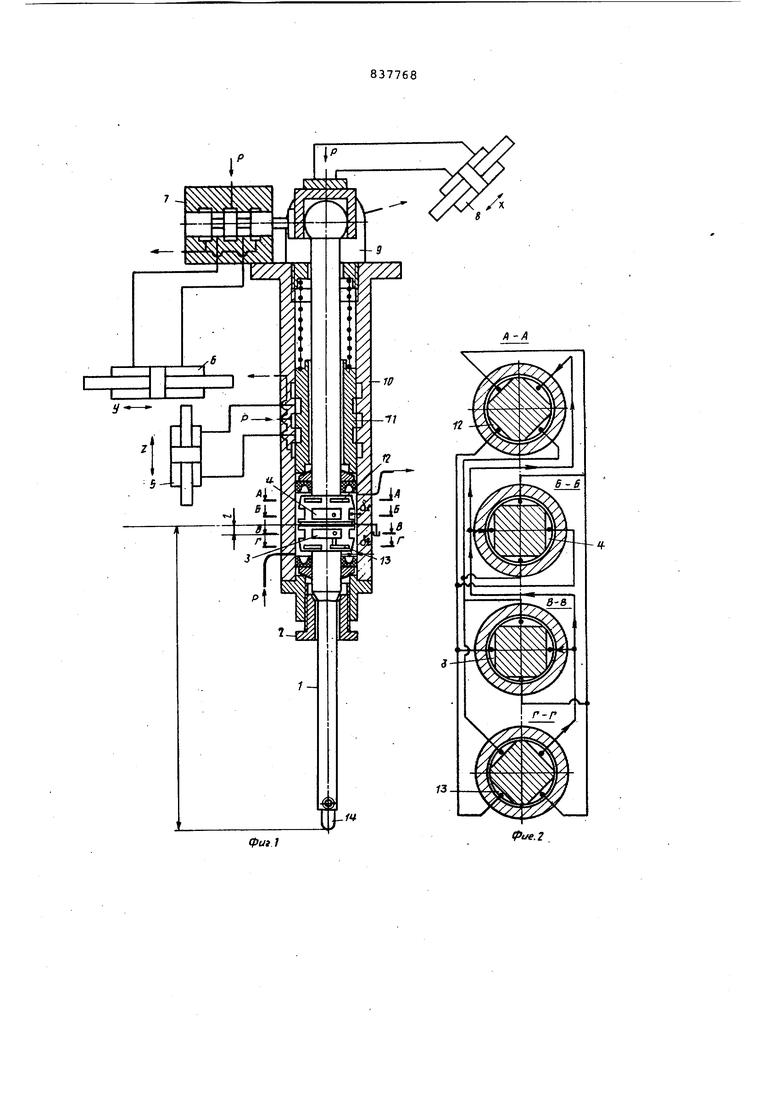
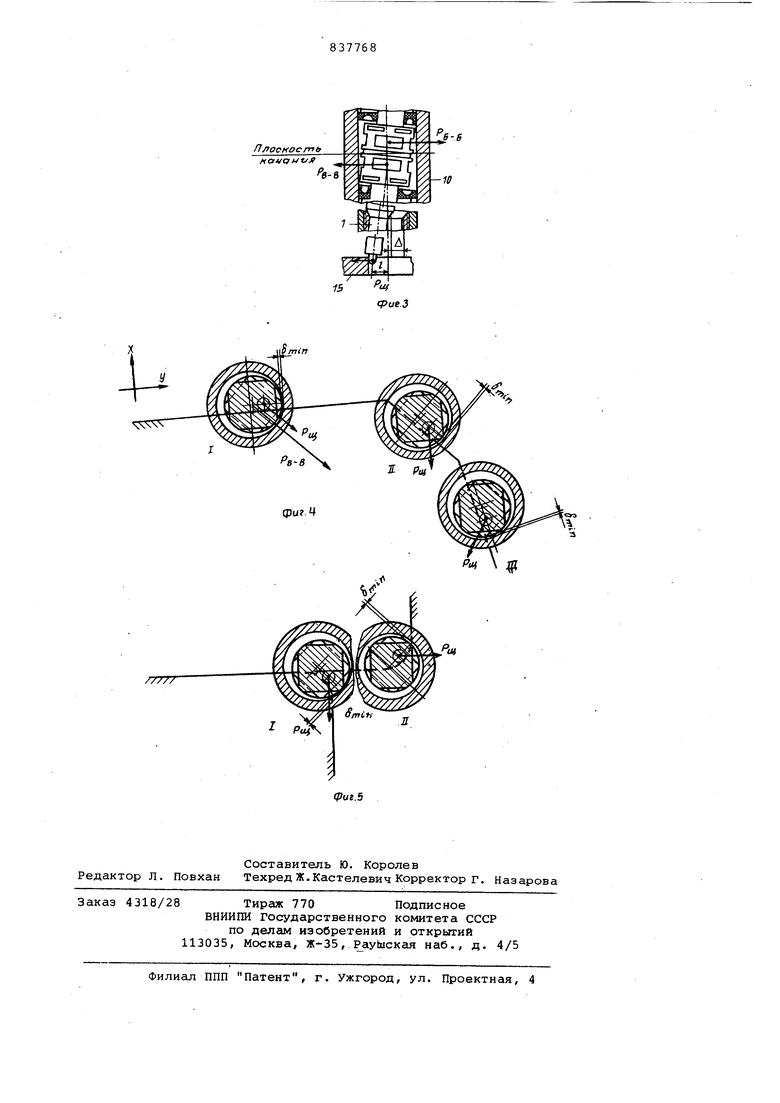
На фиг. 1 изображен гидрокопировальный механизм, продольный разрез; на фиг. 2 - разрезы А-А, Б-Б., В-В и Г-Г на фиг. 1, а также схема соединения карманов, сопел, источника давления (на чертеже не показан) и слива-, на фиг. 3 - схема действия сил, обеспечивающих прижим щупа к контуру копира; на фиг. 4 - схема действия сил при обходе щупом контура на различных участках копира, имеющих различные угловые положения по отношению к осям симметрии карманов; на фиг. 5 - схема, действия сил при обходе щупом радиусных как внешних, та и внутренних участков контура.
Гидрокопировальный механизм содержит щуп 1, регулирующую скорость,гайку 2 с конусом, нижний (в плоскости чертежа) ряд карманов 3, верхний ряд карманов 4 . Гидрокопировальный меха. низм соединен с цилиндрами 5 и б, осуцюствляющими перемещение стола (не показан) соответственно по координатам Z и у. Щуп через универсальный шарнир связан со следящим золотником 7, управляющим поршнем цилиндра по координате у. Поршень цилиндра 8, обеспечивающий перемещение по координате X, управляется следящим золотником 9, также связанным со щупом посредством универсального шарнира, В корпусе 10 помимо щупе, установлен следящий золотник 11, управлягаций перемещениями по координате z. Верхний ряд 12 сопел выполнен на поверхности щупа на участке, расположенном между верхним рядом карманов и сливом, а нижний ряд 13 - сопел - между полостью подвода давления и нижним рядом карманов. На нижнем торце щупа крепится ощупываюгций наконечник 14, контактирующий с копиром 15.
