1
Изобретение относится к области автоматического регулирования и может быть использовано для измерений сдвига фаз на фиксированных инфранизких частотах систем автоматичес- 5 кого управления.
Известен анализатор сверхнизких частот , содержащий электромеханический генератор, вращающийся транс-форматор,модуляторы и серводвигател 10 который отрабатывает сигнал рассогласования, пропорциональный углу сдвига фаз до нулевого значения, при этом производится индикация измеренного значения. Однако это устройство не и обладает достаточной точностью.
Наиболее близким к гфедлагаемому техническому решению является устройство для определения jiacTOTHHx характеристик систем автоматического упраз-iQ лерия С2, содержащее задающий генёг; ратор со шкалой в виде синусного реостата с приводом регулиру емой скорости, переключатель и измерительную схему, в котором,с целью упрощения кон- .25 с.трукции и повышения точности измере- , установлены выпрямитель, вход и выход которого через переключатель связаны с измерительной схемой, и дополнительный синусный реостат, об- JQ
мотки подвижного статора которого подсоединены ко входу выпрямителя, а щетки ротора, механически связанного с ротором реостата задающего генератора, подключены к выходу исследуемой системы.
Однако практическое применение такого устройства для измерения угла сдвига фаз показало, что точность измерения его невысока, порядка 5% от номинальной величины. Это является следствием того, что выходной электрический сигнал системы автоматического управления не имеет чисто синусоидальной формы и не защищен от помех, что приводит к потере точности при измерении.
Целью изобретения является повышение точности измерения за счет обеспечения возможности формирования импульсных сравниваеьмх сигналов с прямоугольным передним фронтом, электрически не зависящих от электрических характеристик задающей части генератора и наличия помех.
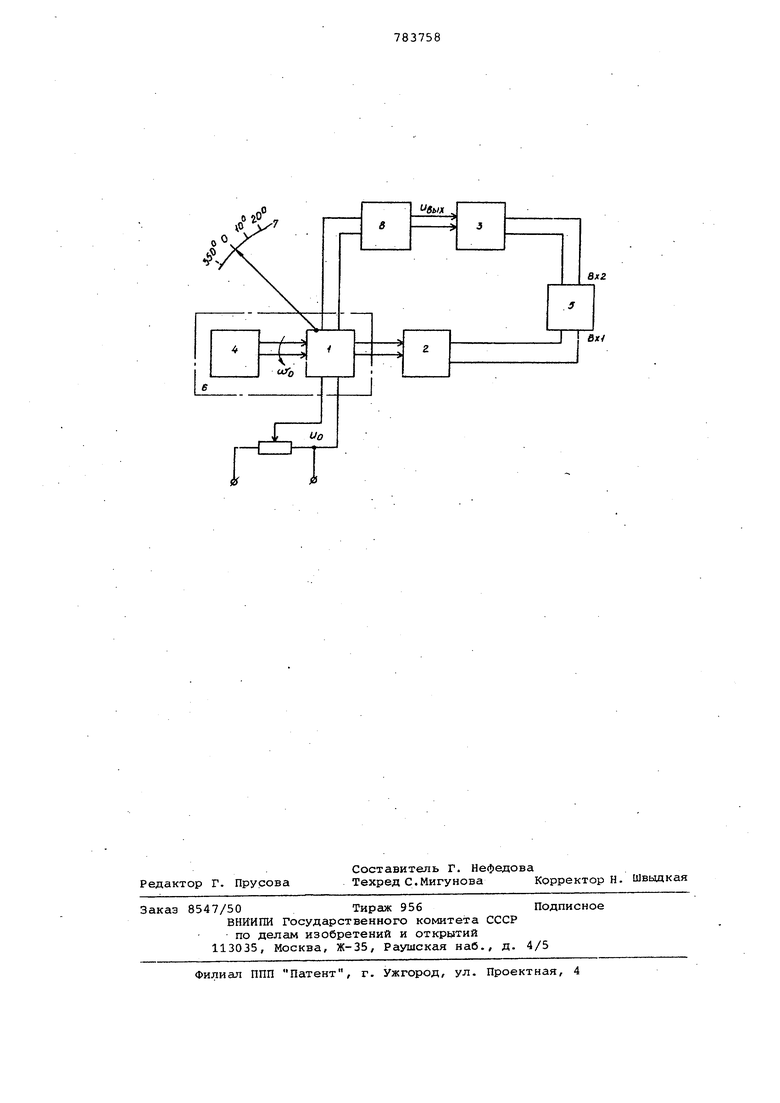
Указанная цель достигается за счет того, что в устройство, содержащее задающий генератор со шкалой, выполненный в виде синусного реостата с приводом регулируемой скорости, вы- ход которого подключен ко входу исследуемой системы, и измерительный блок, введены два формирователя кмпульсов, электрически не зависящие от сигналов задающего генератора.Ротор первого из них кинематически свя зан с ротором синусного реостата, а контакты, соединенные с обмотками подвижного статора реостата, подключ ны к nepBOfviy входу измерительного блока. Второй формирователь импульсо жестко соединен с выходом исследуемой системы и подключен ко второму входу измерительного блока. На чертеже представлена блок-схем устройства. Устройство состоит из синусного реостата 1, формирователей 2 и 3 импульсов, электромеханического при вода 4 регулируемой скорости и изме