(54) УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ПРЯМОУГОЛЬНЫХ КООРДИНАТ В ПОЛЯРНЫЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровой преобразователь | 1982 |
|
SU1786661A1 |
| Аналого-цифровой преобразователь | 1986 |
|
SU1322475A1 |
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| Устройство для преобразования координат | 1985 |
|
SU1254475A1 |
| Устройство для вычисления элементарных функций | 1986 |
|
SU1310812A1 |
| Нелинейно-нелинейный корректор коррелированного сигнала | 1984 |
|
SU1225017A1 |
| Устройство для преобразования координат | 1983 |
|
SU1141405A1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |
| Цифровой преобразователь координат | 1980 |
|
SU943715A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU845167A1 |
i
Изобретение относится к вычислительной технике и может быть использовано в системах, работа ко торых требует преобразования декартовых координат в полярные,
Известны аналогичные устройства, в которых определение модуля и аргумента вектора осуцествляется вылолнением ряда последовательных дискретных поворотов системы координат до обнуления одной из двух ортогональных составляющих, при этом на каждом последующем шаге угол поворота уменьшается вдвое, а направление поворота на следующем шаге определяется знаком одной из получающихся ортогональных составляющих , или сопоставлением величин модуля, вычисляемых для выбранных направлений 1 и 21 .
Известно устройство, содержащее регистр, синусный и косинусный преобразователи, связанные с входами устройства, подключенный к преобразователям сумматор, а также селектор знака суммы, компаратор и логический блок, определяющий направление очередной итерации 1,
Недостаток устройства - существенная сложность. X
Наиболее близким по технической сущности к предлагаемому является, устройство для преобразования прягмоугольных координат в полярные,
5 содержащее соединенные последовательно блоки преобразования, каждый из которых содержит сумматор и элемент выбора максимума, входы .которых связаны с выходами предыдущего блока преобразования, а также компаратор и логический злзмент эквивалентность, блоки взятия модуля, стоящие на входах, и дешифратор, входы которого соединены с выходами
15 логических элементов 2. Направление очередного поворота и одновременно содержимое очередного разряда кода аргумента определяется сравнением величин модулей, определенных
20 в предьвдущем и в следующем-блоках преобразования.
Недостаток устройства - низкая разрешающая,, способность преобразования, обусловленн.ая необходимостью выявления малых разностей больших величин в блоках выбора, максимума из-за искажения .вычисляемых величин модуля вектора при прохождении loc
30 через нелинейные блоки выбора максимума, и все большим сближением 5бпЬставЛяейых величин при уз&пцчении числа итераций .
Цель изобретения - повышение азрешающей способности преобразования.
Поставленная цель-лостигается ем, что устройство для преобразования прямоугольных координат в полярные, содержащее первую группу из N локов взвешенного суммирования, перый из которых связан первым суммирукяциМ входом с первым входом устройства, а первый суммирующий вход ч казкдого последующего блока соединен с выходом предыдущего, дополнительно содержит вторую группу из N блоков взвешенного суммирования, N дискриМинаторов знака и две группы из N сдвоенных двухпозиционных переключателей каждая, первый блок взвешенного суммирования второй группы связан первым суммирующим входом со вторым входом устройства, а первый суммирующий вход каждого последующего блока соединен с выходом предыдущего, два крайних неподвижных контакта в каждом из сдвоенных двухпозиционных переключателей соединены с шиной нулевого потенциала, средний неподвижный контакт и два подвижных контакта irro сдвоенного двухпозиционного переключателя первой группы соединены соответственно с первым суммирующим входом i-ro блока взвеенного суммирования второй группы блоков, с вычитающим и вторым суммирующим входами блока взвешенного суммирования первой группы блоков, средний контакт и два подвижных контакта 1-го сдвоенного двухпозиционного переключателя второй группы соединены соответственно с первьЬл суммирующим входом i-ro блока взве- , шенного суммирования первой группы блоков,С вычитающим и вторым суммирующим входами i-ro блока взве-.шенного суммирования второй группы блоков, управляющий вход i-того сдвоенного двухпозиционного переключателя каждой группы связан через i-тый дискриминатор знака с первым суммирующим входом i-ro блока взвешенного суммирования первой группы, выходы дискриминаторов знака являются выходными шинами кода аргумента, а выход N-ro блока взвешенного суммирования STOРОй группы блоков является выходом модуля вектора.
