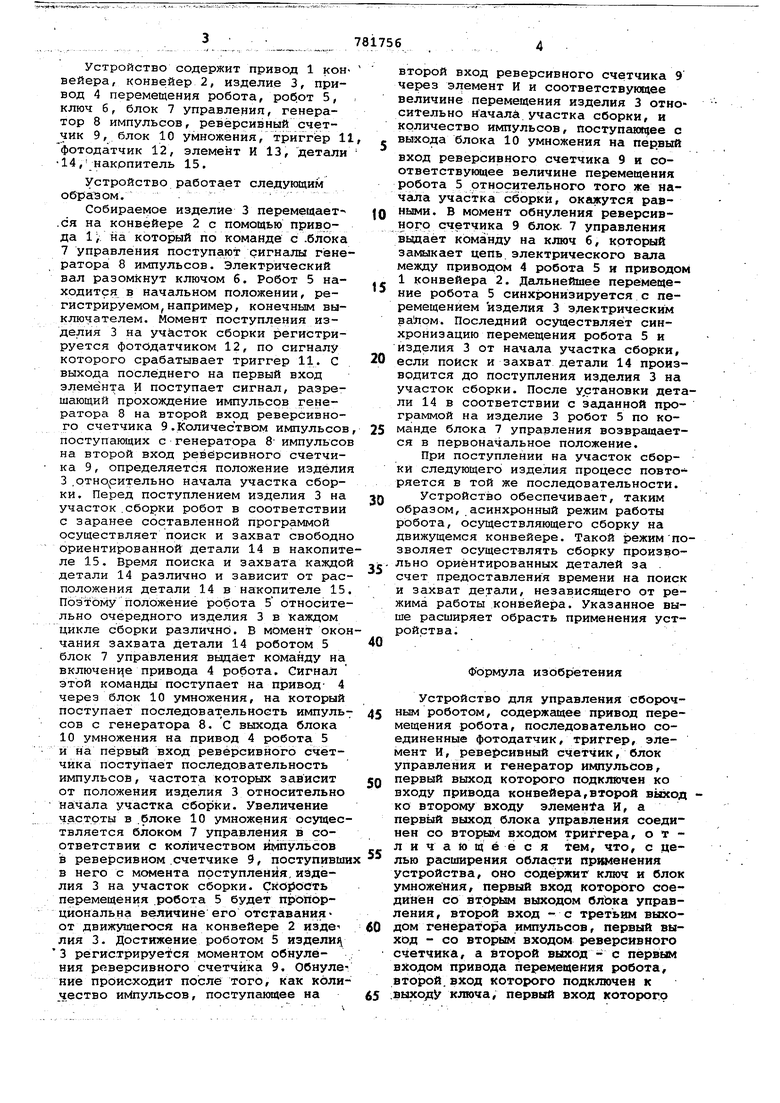
Устройство содержит привод 1 конвейера, конвейер 2, изделие 3, привод 4 перемещения робота, робот 5, ключ 6, блок 7 управления, генератор 8 импульсов, реверсивный счетчик 9, блок 10 умножения, триггер 11 фотодатчик 12, элемент И 13, детали 14, накопитель 15.
Устройство работает следующим o6pia3oM.
