(54) ШАГОНЫЙ КОНВЕЙЕР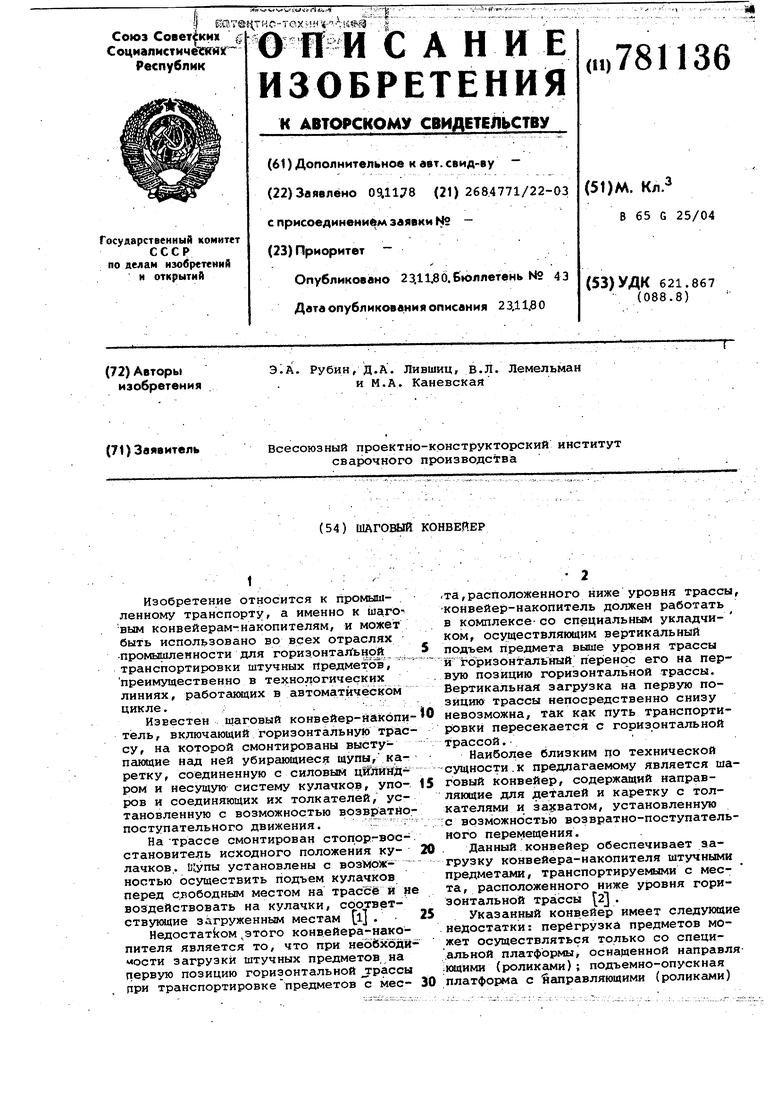
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1980 |
|
SU908690A1 |
| Шаговый конвейер | 1979 |
|
SU839903A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU747778A1 |
| Шаговый конвейер-накопитель | 1979 |
|
SU859259A1 |
| Шаговый конвейер-накопитель | 1983 |
|
SU1113329A1 |
| Шаговый конвейер | 1975 |
|
SU554190A1 |
| Шаговый конвейер-накопитель | 1976 |
|
SU676507A1 |
| Шаговый конвейер-накопитель | 1984 |
|
SU1191386A2 |
| Шаговый конвейер-накопитель | 1974 |
|
SU526562A1 |
| Транспортная система автоматической линии | 1980 |
|
SU897475A1 |
Изобретение относится к промыш- . ленному транспорту, а именно к шаговым конвейерам-накопителям, и может быть использовано во всех отраслях промышленности для горизонтальной ,, транспортировки штучных Предметов, преимущественно в тез(:нологических линиях, работакяцих в автоматическом цикле. , . jИзвестен шаговый конвейер-на с6питёль, включающий горизонтальную трассу, на которой смонтированы выступающие над ней убирающиеся щупы, каретку, соединенную с силовым цйЙйЯЙ;ром и несущую систему кулачков, упо- 15 ров и соединяющих их толкателей/ установленную с возможностью возвратйопоступательного движения. : т .
Натрассе смонтирован стопоргвос-. становитель исходного положения ку- 20 лачков.. и1;упы установлены с возМо ностью осуществить подъем кулачков перед свободным местом на трассе и ре воздействовать на кулачки, сортвет- ствующие загруженным местам l .