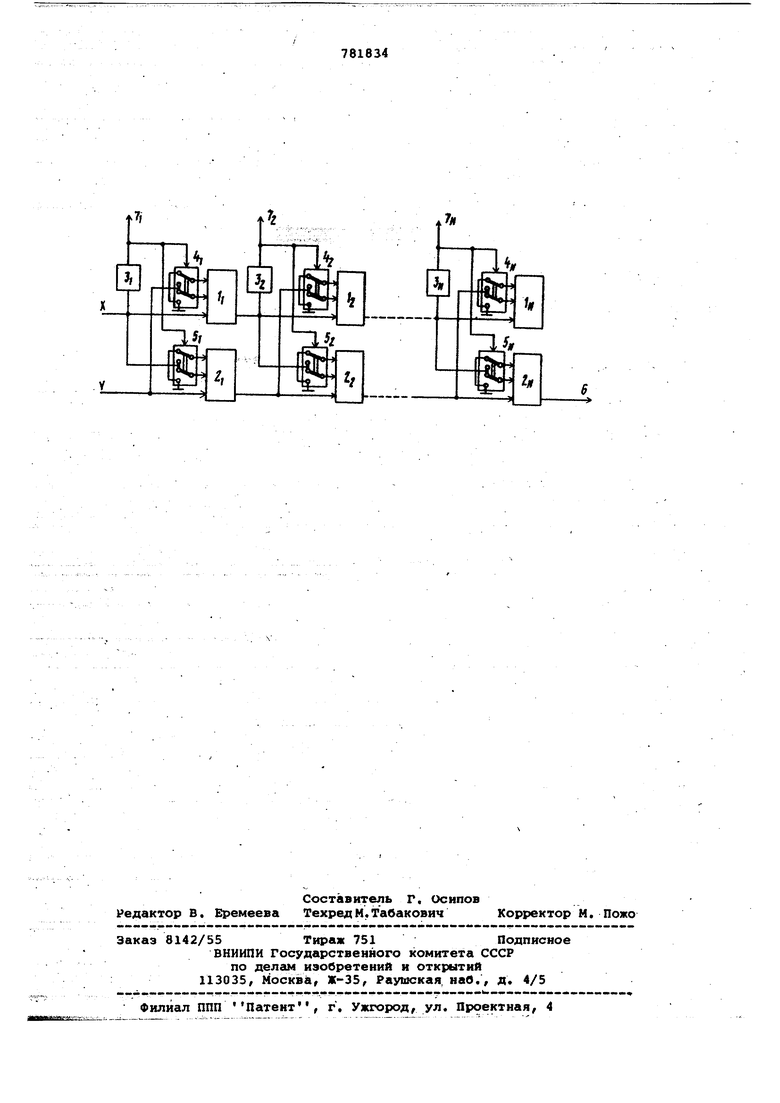
На чертеже представлена блок-схема устройства.
Устройство с6деб жит две группы по N блоков 1, 2 взвешенного суммирования, N дискриминаторов знака 3, две группы по N сдвоенных двухпозиционных переключателей 4, 5, выход б модуля вектора, выходные шины , 14 - 7и ода аргумента.
Устройство работает следующим образом.
На первом шаге осуществляется поворот вектора (х,у) на IBo путем реализации соотношений
(1)
У., - у.
х,
На i-TOM шаге угол поворота равен
i 1 2.,.N (2) Направление поворота определяется знаком одной из проекций предыдущего положения вектора и зависит от заданного направления отсчета yrha в системе координат (левой или правой) Нап эймер, если вектор поворачивается до совмещения с осью у и угол отсчитывается от этой оси по часовой стреке (географическая система коорди нат), то
signcp4 sign (3)
Если sign tp + If то поворот вектора осуществляется против часовой стрелки, а при sign(p - 1 - по часовой стрелке.
Поворот осуц;ествляется путем выполнения операций
х Х4и cos(f- У4 sincp, ,4)
У У.1 cos((+ х;, sin (ре; ; В результате N поворотов вектор займет положение, отличающееся от оси у на угол, не превышакяций значения utj 36cf/2n. Угловое положение вектора в исходной системе координат с погрешностью, не превосходящей dtp определяется выражением
If .S:.( signqj; (5) Если за величину модуля принять значние УП , fo пбгрешность определения модуля не превысит значения l-cqs5l
В первом каскаде устройства.определяется знак первого входного напряжения и в зависимости от этого знака производится взвешенное суммировани1е входных напряжений, эквивалентное повороту вектора, заданного первым и вторым входными иапряжения ми постоянного тока таким образом, чтобы уменьшить по абсолютной величине первое выходное напряжение. Аналогичные операции осуществляются в последующих каскадах, число которы равно разрядности кода угла N и определяется допустимой погрешностью 4 if определения угла.