Гидрокопировальный механизм работает следующим образом. При подаче рабочей среды под давлением в полость подвода, заключенной между уплотнением и нижним рядом 13 сопел, жидкость, дросселируясь, поступает в нижний 3 и в верхний 4 ряды карманов а затем поступает в верхний ряд 12 сопел. При этом, поскольку идеальное совпадение геометрических осей щупа 1 и отверстия корпуса 10 практически невозможно, сечение расположения сопел как верхнего, так и нижнего ряда, занимают внецентренное положение по отношению к отверстию корпуса, а гидравлические сопротивления на входе нижнего ряда Сопел и на выходе верхнего не равны (имеются ввиду щели, образованные поверхностями корпуса 10 и щупа 1, расположенные на участках соответственно между полостью давления и кромкой сопел нижнего ряда и между полостью слива и кромкой сопел верхнего ряда, определяемые зазором на дуговых участках, соответствующих каждому соплу). Вследствие неравенства указанных гидравлических сопротивлений соотношение давлений в карманах нижнего ряда 3 такое что суммарный вектор силы от давлений в них, действующий на щуп со стороны корпуса, составляет угол по отношению к прямой, соединягадей точки геометрического центра и наименьшего зазора (в поперечном разрезе), равный углу смещения осей симметрии сопел и карманов, в данном случае, 454 Вследствие попарного диаметрально противоположного соединения карманов разреза В-В и разреза Б-Б, вектор силы сдвинут по фазе относительно вектора на 180° (фиг. 3). Это соотношение сохраняется при любом расположении щупа 1. Максимальный угловой наклон щупа определяется радиальным конусным упором гайки 2. Однако щуп 1 не остается в покое в каком-либо определенном положении из-за того, что оба означенных вектора силы и Pg.g г воздействуя на щуп, перемещают его в новое положение, так как имеются составляющие этих векторов Pg-g. sin 45°и Pg.g х X sin 45-, действукадие по касательной к траектории движения геометрических центров сечений вокруг геометрического центра отверстия корпуса. Это условие сохраняется в любом положении щупа относительно корпуса, т. е. ему обеспечивается условие дв жения. Движение геометрической оси щупа описывает два конуса с общей ве шиной, совпадагадей с пересечением геометрических осей щупа и отверстия корпуса, лежащей на равном расстояни от разрезов верхнего и нижнего ря да карманов. Плоскость, расположеннг1я между этими разрезс1ми, проходящая через вершину конусов и поперечуосекущая гидрокопировальный механиз может быть названа плоскостью качания щупа. Одним из важных свойств данной компоновки является то, что п мере удаления поперечных сечений щупа от плоскости качания (как в ту, так и в другую сторону), круговая ам плитуда качания геометрической оси щупа увеличивается, а усилие уменьшается. Таким образом, перемещение в зоне карманов крайне мало, так как радиальный привод микроперемещений с использованием гидростатического под шипника требует малых зазоров и малых перемещений. Кроме того, при относительно высоких величинах векторов сил и Pg.R усилие прижатия щупа к контуру копира может быть уменьшено в L/I раз. При реальном соотношении L/ 1 20 и при величине радиал ного зазора в разрезе В-В, равном 0,025мм максимальная величина амплитуды сяцупываемого наконечника составляет 0,5 мм также как и на конце щупа, где установлен универсальный шарнир, т. е максимальное перемещение следящих золотников составляет 0,5 мм как в ту, так и в другую сторону, что вполне достаточно для получения скорости обхода контура 2 м/мин при рабочем диаметре цилиндров 6 и 8-100 мм, так как она, в свою очередь, пропорциоНсшьна расходу, который определяется величиной щели максимального открытия золотников 7 и 9. Величина вектора силы Pyj прижатия к контуру составляет 1 кГс при Р )/20 PU, 10 кГс ь-ь Подвод щупа к контуру осуществляет ся нажатием на него вручную. Посредством воздействия его на следящие золотники 7 и 9, подающие жидкость под давлением в цилиндры б и 8, обеспечивается перемещение стола (не показан с закрепленным на нем копиром к щупу в направлении, обратном направлению нажатия, вследствие векторного сложения скоростей по координатам х и у, каждая из которой пропорциональнавеличине щели открытия собственного следящего золотника. При касании щупом конуура копира щуп под деиствием тангенциальных составляющих-векsin 45° и PC о sin 45 торов Ра.