(54) ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1979 |
|
SU840795A1 |
| Цифровой следящий привод | 1980 |
|
SU941926A1 |
| Цифровая следящая система | 1979 |
|
SU868700A1 |
| Цифровая следящая система | 1974 |
|
SU541143A1 |
| Инкроментный умножитель аналоговых сигналов | 1982 |
|
SU1057970A1 |
| Цифровая следящая система | 1979 |
|
SU890359A2 |
| Инкрементный умножитель аналоговых сигналов | 1983 |
|
SU1113820A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
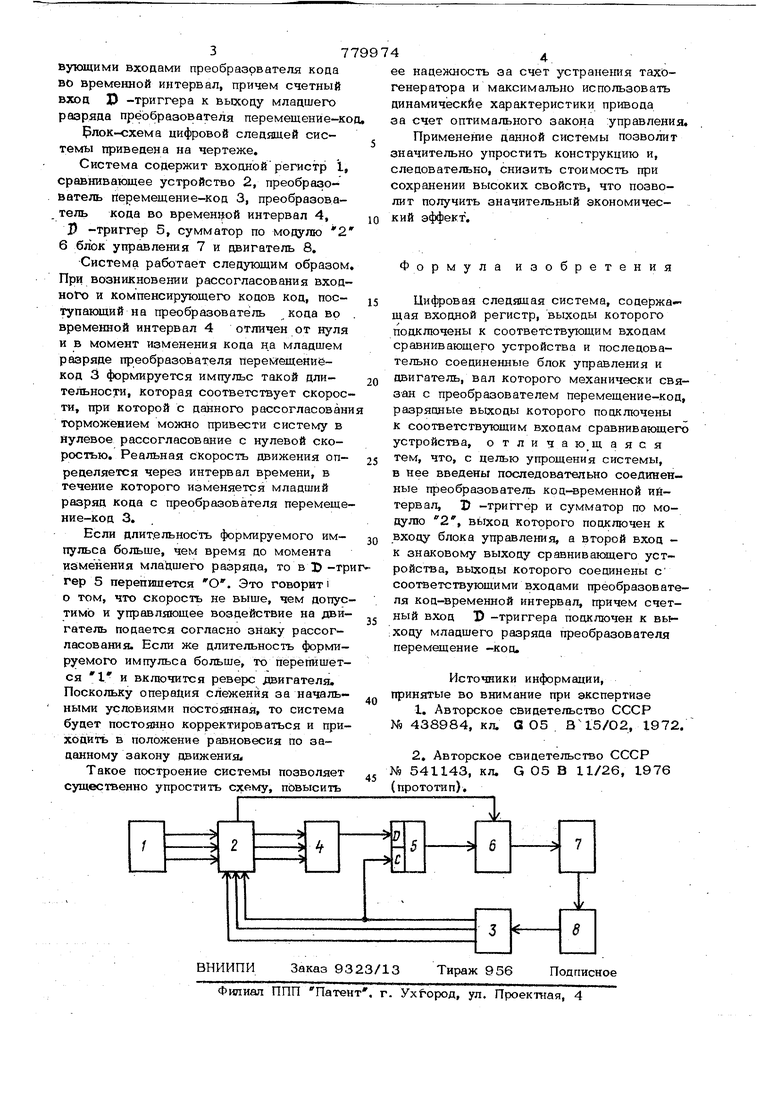
Изобретение относится к области автоматического- управления и может быть использовано цля сопряжения цифровых устройств с аналоговыми исполнительным механизмами. Известна цифровая следящая система 1 , содержащая преобразователь коданалог, блок сравнения кодов, усилитель, управляющий исполнительным двигателем, выходной которого кинематически связан с преобразователем перемещениекод и валом , тахогенератора, выход которого подключен к входу усилителя. Улучшение динамических свойств таких систем обеспечивается подключением обратной связи по скорости с тахогенератора с помощью релейных элементов, управляемых специально выработанным сигналом. Недостатком является сложность, обус ловленная наличием специального датчика для получения скоростного сигнала. Наиболее близкой к изобретению в- i ляется цифровая следящая система 23, содёржшцая входной регистр, вьосодь которого подключены к соответствующим входам сравнивающего устройства и последовательно соединенные блок управления и авйгатёль, вал которого механически связан с преобразователем перемещениекод, разрядные выходы которого поцкяю- чены к соответствующим входам сравнивающего устройства. Основным недостатком данной системы является сложность вследствие наличия тахогенератора для получения сигнала скоростной обратной связи. Целью изобретения является упрощение системы.. Указанная цель достигается тем, что в цифровую следящую систему введены последовательно соединенные преобразо- ватеш кода во временной интервал, а -триггер и сумматор по модулю 2, выход которого подключен к входу блока управления, а второй вход - к знаковому выходу сравнивакнцего устройства, выходы которого соединены с соответсгвующими входами преобразователя кода во временной интервал, причем счетный вход D -триггера к выхоцу младшего разряда преобразователя перемещение-ко рлок-схема цифровой следящей системы приведена на чертеже. Система содержит входнойрегистр 1, сравнивающее устройство 2, преобразователь Перемещение-код 3, преобразователь кода во временной интервал 4, J) -триггер 5, сумматор по модулю 2 6 блок управления 7 и двигатель 8, Система работает следующим образом, При возникновении рассогласования входHotxi и компенсирующего кодов код, поступающий на преобразователь кода во временной интервал 4 отличен от нуля и в момент изменения кода н,а младшем разряде преобразователя перемещениекод 3 формируется импульс такой длительности, которая соответствует скорости, при которой с данного рассогласовани торможением можно привести систему в нулевое рассогласование с нулевой скоростью. Реальная скорость движения определяется через интервал времени, в течение которого изменяется младший разряд кода с преобразователя перемещение-код 3, . Если длительность формируемого импульса больше, чем время до момента изменения младшего разряда, то в D-тр гер 5 перепишется О. Это говорит о том, что скорость не выше, чем допус тимо и управляющее воздействие на двигатель подается согласно знаку рассогласования. Если же длительность формируемого импульса больше, то перепишется 1 и включится реверс двигателя. Поскольку операция слежения за начальными условиями постоянная, то система будет ПОСТО5ШНО корректироваться и приходить в положение равновесия по заданному закону движения, Такое построение системы позволяет существенно упростить схему, повысить е надежность за счет устранения тахоенератора и максимально использовать инамические характеристики привода а счет оптимального закона управления. Применение данной системы позволит начительно упростить конструкцию и, ледовательно, снизить стоимость при охранении высоких свойств, что позволит получить значительный экономический эффект. Формула изобретения Цифровая следящая система, содержа- щая входной регистр, выходы которого подключены к соответствующим входам сравнивающего устройства и последовательно соединенные блок управления и двигатель, вал которого механически связ-ан с преобразователем перемещение-код, разрядные выходы которого подключены к соответствующим входам сравнивающего устройства, отличающаяся тем, что, с целью упрощения системы, в нее введены последовательно соединенные преобразователь коц- ременной ийтервал, D -триггер и сумматор по модулю 2, выход которого подключен к входу блока управления, а второй вход к знаковому выходу сравнивающего устройства, выходы которого соединены с соответствующими входами преобразователя код-временной интервал, причем счетный вход Р -триггера подключен к младшего разряда преобразователя перемещение -код. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 438984, кл, а 05 345/02, 1972. 2,Авторское свидетельство СССР № 541143, кл, G 05 В 11/26, 1976 (прототип).
