механизма поворота и включенные между выходом последнего н входом регулятора тока заристор, операционный усилитель и блок дифференцирования 3.
Недостатком этого устройства является возможность превышения горизонтальной нагрузки на стрелу допустимого значения при повороте экскаватора, особенно при большом удалении ковша от оси вращенг;;: экскаватора, что снижает надежность экскаватора и накладывает ограничение на величину углового ускорения экскаватора, что снижает производительность экскаватора.
Цель изобретения - повышение надежности и производительности экскаватора за счет ограничения горизонтальных нагрузок на стрелу.
Для этого предлагаемое устройство снабжено источни о.м постоянного напряжения, датчиком длины тягового каната, блоком перемножения-деления и диодным мостом с регулируемым источником опорного напряжения, включенным в цепь обратной связи операционного усилителя, выходом соединенного с входом регулятора тока, а к двум входам которого подключен непосредственно и через блок дифференцирования выход блока перемножения-деления, к двум входам пере.множения которого подключены блок определения момента нагрузки механизма поворота и датчик длины тягового каната, а его вход деления соединен через суммирующий элемент с датчиком длины тягового каната и источником постоянного напряжения.
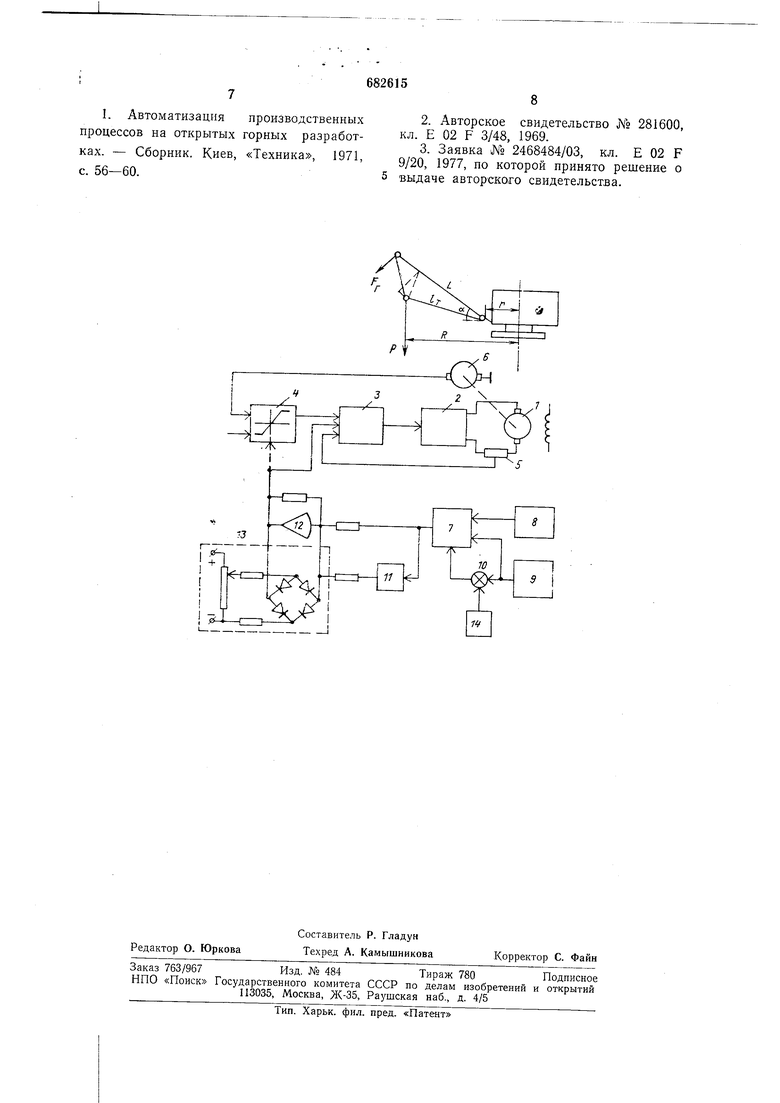
На чертеже изображено предлагаемое устройство.
