Изобретение относится к станкостроению и может быть нрименено в станках фрезерной группы для обработки деталей сложной конфигурации по копиру.
Цель изобретения - расширение функцио- нальных возможностей копирования.
Цель достигается за счет осуществления последовательностей обработки в трех взаимно перпендикулярных плоскостях.
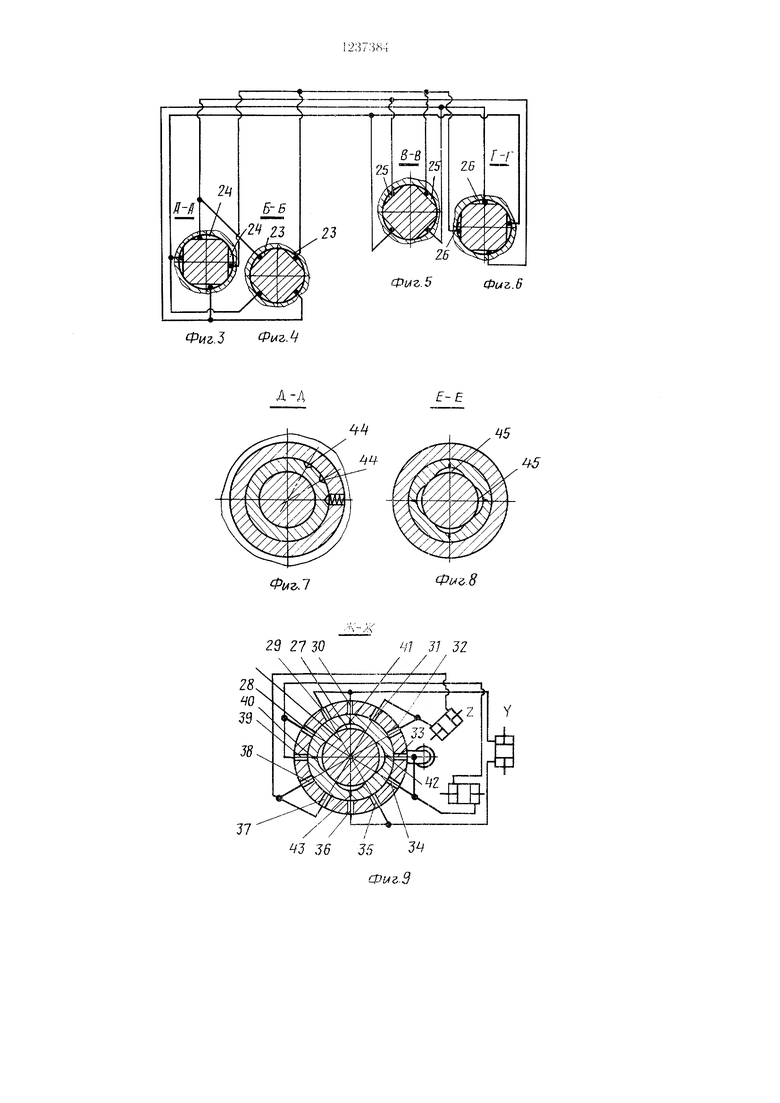
На фиг. 1 изображена схема обработки; на фиг. 2 гидрокопировальный прибор, про- дольный разрез; на фиг. 3-6 - поперечные разрезы гидрокопировального прибора А-А, Б-Б, В-В, Г-Г на фиг. 2 соответственно и связи управляющих сопел и силовых карманов ротора; на фиг. 7 - разрез Д-Д на фиг. 2; на фиг. 8 - разрез Е-Е на фиг. 2; на фиг. 9 - разрез Ж-Ж на фиг. 2; на фиг. 10 - схема копирования плоскости XY. Гидрокопировальная система (фиг. 1), со- .,.ржит гидрокопировальный прибор 1, ось которого расположена по диагонали куба, имеющего грани, параллельные координатным плоскостям XY, XZ, YZ, со щупом 2, контактирующий с копиром 3 посредством сферического наконечника 4. Копир 3 закреплен на крестовом столе, основание 5 которого связано с исполнительным двигателем 6 оси Y, а ползун 7 крестового стола - с исполнительным двигателем 8 оси X. Крестовый стол расположен на направляющих станины 9, а заготовка 10 закреплена на ползуне 7 крестового стола. Фреза 11 установлена в шпинделе фрезерной головки 13, размешенной во фрезерной бабке 13, с которой связан исполнительный двигатель 14 оси Z.