Heдocтaтkoм этого конвейера-накопителя является то, что при не(эбх6дйчости загрузки штучных предметов на первую позицию горизонтальной jpaccu рри транспортировкепредметов с мес- 30
-та,расположенного ниже уровня трассы, конвейер-накопитель должен работать в комплексе- со специальным укладчиком, осуществляющим вертикальный подъем предмета выше уровня трассы и горизонтальный его на первую позицию горизонтальной трассы. Вертикальная загрузка на первую позицию трассы непосредственно снизу невозможна, так как путь транспортировки пересекается с горизонтальной трассой.
Наиболее близким по технической сущности.к предлагаемому является шаговый конвейер, содержащий направляющие для деталей и каретку с толкателями и захватом, установленную С возможностью возвратно-поступательного перемещения.
Данный конвейер обеспечивает загрузку конвейера-накопителя штучными предметами, транспортируемыми с места, расположенного ниже уровня горизонтальной трассы 2 .
Указанный конвейер имеет следующие недостатки: перегрузка предметов может осуществляться только со специ.альной платформы оснащенной направля |ЮЩими (роликами); подъемно-опускная платформа с направляющими (роликами)
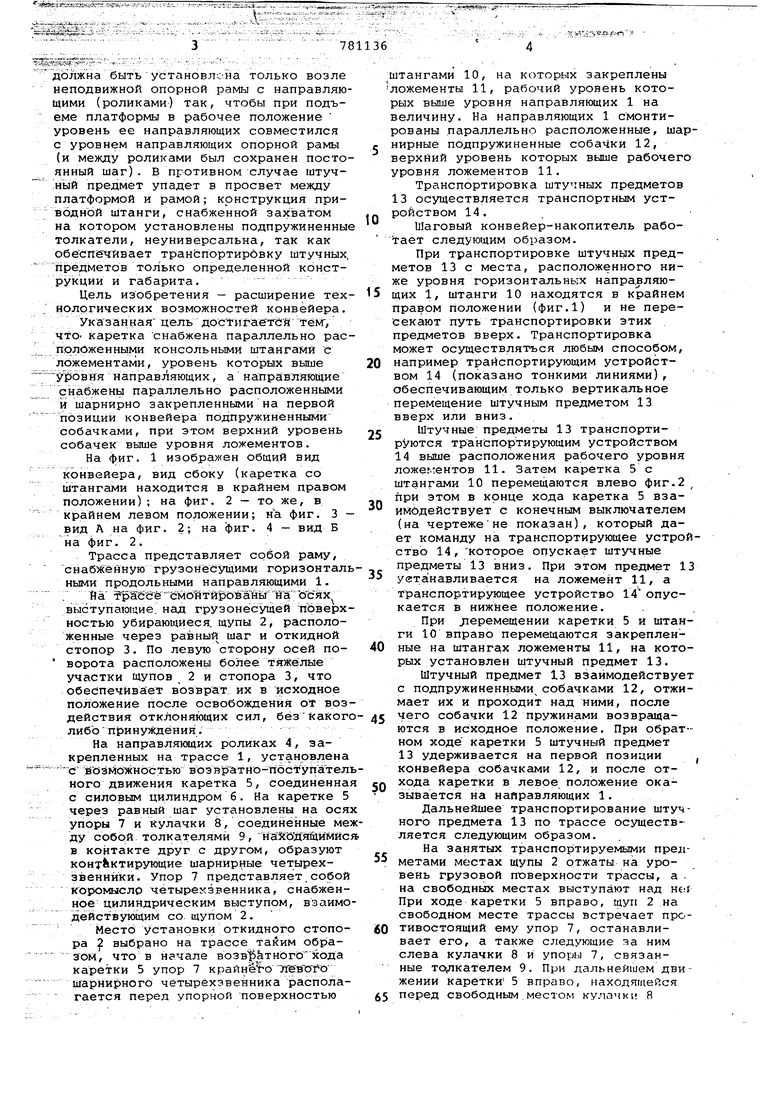
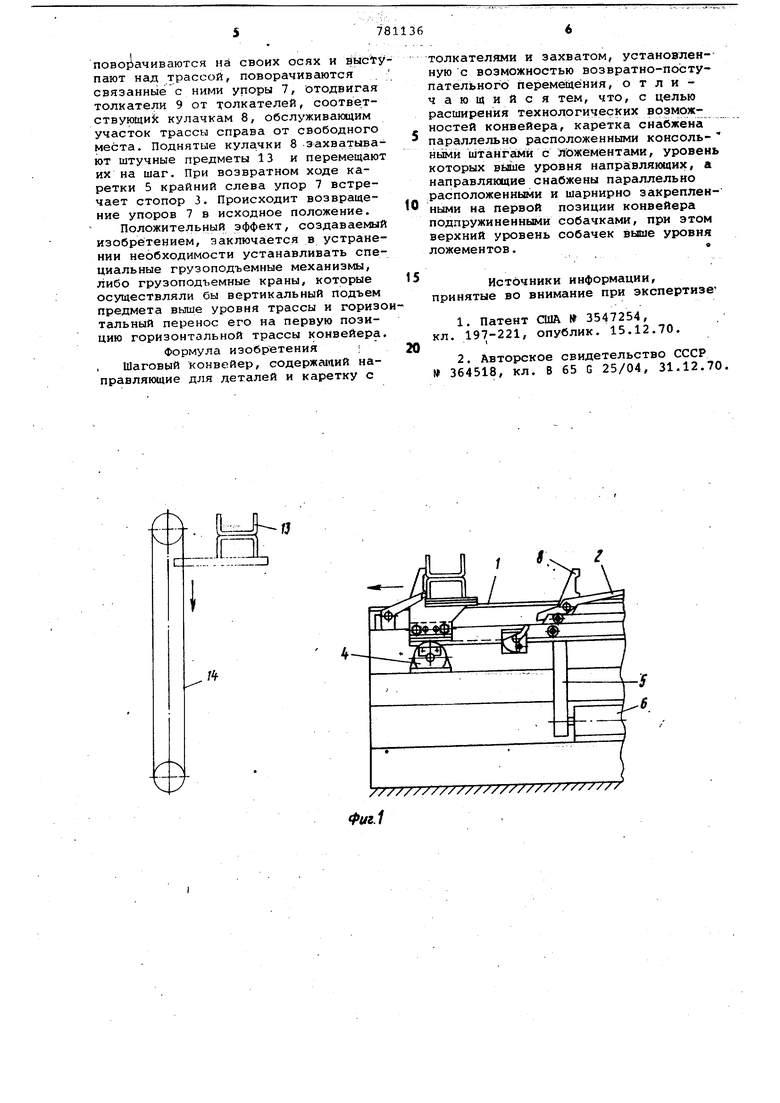
781136 должна бытьустановл;:на только возле неподвижной опорной рамы с направляю щими (роликами) так, чтобы при подъеме платформы в рабочее положение уровень ее направляющих совместился с уровнем направляющих опорной рамы (и между роликами был сохранен посто янный шаг). В противном случае штуч ный предмет упадет в просвет между платформой и рамой; конструкция при; водной штанги, снабженной захватом на котором установлены подпружиненны толкатели, неуниверсальна, так как обеспечивает транЬпортирбвку штучных предметов только определенной конструкции и габарита. Цель изобретения - расширение тех J нолргических возможностей конвейера. Указанная цель досТигаегея текг/ ЧТО каретка снабжена параллельно рас положен нцми консольными штангами с ложементами, уровень которых выше ; Уровня направляющих, а направляющие снабжены параллельно расположенными и шарнирно закрепленными на первой позиции конвейера пбдпружинеиными собачками, при этом верхний уровень собачек выше уровня ложементов. На фиг. 1 изображен общий вид конвейера, вид сбоку (каретка со штангами находится в крайнем правом положении); на фиг. 2 - то же, в крайнем левом положении; на фиг. 3 вид А на фиг. 2; на фиг. 4 - вид Б на фиг. 2. Трасса представляет собой