Двигатель / механизма, поворота питается от преобразователя 2, к входу которого подключены последовательно соединенные регулятор тока 3 и регулятор скорости 4 с подключенными к их входам датчиками тока 5 и скорости 6. В устройство дополнительно введены блок перемножения-деления 7, например, типа МДУ, блок 8 определения момента /W,, нагрузки механизма поворота (например, на основе выделения статического тока), датчик 9 длины тягового каната, элемент суммирования 10, блок дифференцирования //, операционный усилитель 12 с двумя входами и включенным в цепи его обратной связи диодным мостом с регулируемым источником опорного напряжения 75, обеспечивающим задание зоны нечувствительности этого операционного усилителя 12, а также источник постоянного напряжения /4.
Два входа перемножения блока перемножения-деления 7 подключены к выходам блока 8 определения момента нагрузки механизма поворота и датчика 9 ллины тягового каната, а его вход делителя подключен к выходу элемента суммирования 10, к двум входам которого подключены выходы датчика 9 длины тягового каната и источника постоянного напряжения М, выходной сигнал которого пропорционален расстоянию г блоков тяги у основания стрелы от оси вращения экскаватора. Выход блока 7 перемножения деления подключен непосредственно и через блок дифференцирования // к двум входам операционного усилителя 12, выход которого соедИНен с входом регулятора тока 3.
Выход операционного усилителя 12 может быть подключен также на вход изменения ограничения выходного напряжения регулятора скорости 4 (показано пунктиром).
Работа устройства основана на введении контроля и эффективного ограничения горизонтальной нагрузки F,. на стрелу, вызываемой отклонением ковша от вертикальной плоскости в процессе разгона реверса и торможения механизма поворорота и определяемой здесь из выражения:
ir
Lcos
(1)
/ 7, Ч
где R - радиус инерции ковша относительно оси вращения экскаватора;
L, а - длина стрелы и угол ее наклона к горизонту.
Указанная нагрузка является расчетной для стрелы, а отсутствие контроля и ограничения этой нагрузки определяет наиболее существенное ограничение на возможность увеличения ускорения механизма поворота, а вместе с тем и на производительность экскаватора.
При этом в устройстве используется вторая зависимость из приведенного выражения, которая является приближенной, но более простой для реализации, и в которой вместо информации о радиусе R инерции ковша используется информация о длине тягового каната /т, что, однако, не .вызывает существенной погрешности.
При горизонтальном направлении тягового каната эта замена переменных не приводит к появлению ошибки. Отклонение от горизонтального направления тягового каната хотя и вызывает появление ошибки, однако, как показал анализ, при максимальном радиусе инерции ковша, наиболее опасном с точки зрения возможности возникновения больших горизонтальных нагрузок на стрелу, эта ошибка не превышает 1,3%. При уменьшении радиуса инерции ковша эта ошибка может возрасти до 4-5%, однако, во-первых, такая величина ошибки вполне приемлема для практики, во-вторых, сама величина нагрузки при этом уменьшается, что уменьшает опасность превышения его допустимой величины.
Такая замена позволяет исключить необходимость определения радиуса инерции ковша и тем самым упростить устройство.
В соответствии с указанной зависимостью сигнал на выходе блока 7 перемножения-деления пропорционален величине горизонтальной нагрузки па стрелу Ff , поскольку на его входы перемножения поступают сигналы, пропорциональные величине момента М„ нагрузки механизма поворота с выхода блока 8 и длине тягового каната /т с выхода датчика 9 этой длины, а на его вход делителя поступает сигнал с выхода элемента суммирования 10, пропорциональный величине (/т + ).