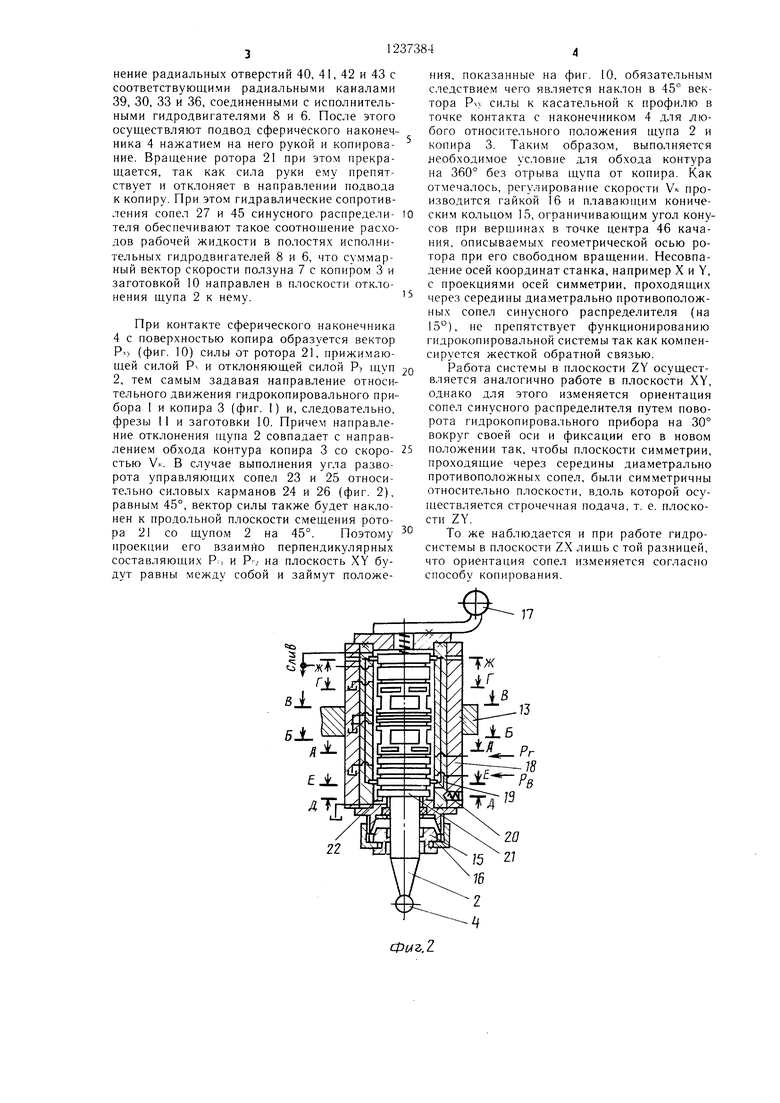
Гидрокопировальный прибор (фиг. 2) содержит плавающее коническое кольцо 15 механизма регулирования скорости, контактирующее с гайкой 16, и рукоятку 17. Во втулке 18, закрепленной во фрезерной бабке 13, установлен корпус 19 (фиг. 10) и фиксирующий механизм 20. Осевой опорой подпружиненного ротора 21, несущего щуп 2, служит гидростатический подпятник 22.
Входные управляющие сопла 23 соединены с соответствующими силовыми карманами 24, а также с выходными управляющими соплами 25 и силовыми карманами 26, выполненными на роторе (фиг. 3, 4, 5 и 6). В корпусе гидрокопировального прибора выполнены выходные сопла 27 (фиг. 9) - один из чувствительных элементов синусного распределителя, а во втулке - радиальные каналы 28-39. В корпусе гидрокопировального прибора выполнены радиальные отверстия 40, 41, 42, и 43, три фиксирующих гнезда 44 (фиг. 7) и входные сопла 45 (фиг. 8) - другие чувствите.тьные сопла синусного распределителя, причем радиальные отверстия 40, 41, 42 и 43 соединены со
Для осуплествления жесткой обратной связи, взаимно перпендикулярные плоскости симметрии чувствительных элементов синусного распределителя (пары сопел - входных 45 и выходных 27), ориентируют симметрично плоскости координат станка, вдоль которой осуществляется строчечная подача, например, оси Z, т. е. поворачивают гидрокопировальный прибор за ручку 17 во втулответственно с выходными 27 и входными 4555 так, чтобы фиксирующий .механизм 20
соплами синусного распределителя.сконтактировал с одним из трех фиксируюРотор гидрокопировального прибора име-щих гнезд 44, как показано на фиг. 2, 7 и 9.