раму, снабжённую грузонёсущими горизонтал ными продольными направляющими 1. ; йа рЖ: %--ййс51чтЙ эЬв1йы;на:;есйх выступающие, над грузонесущей поверх ностью убирающиеся, щупы 2, расположенные через равный шаг и откидной стопор 3. По левую сторону осей поворота расположены брлёё тяжёлые участки щупов 2 и стопора 3, что обеспечивает возврат, их в исходное положение после освобождения от воз действия отклоня1Ьщих сил, безкаког либо прину5кдёния. На направляквдих роликах 4, закрепленных на трассе 1, установлена ВОЗМОЖНОСТЬЮ возйр атно-пОступател ного движения каретка 5, соединенна с силовым цилиндром 6. На каретке 5 через равный шаг установлены на ося упоры 7 и кулачки 8, соединённые ме ду собой толкателями 9, наХОдящйМйс в контакте друг с другом, образуют конт 1ктирующие шарнирные четырехзвеннйки. Упор 7 представляет.собой коромысло четырехзвенника, снабженное- цилиндрическим выступом, взаимо действующим со щупом 2. Место установки откидного стопо ра выбрано на трассе тайим образОй, что в начале возв тнОгО хода каретки 5 упор 7 крайнего TrTeBOfо шарнирного чётырехэвенника распола гается перед упорной поверхностью тангами 10, на которых закреплены ожементы 11, рабочий уровень котоых выше уровня направляющих 1 на еличину. На направляющих 1 смонтиованы параллельно расположенные, шарнирные подпружиненные собачки 12, ерхний уровень которых выше рабочего ровня ложементов 11. Транспортировка штучных предметов 13осуществляется транспортным устройством 14. . Шаговый конвейер-накопитель работает следующим образом. При транспортировке штучных предметов 13 с места, расположенного ниже уровня горизонтальных направляющих 1, штанги 10 находятся в крайнем правом Положении (фиг.1) и не пересекают путь транспортировки этих предметов вверх. Транспортировка может осуществляться любым способом, например трайспортирующим устройством 14 (показано тонкими линиями), обеспечивающим только вертикаль ное перемещение штучным предметом 13 вверх или вниз. Штучные предметы 13 транспортируются транспортирующим устройством 14выше расположения рабоч.его уровня ложег.-ентов 11. Затем каретка 5 с штангами 10 перемещаются влево фиг.2 при этом в конце хода каретка 5 взаимодействует с конечным выключателем (на чертежене показан), который дает команду на транспортирующее устройство 14, которое опускает щтучные предметы 13 вниз. При этом предмет 13 угт;а навливается на ложемент 11, а транспортирующее устройство 14 опускается в нижнее положение. При /1еремещении каретки 5 и штанги 