Собираемое изделие 3 перемещает-
.ся на конвейере 2 с помощью привода 1j на который по команде с .блока 7 управления поступают сигналы генератора 8 импульсов. Электрический вал разомкнут ключом 6. Робот 5 находится в начальном положении, регистрируемом, например, конечным выключателем. Момент поступления изделия 3 на участок сборки регистрируется фотодатчиком 12, по сигналу которого срабатывает триггер 11. С выхода последнего на первый вход элемента И поступает сигнал, разрешающий прохождение импульсов генератора 8 на второй вход реверсивного счетчика 9.Количеством импульсов поступающих с генератора 8- импульсов на второй вход рейёрсивного счетчика 9, определяется положение изделия 3 .отно сительно начала участка сборки. Перед поступлением изделия 3 на участок .сборки робот в соответствии с заранее составленной программой осуществляет поиск и захват свободно ориентированной детали 14 в накопителе 15. Время поиска и захвата каждой детали 14 различно и зависит от расположения детали 14 в накопителе 15. Поэтому положение робота 5 относительно очередного изделия 3 в каждом цикле сборки различно. В момент окончания захвата детали 14 роботом 5 блок 7 управления вьвдЭет команду на включен1 е привода 4 робота. Сигнал этой команды поступает на привод- 4 через блок 10 умножения, на который поступает последовательность импуль7 сов с генератора 8. С выхода блока 10 умножения на привод 4 робота 5 и на первый вход реверсивного счётчика поступает последовательность импульсов, частота которых зависит от положения изделия 3 относительно начала участка сборки. Увеличение частоты в .блоке 10 умножения осуществляется блоком 7 управления в соответствии с количеством Импульсов JB реверсивном .счетчике 9, поступивши в него с момента поступления,изделия 3 на участок сборки. CkoiiocTb перемещения робота 5 будет пропорциональна величине его отставания от движущегося на конвейере 2 изде ЛИЯ 3. Достижение роботом 5 изделия
3 регис.трируетгся моментом обнуления реверсивного счетчика 9. Обнуление происходит после того, как количество иМпульсов, поступающее на
второй вход реверсивного счетчика 9 через элемент И и соответствугацее величине перемещения изделия 3 относительно начали участка сборки, и количество импульсов, йоступакщее с выхода блока 10 умножения на первый
вход реверсивного счетчика 9 и соответствующее величине перемещения робота 5 относительного того же начала участка сборки, окажутся равными. В момент обнуления реверсивного счетчика 9 блок 7 управления выдаёт команду на ключ 6, который замыкает цепь электрического вала между приводом 4 робота 5 и приводом 1 конвейера 2. Дальнейшее перемещение робота 5 синх хэнизируется с перемещением изделия 3 э.лектрическим валом. Последний осуществляет синхронизацию перемещения робота 5 и изделия 3 от начала участка сборки, если поиск и захват детали 14 производится до поступления изделия 3 на участок сборки. После установки детали 14 в соответствии с згщанной программой на изделие 3 робот 5 по команде блока 7 управления возвращается в первоначальное положение.
При поступлении на участок сборки следующего изделия процесс повторяется в той же последовательности.
Устройство обеспечивает, таким образом,.асинхронный режим работы робота, осуществляющего сборку на движущемся конвейере. Такой режимпозволяет осуществлять сборку произвольно ориентированных деталей за . счет предоставления времени на поиск и захват детали, независящего от режима работы конвейера. Указанное выше расширяет обрасть применения устройства.
Формула изобретения
Устройство для управления сборочным роботом, содержащее привод перемещения робота, последовательно соединенные фотодатчик, триггер, элемент И, реве| сивный счетчик, блок управления и генератор импульсов, первый выход которого подключен ко входу привода конвейера,второй выход ко второму входу элемен а И, а первый выход блока управления соединен со вторым входом триггера, отличающееся teM, что, с целью расширения области прЮ4еиения устройства, оно содержит ключ и блок умножеиия, первый вход которого соединен со вторам выходом блЪка управления, второй вход - с третьим выходом генератора импульсов, первый выход - со вторым входом реверсивного счетчика, а второй выход - с первым входом привода перемещения робота, второй, вход которого подключен к выхрдУ ключа, первый вход которого
соединен с выходом привода конвейера, а второй вход - с третьим выходом блока управления.
Источники информации, лринятые во внимание при экспертизе1,Авторское свидетельство СССР W 477394, кл.С 05 В 15/00,10.12.73.
2. Авторское свилетельство СССР № 491929, кл.С 05 В 15/02, 15.01.75 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| Устройство для управления адаптивным роботом | 1981 |
|
SU1004972A1 |
| Устройство для управления адаптивным роботом | 1982 |
|
SU1115015A1 |
| Устройство для управления сборочным роботом | 1984 |
|
SU1236418A1 |
| Устройство для поиска информации на кинопленке | 1983 |
|
SU1166137A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1130829A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Устройство для управления адаптивным роботом | 1982 |
|
SU1121645A1 |
| Устройство для учета и контроля предметов перемещаемых конвейером | 1977 |
|
SU746633A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU457970A1 |
