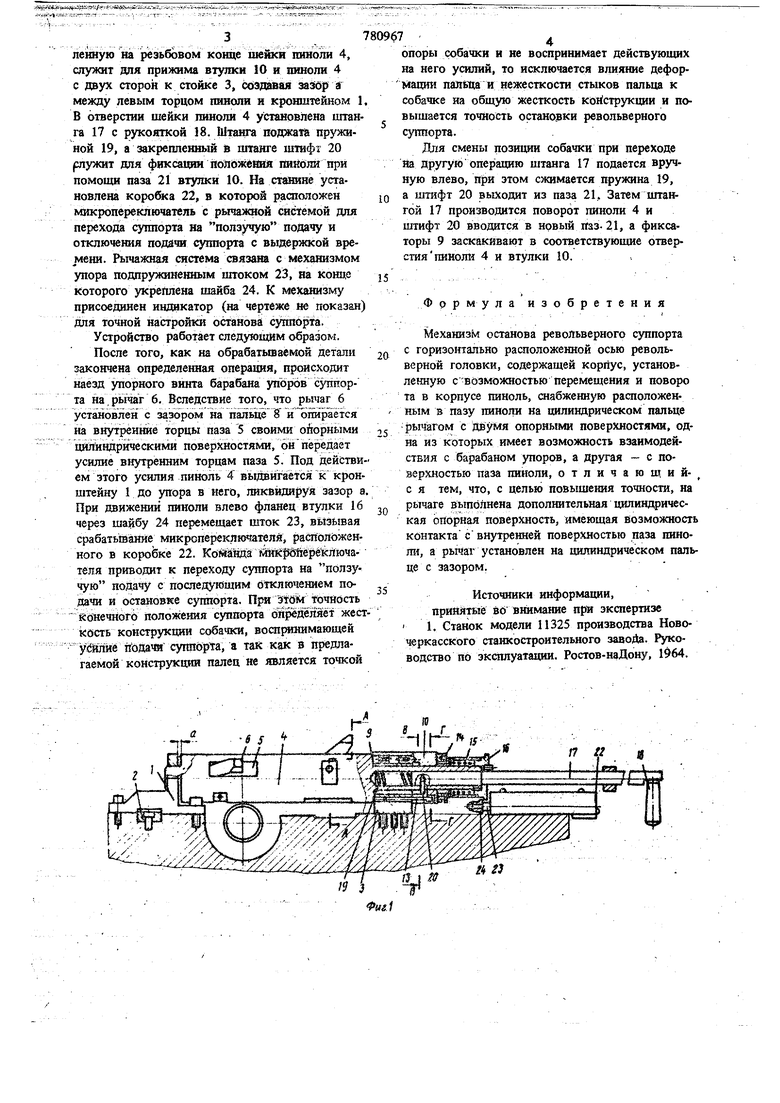
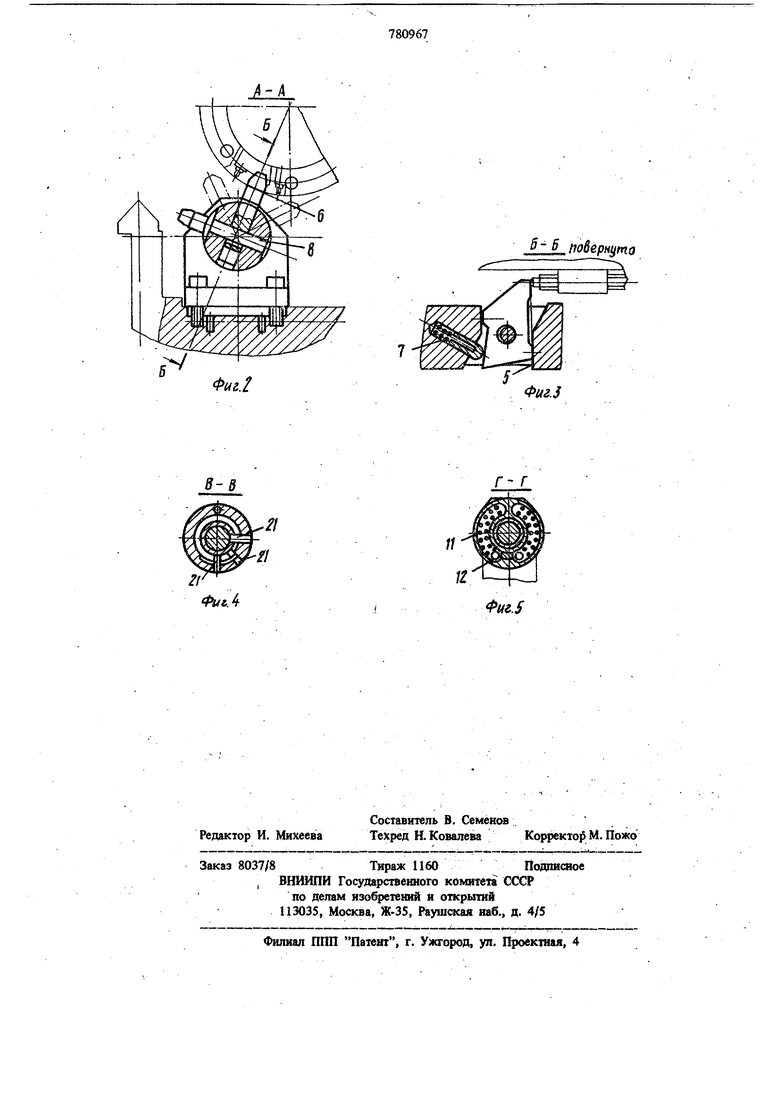
ленную на резьбовом конце шейки пиноли 4, служит для прижима втулки 10 и пиноли 4 с №ух. сторон к стойке 3, создавая а между левым торцом пинопи и кронштейном 1 В отверстии шейки пиноли 4 установлена штанга 17 с рукояткой 18. Штшга поджата пружиной 19, а закрепленный в штанге штифт 20 ртужит для фиксации ло пожёШЁя Линоли при помоши паза 21 втупки 10. На стшо1не установлена коробка 22, в которой рашоложен лопсропереключатель с рычазююй системой для перехода суппорта на ползучую поДачу и отключения подачи суппорта с выдержкой времени. Рычажная система связана с механизмом упора подпружиненным штоком 23, на конце Которого укреплена шайба 24. К механизму присоединен индикатор (на чертеже не показан) для точной настройки останови суппорта. Устройство работает следующим образом. После того, как на обрабатьшаемой детали закончена определенная операция, происходит наезд упорного винта барабана упоров суппорта на рычаг 6. Вследствие того, что рычаг 6 установлен с зазором на пальце8 и на внутренние торцы паза 5 своими ойорными цилиндрическими поверхностями, он передает усилие внутренним торцам паза 5. Под действи ем этого усилия пнноль 4 выдвигается к кронштейну 1 до упора в него, ликвидируя зазор а При движении пиноли влево фланец втулки 16 через шайбу 24 перемещает шток 23, вызывая срабатывание микропереключателя, расположенного в коробке 22. КбШвдз шкрбШрёТКЛючателя приводит к переходу суппорта на ползучую подачу с последующим отключением подачи и остановке сугаторта. ПртЭтбМ точность КбнечНогй положения суппорта определяет жест kocTb конструкции собачки, воспринимающей убйлйе подачи суппорта, а так как в предлагаемой конструкции палец не является точкой 4. опоры собачки и не воспринимает действующих на него усилий, то исключается влияние деформации пальца и нежесткости стыков пальца к собачке на общую жесткость