10 вправо перемещаются закрепленные на штангах ложементы 11, на которых установлен штучный предмет 13. Штучный предмет 13 взаимодействует с подпружиненными собачками 12, отжимает их и проходит над ними, после чего собачки 12 пружинами возвращаются в исходное положение. При обратном ходе каретки 5 штучный предмет 13 удерживается на первой позиции конвейера собачками 12, и после отхода каретки в левое положение оказь:вается на направляющих 1. Дальнейшее транспортирование штучного предмета 13 по трассе осуществляется следующим образом. На занятых транспортируемыми предметами местах щупы 2 отжаты на уровень грузовой поверхности трассы, а на свободных местах выступают над Ht;f При ходе каретки 5 вправо, щуп 2 на свободном месте трассы встречает противостоящий ему упор 7, останавливает его, а также следующие за ним слева кулачки 8 и упоры 7, связанные то 1кателем 9. При дальнейшем движении каретки 5 вправо, находящейся перед свободным местом ку-пачки 8 5 , поворачиваются на своих осях и йыст пают над трассой, поворачиваются связанные с ними упоры 7, отодвигая толкатели 9 от толкателей, соответствующий кулачкам 8, обслуживающим участок трассы справа от свободного места. Поднятые кула.чки 8 захватыва ют штучные предметы 13 и перемещаю их на шаг. При возвратном ходе каретки 5 крайний слева упор 7 встречает стопор 3. Происходит возвращение упоров 7 в исходное положение. Положительный эффект, создаваемый изобретением, заключается в устранении необходимости устанавливать специальные грузоподъемные механизмы, либо грузоподъемные краны, которые осуществляли бы вертикальный подъем предмета выше уровня трассы и горизо тальный перенос его на первую позицию горизонтальной трассы конвейера. Формула изобретения Шаговый конвейер, содержащий направляющие для деталей и каретку с толкателями и захватом, установленную с возможностью возвратно-поступательного перемещения, о т л и чающийся тем, что, с целью расширения технологических возможностей конвейера, каретка снабжена параллельно расположенными консоль- ньлмй штангами с ложементами, уровень которых выше уровня направляющих, а направляющие снабжены параллельно расположенными и шарнирно закрепленными на первой позиции конвейера подпружиненными собачками, при этом верхний уровень собачек выше уровня ложементов. Источники информации, принятые во внимание при экспертизе1.Патент США 3547254, кл. 197-221, опублик. 15.12.70. 2.Авторское свидетельство СССР 364518, кл. В 65 G 25/04, 31.12.70.
Ы-о
Г.
В ид К
Вид Б
Фи&4