а. sin 45° и PI ft-ft 3)11 П Гр р. прижимается к контуру копира таким образом, что наименьший зазор cVn-ivi (в разрезе В-В) располагается перед геометрической осью отверстия корпуса 10 по ходу движения щупа по контуру (фиг. 4, положение I). Золотник 9 занимает нейтральное положение, и подача по оси х становится равной нулю, а по оси у - устанавливается пропорциональной открытой щели золотника 7, в свою очередь, определяемой радиальным коническим упором гайки 2 . При переходе от положения I к положению I I (фиг. 4) щуп совершает под действием составляющих векторов sin45 и РБ-Б ° круговое перемещение, опираясь на радиальный упор гайки 2, оказывающее влияние и на следящие золотники 7 и 9, т. е. меняет соотношение расходов в цилиндрах б и 8 до тех пор, пока результирующая скорость подачи стола опять не устанавливается касательной (в частности, параллельной) контуру копира. Наименьший зазор 6mVn и S положении 1, располагается перед геометрической осью отверстия по ходу движения обхода (фиг. 4, положение II). Аналогично и в положении III. При этом вектор силы IPtu.) в любом положении составляет угол 45° к прямой, соединяющей геометрический центр отверстия корпуса и точку наименьшего зазора (, а поскольку данная прямая всегда параллельна касательной к копиру, то и ректор силы Р составляет угол 45° с касательной к контуру копира. Это представлено на фиг. 5, где показан щуп в положениях I и I1, соответствуквдих некоторому мгновенному(Соответственно при обходе выпуклого и вогнутого участков контура копира. Для повышения точности копирования целесообразно выполнять поверхность цапфы щупа, сопряженную с отверстием корпуса, конической в обе стороны от плоскости качания так, чтобы конуса имели общее основание в ней и были обращены друг к другу. Тогда зазор (/ по крс1ям поверхности цапфы щупа, сопряженной с отверстием корпуса, больше зазора как со стороны нижнего ряда 13 сопел, так и со стороны верхнего ряда 12. Подобное выполнение щупа позволяет с большей точностью добиться совпадения геометрических осей отверстия корпуса 10 и щупа 1 при установке золотников в нейтральное положение, так как при завинчивании гг1йки 2 до полной выборки зазора между радиальным коническим упором этой гайки и конической частью щупа 1 величина люфта щупа определяется зазором а(Ц . При выполнении его малым (порядка 5-8 мкм) точность совпадения осей достаточна (в этом положении производится установка корпусов следящих золотников в нейтральное, т. ё. подача при этом равна нулю). Однако столь малая величина зазора при выполнении поверхности щупа, сопряженной с поверхностью отверстия корпуса,- цилиндрической, не может обеспечить достаточную величину круговой амплитуды движения щупа. Поэтому целесообразно выполнят поверхность щупа двоякоконусной. В предлагаемом устройстве в связи с отсутствием элементов, перемещающих щуп, таких как отдельно выполнен ный гидромотор и т. п., а также управляющих им,число подвижных стыков сведено до минимума, а стыков с сухим трением вообще нет. Это в значительной степени повышает точность предлагаемого гидрокопировального прибора также, как и применение в не чувствительного датчика углового положения щупа, одновременно управляющего величиной давлений в карманах и его положением. Подобное выполнение силового и управляющего устройств обеспечивает возможность перемещать щуп, используя малый объем рабочей среды, что позволяет качественно повысить быстродействие, для которого благоприятно отсутствие каких-либо перемещающихся элементов, обладающих значительной инерцией. Точность также достигается точным поддержанием угла между силой прижима щупа к контуру и касательной, проведенной к нему в точке контакта щупа с йопиром Простота конструкции и надежность работы предлагаемого устройства обус ловлены отсутствием промежуточных элементов, управляющей, схемы и органичной встройкой гидромотора и датчи ка в тело щупа. Формула изобретения 1. Гидрокопировальный механизм, содержащий щуп, установленный в корп се, систему управления углом его прижима к копиру с датчиком угла, а также следящие золотники с источником давления, с системой питания, о тличающийся тем, что, с целью повышения точности копирования, упроцения конструкции и повышения надежности его работы, на поверхности цапфы щупа, сопряженной с отверстием корпуса и образующей с ней диаметральный зазор, выполнены два ряда карманов с диаметрально противоположным попарным соединением, а датчик выполнен в виде двух рядов сопел, каждый из которых расположен по разные стороны плоскости качания щупа, один из которых соединен через падравлические сопротивления, образованные поверхностями цапфы щупа и отверстия корпуса, с источником давления и с карманами, а другой - с каЕ 4анами и через гидравлические сопротивления, образованные поверхностями цапфы щупа и отверстия корпуса, со сливом, причем оси симметрии сопел и карманов сдвинуты между собой на не- / который угол. 2. Гидрокопировальный механизм по п. 1, отличающийся тем, что, с целью повышения точности копирования, поверхность щупа, сопряженная с корпусом, выполнена двоякоконусной , величина конуса не превышает 1:10, причем оба конуса имеют общее большее основание, совпадающее с полостью качания щупа. Источники информации, принятые во внимание при экспертизе 1.Лещенко В. А. Гидравлические следящие приводы для автоматизации станков. Машиностроение, М., 1962, с. 42, ф. 18. 2.Пасент США 3620499, кл. 251-3, 1972.
15
/7777