конструкции и повышается точность остановки револьверного суппорта. Для смены цозиции собачки при переходе на другую операцию штанга 17 подается вручную влево, Ири зтом сжимается пружина 19, а штифт 20 выходит из паза 21, Затем штангой 17 производится поворот пиноли 4 и штифт 20 вводится в нрвый паз-21, а фиксаторы 9 заскакивают в соответствующие отверстияпиноли 4 и втулки 10. Формула изобретения Механизм останова револьверного суппорта с горизотально расположенной осью револьверной головки, содержащей корпус, установленную сВОЗМОЖНОСТЬЮ перемещения и поворо та в корпусе пиноль, снабженную расположенным в пазу пиноли на цилиндрическом пальце -рычагом с Двумя опорными поверхностями, одна из которых имеет возможность взаимодействия с барабаном упоров, а другая - с поверхностью паза пнноли, о т л и ч а ю ai, и йс я тем, что, с целью повышения точности, на рычаге выполнена дополнительная цилиндрическая опорная поверхность, имеющая возможность контакта с внутренней поверхностью паза пиноли, а рычаг установлен на цилиндрическом пальце с зазором. Источники информации, приНятьи вй взимание при экспертизе 1. Станок модели 11325 производства Новочеркасского станкостроительного завойа. Руководство по зксплуатации. Ростов-наДону, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм останова револьверного суппорта токарно-револьверного станка | 1984 |
|
SU1184610A1 |
| Револьверная головка | 1971 |
|
SU650724A1 |
| Револьверный суппорт с горизонтальной осью револьверной головки | 1979 |
|
SU887069A1 |
| Револьверная головка | 1980 |
|
SU979026A1 |
| Револьверный суппорт | 1975 |
|
SU653033A1 |
| Револьверная головка | 1981 |
|
SU984702A1 |
| РЕВОЛЬВЕРНЫЙ СУППОРТ С ВЕРТИКАЛЬНОЙ ОСЬЮ РЕВОЛЬВЕРНОЙ ГОЛОВКИ | 1973 |
|
SU376177A1 |
| Револьверная головка | 1980 |
|
SU908544A1 |
| Силовая головка | 1990 |
|
SU1756030A1 |
| Револьверная головка | 1988 |
|
SU1593785A1 |
J-lA.
Фиг.
i повернуто
Фкг.
В-В
//
Г- Г
. 4
//г.У