Блоки 1, 2 взвешенного суммирования могут быть выполнены на дифференциальных операционных усилителях, коэффициенты передачи которых по каждому входу определяются номером i блока, в соответствии с выражениями (4) .
, Дискриминатор знака 3 может быть реализован стандартными методами с использованием компараторов. Для повсйиения помехоустойчивости выполняется компаратор в виде триггера Цу1итта с шириной петли гистерезиса,
айвисящей от величины модуля минимально BO3MokHoro комплексного сигнала и требуемой разрМдности кода аргумента.
При поворот вектора на 180 равносилен просто изменению знаков проекций вектора (1), поэтому можно отказаться от реализации первого разряда, считая, что вес старшего разряда равен постоянно + 180° а изменение знака проекций учесть схемно, при реализации второго разряда, путем инвертирования направления поворота на 9о. Схема ячейки для реализации второго разряда (образованной блоками 1.2 - bj} несколько упрощается по сравнению с типовой ввиду известных равенств: cos 90 О sin 90° 1, Схема ячейки для реализации последнего разряда тоже упрощается по сравнению с типовой, так как значение Xjj определять не нужно.
Рассмотренное преобразование определяет так называемый знакоразрядный код :в долях окружности
ц- -1.)Г2- где
0(.; принимают значения О при sign(f; +1 и Ч при sign(f -1. Для перехода от такого кодак обычному двоичному коду достаточно инвертировать все разряды, сдвинуть их на один разряд влево и в освободившийся млс1дший разряд записать единицу. Образующийся перенос, равный 1, при этом игнорируется, так как он представляет собой угол 360 . При практической реализации дополнительных аппаратурных затрат для преобразования кода не требуется, В случае необходимости перевод долей окружности в градусы производится стандартными способами.
Технико-экономическая эффективность от использования изобретения определяется возможностью построения достаточно точного спецвычислителя, на простых элементах.
Формула изобретения
Устройство для преобразования прямоугольных координат в полярные, содержащее первую группу из N блоков взвешенного суммирования, первый ид которых связан первым суммирую:щим Bxoiqdivf с nepatavi входом устройства, а первый суммирующий вход каждого последзющего блока соединен с выходом предыдуще го, о т л и ч а ющ е е с я тем, что, с целью повышения разрешающей способности, устройство содержит вторую группу из N блоков взвешенного суммирования, N дискриминаторов знака и две группы из N сдвоенных двухпозиционных переключателей каждая, первый блок
0 взвешенного суммирования второй группы связан первым суммирующим входом со вторым входом устройства, а перBbdi суммирующий вход каждого последующего блока соединен с выходом
5 предыдущего, два крайних неподвижных контакта в. каждом из сдвоенных двухпозиционных переключателей соединены с шиной нулевого потенциала, средний неподвижный контакт и два
0 подвижных контакта i-rp сдвоенногэ двухпозиционного переключателя первой группысоединены соответственно с первым суммирующим входом .1-го блока взвешенного суммирования ,второй группы блоков, с вычитающим и вто5рым сугФшруквдими входами i-ro блокавзвешенного суммирования первой группы блоков, средний контакт и два подвижных контакта i-ro сдвоенного двухпозиционного переключателя второй группы соединены соответственно с первым суммирующим входом i-ro блока взвешенного суммирования первой группы блоков, с вычитающим и вторым суммирующим входами i-ro
5 блока взвешенного суммирования второй группы блоков, управляющий вход i-Toro сдвоенного двухпозиционного переключателя каждой группы соединен через i-тый |Дискриминатор знака с
Q первьм суммирующим входом i-ro
блока взвешенного суммирования первой группы, выхода дискриминаторов знака являются выходньо о шинами кода аргумента, а выход N-го блока. взвешенного суммирования второй группы блоков я,вляется выходом модуля вектора.
Источники информации, принятые во внимание при экспертизе
2,Авторское свидетельство СССР по заявке 2675220/18-24,
кл, G 06 G 7/22, 1978 (прототип),/