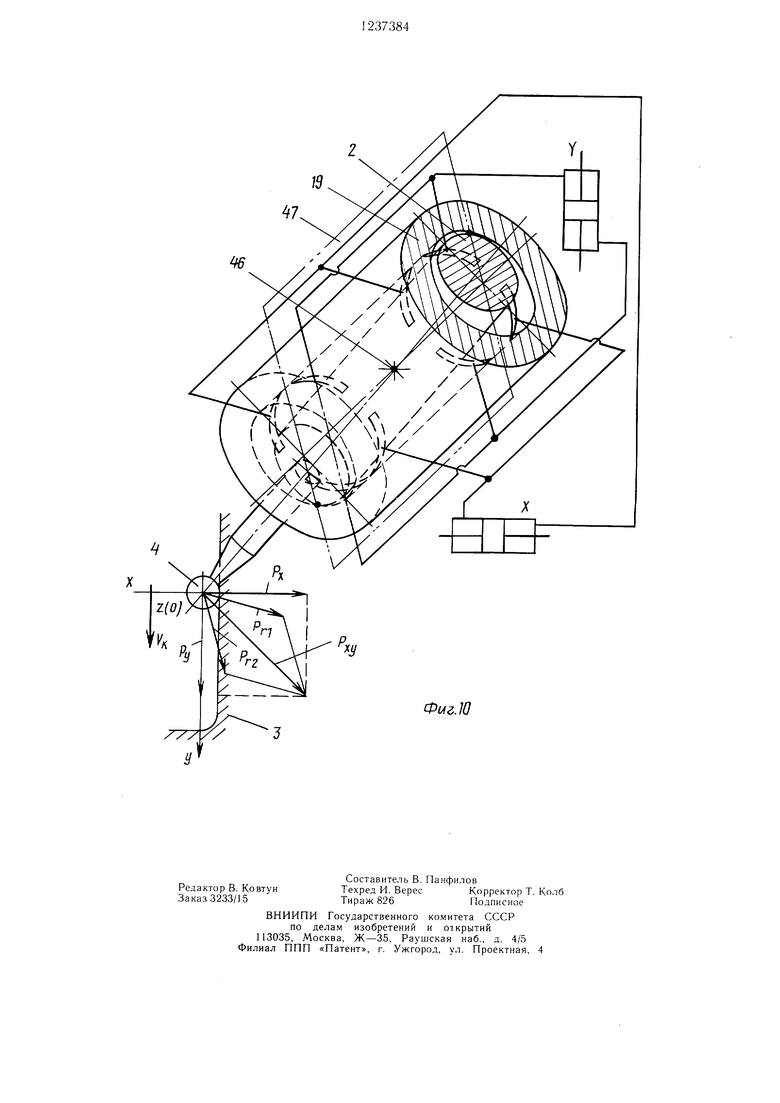
ет геометрический центр 46 качания, какОдновременно с этим осуществляется соеди5
0
0
5
0
5
0
показано на фиг. 10, где также указана плоскость 47, в которой происходит отклонение ротора со щупом при обходе участка профиля, совпадающегося с осью Y при копировании в плоскости XY.
Гидрокопировальная система работает следующим образом.
При подаче рабочей жидкости под давлением Р (фиг. 2) ротор 21 гидрокопировального прибора 1 (фиг. I) со сферическим наконечником 4 начинает соверщать орбитальное движение так, что его геометрическая ось описывает две конические поверхности с вершинами в геометрическом центре 46 качания (фиг. 10) за счет выполнения на роторе 21 двух рядов силовых карманов 24 и 26, соединенных попарно диаметрально противоположно и с управляюпдими рядами входных 23 и выходных 25 сопел, развернутых по отношению к силовым карманам на уг ол, в частности, 45°. Возможность движения ротора 21 обеспечивается гидростатическим подпятником 22, питающимся утечками из кольцевой канавки, к которой подводится рабочая жидкость под давлением Рв, другой поток которой питает входные сопла 45 (фиг. 8). Попарное соединение соответствующих входных 45 и выходных 27 сопел синусного распред1елителя обеспечивает деление расхода в радиальных отверстиях 40, 41, 42 и 43 корпуса 19 в соответствии с законами синуса и косинуса за счет изменения гидравлических сопротивлений между заслонкой (поверхностью ротора 21) и соплами 27 и 45 в зависимости от углового положения ротора 21 в корпусе 19 по мере его вращения. уменьшении угла при вершине конусов, образованных геометрическими осями ротора 21 и корпуса 19 вследствие завинчивания гайки 16 вместе с плавающим коническим кольцом 15 закон изменения расходов по синусу и косинусу сохраняется, однако разность величин расхода рабочей жидкости через противоположные радиальные отверстия 40, 42 и 41, 43 уменьшается. Поскольку расход через соответствующие радиальные каналы, например, 39, 33 и 30, 36 направляется в противоположные плоскости исполнительных гидродвигателей 8 и 6, то суммарный вектор скорости по модулю уменьшается, т. е. осу- лествляется регулирование скорости подачи.