С помошью регулируемого источника опорного напряжения диодного моста 13 задается зона нечувствительности операционного усилителя 12, пропорциональная допустимому значению горизонтальной нагрузки на стрелу ,
Если в процессе транспортировки козша выходной сигнал блока 7 перемножения-деления превышает величину зоны нечувствительности операционного усилителя 12, то на выходе последнего появляется сигнал, который подается на вход регулятора тока 5 (или вход изменения ограничения напряжения регулятора скорости 4) и осуществляет изменение режима движения механизма поворота (например, при разгоне - уменьшение ускорения механизма), благодаря которому прекращается увеличение нагрузки.
Блок дифференцирования 11 позволяет увеличить эффективность ограничения нагрузки введением на вход операционного усилителя 12 производной от величины этой нагрузки, обеспечивающим упреждающее ограничение. При этом сигнал на выходе операционного усилителя 12 появится тем раньше, чем больше скорость нарастания нагрузки, что позволяет практически исключить превышение нагрузкой допустимой величины.
В то же время при отсутствии опасности превышения нагрузкой допустимой величины сигнал на выходе операционного усилителя 12 отсутствует, т. е. при этом устройство не вмешивается в работу механизма поворота, что способствует повышению производительности экскаватора.
Этой же цели способствует появляющаяся благодаря осуществляемому предлагаемым устройством непосредственному контролю и эффективному ограничению горизонтальных нагрузок на стрелу возможность увеличения ускорения механизма поворота эскаватора. При отсутствии такого ограпичеиия горизонтальная нагрузка на стрелу может практически в два раза превышать величину, определяемую максимальным ускорением механизма поворота (эта двойная величина является расчетной для стрелы), что при заданных допусти.мых значениях нагруз-ки накладывает существенные ограничения на величину этого ускорения. Поскольку режимы разгона, реверса и торможения механизма поворота составляют не менее половины рабочего
цикла экскаватора, это существенно ограничивает производительность экскаватора. Устройство исключает возможность существенного превышения нагрузкой величины, определяемой максимальпым ускоревием механизма поворота, а вместе с тем позволяет при этом же значении допустимой нагрузки увеличить ускорение, что повышает производительность экскаватора, поскольку режимы разгона, реверса и
торможения механизма поворота составляют не менее половины рабочего цикла этой машины.
Таким образом, устройство позволяет благодаря непосредственному контролю и
ограничению горизонтальных нагрузок на стрелу повысить производительность экскаватора, за счет ограничения горизонтальных нагрузок на стрелу.
30
Формула изобретения
Устройство для управления поворотом одноковшого экскаватора, содержащее питающий двигатель механизма поворота
преобразователь, регулятор тока с датчиком тока, регулятор скорости с датчиком скорости, блок определения момента нагрузки механизма поворота, блок дифференцирования, суммирующий элемент операционный усилитель, отличающийся тем, что, с целью повышения надежности и производительности экскаватора за счет ограничения горизонтальных нагрузок на стрелу, оно
снабжено источником постоянного напряжения, датчиком длины тягового каната, блоком перемножения-деления и диодным мостом с регулируемым источником опорного напряжения, включенным в цепь
обратной связи операционного усилителя, выходом соединенного с входом регулятора тока, а к двум входам которого подключен непосредственно и через блок дифференцирования выход блока перемножения-деления, к двум входам перемножения которого подключены блок определения момента нагрузки механизма поЕорота и датчик длины тягового каната, а его вход деления соединен через суммпрующий элемент с датчиком длины тягового каната и источником постоянного напряжения.
Источнпкп информации, принятые во внимание при экспертизе: 1. Автоматизация производственных процессов на открытых горных раэработ:. ,„, ках. - Сборник. Киев, «Техника, 1971, с. 56-60.5 2. Авторское свидетельство № 281600, кл. Е 02 F 3/48, 1969. 3. Заявка № 2468484/03, кл. Е 02 F 9/20, 1977, по которой принято решение о выдаче авторского свидетельства.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| Система управления механизмом поворота экскаватора-драйглайна | 1977 |
|
SU653347A1 |
| Устройство для определения загрузки ковша драглайна | 1978 |
|
SU747942A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Устройство для ограничения динамических усилий в канатах экскаватора | 1977 |
|
SU609848A1 |