Для осуплествления жесткой обратной связи, взаимно перпендикулярные плоскости симметрии чувствительных элементов синусного распределителя (пары сопел - входных 45 и выходных 27), ориентируют симметрично плоскости координат станка, вдоль которой осуществляется строчечная подача, например, оси Z, т. е. поворачивают гидрокопировальный прибор за ручку 17 во втулнение радиальных отверстий 40, 41, 42 и 43 с соответствующими радиальными каналами 39, 30, 33 и 36, соединенными с исполнительными гидродвигателями 8 и 6. После этого осуществляют подвод сферического наконечника 4 нажатием на него рукой и копирование. Вращение ротора 21 при этом прекращается, так как сила руки ему препятствует и отклоняет в направлении подвода к копиру. При этом гидравлические сопротивления сопел 27 и 45 синусного распределителя обеспечивают такое соотношение расходов рабочей жидкости в полостях исполнительных гидродвигателей 8 и 6, что сум.мар- ный вектор скорости ползуна 7 с копиром 3 и заготовкой 10 направлен в плоскости отклонения щупа 2 к нему.
При контакте сферического наконечника 4 с поверхностью копира образуется вектор Р (фиг. 10) силы от ротора 21, прижимающей силой Рч и отклоняющей силой Р щуп 2, тем самым задавая направление относительного движения гидрокопировального прибора 1 и копира 3 (фиг. 1) и, следовательно, фрезы II и заготовки 10. Причем направление отклонения щупа 2 совпадает с направлением обхода контура копира 3 со скоро- стью VK. В случае выполнения угла разворота управляющих сопел 23 и 25 относительно силовых карманов 24 и 26 (фиг. 2), равным 45°, вектор силы также будет наклонен к продольной плоскости смещения ротора 21 со щупом 2 на 45°. Поэтому проекции его взаимно перпендикулярных составляющих Pri и Рг на плоскость XY будут равны между собой и займут положе
ния, показанные на фиг. 10, обязательным следствием чего является наклон в 45° вектора Рху силы к касательной к профилю в точке контакта с наконечником 4 для любого относительного положения щупа 2 и копира 3. Таким образом, выполняется яеобходимое условие для обхода контура на 360° без отрыва щупа от копира. Как отмечалось, регулирование скорости VK производится гайкой 16 и плавающим коническим кольцом 15, ограничивающим угол конусов нри вершинах в точке центра 46 качания, описываемых геометрической осью ротора при его свободном вращении. Несовпадение осей координат станка, например X и Y, с проекциями осей симметрии, проходящих через середины диаметрально противоположных сопел синусного распределителя (на 15°), не препятствует функционированию 1 идрокопировальной системы так как компенсируется жесткой обратной связью.
Работа системы в плоскости ZY осуществляется аналогично работе в плоскости XY, однако для этого изменяется ориентация сопел синусного распределителя путем поворота гидрокопировального прибора на 30° вокруг своей оси и фиксации его в новом положении так, чтобы плоскости симметрии, проходящие через середины диаметрально противоположных сопел, были симметричны относительно плоскости, вдоль которой осуществляется строчечная подача, т. е. плоскости ZY.
То же наблюдается и при работе гидросистемы в плоскости ZX ,г1ищь с той разницей, что ориентация сопел изменяется сотасно способу копирования.
П
.2
Фиг. в
Фиг.З .
Л-Л
Е-Е
5
Фм2,.1
Ф1.8
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрокопировальный механизм | 1982 |
|
SU1057246A2 |
| Гидрокопировальный механизм | 1980 |
|
SU918027A1 |
| Гидрокопировальный механизм | 1982 |
|
SU1077761A2 |
| Гидрокопировальный механизм | 1979 |
|
SU837768A1 |
| Гидрокопировальный механизм | 1982 |
|
SU1017467A2 |
| Копировальное устройство | 1979 |
|
SU776870A1 |
| Гидрокопировальный механизм | 1982 |
|
SU1017468A2 |
| Устройство для автоматического слежения по замкнутому контуру | 1979 |
|
SU772749A1 |
| Полуавтоматический гидрокопировально-фрезерный станок для обработки лопастей воздушных винтов | 1959 |
|
SU133351A1 |
| Гидрокопировальный фрезерный станок | 1978 |
|
SU768571A1 |

23 2750
V
28 40
/7 J/ 3Z ///.
У
5 36 35 3 Фыг-3
47
.Ю
Редактор В. Ковтун Заказ 3233/15
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Составитель В. Панфилов Техред И. ВересКорректор Т. Колб
Тираж 826Подписное
| Лещенко В | |||
| А | |||
| Гидравлические приводы для автоматизации станков | |||
| М.: Машиностроение, 1962, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Гидрокопировальный механизм | 1980 |
|
SU918027A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