рительного блока 5. Реостат 1 и при вод 4 составляют электромеханиче кий генератор б. Ротор задающего генератора б расположен на одном валу с ротором формирователя 2 импульсов. Контакты форм рователя 2 соединены с обмотками по вижного статора синусного реостата Формирователи 2 и 3 импульсов могут быть выполнены в виде диска из непроводящего материала с проводящим участком и пары контактов. Статор синусного реостата может поворачиваться относительно статора формиро вателя 2 импульсов и жестко связан со стрелкой индикатора 7. Формирова тель 3 импульсов жестко соединен с выходом исследуемой системы 8. Принцип действия прибора основан на компенсации угла сдвига фаз иссл дуемой системы 8 углом поворота ста тора синусного реостата. На статор синусного реостата 1 п даётся питающее напряжение UQ с щеток этого синусного реостата, которые вращаются с частотой U)Q , снимается сигнал UobiftUJo который подается на вход исследуемой систем При этом с контактов формирователя на первый вход измерительного блока 5 поступает импульсный сигнал с пря угольным передним фронтом один раз за оборот генератора. Продолжительность импульсного сигнала может быт выбрана в зависимости от величины п одящего участка формирователя имульсов или за счет схемы электричесого формирователя. При этом перед подачей питающего напряжения на вход задающего генератора производят вытавку начального положения синусного реостата и контактов формироваелей 2 и 3, например момент замыкания контактов согласуется с нулем синусного напряжения (начало периода). Тогда при вращении ротора генератора с выхода формирователя 3 импульсов на второй вход исследуемой системы поступает импульсный сигнал с прямоугольнвдя передним фронтом, сдвинутый по времени относительно сигнала с контактной группы генератора на время, соответствующее измеряемому углу сдвига фаз. Компенсацию угла сдвига фаз осуществляют поворотом статора синусного реостата относительно первоначального положения, а момент совпадения передних фронтов импульсов фиксируется измерительным блоком. Формула изобретения Устройство для измерения сдвига фаз меяоду напряжениями, содержащее задающий генератор со шкалой, выполненный в виде синусного реостата с приводом регулируемой скорости, выход которого подключен ко входу исследуемой системы, и измерительный блок, отличающееся тем, что, с целью повышения точности устройства, оно содержит два формирователя импульсов, ротор первого из них кинематически связан с ротором синусного реостата, а контакты, соединенные с обмотками подвижного статора реостата, подключены к первому входу измерительного блока, а второй формирователь импульсов жестко соединен с выходом исследуемой cHCTeNM и подключен ко второму входу измерительного блока. Источники информации, принятые во внимание при экспертизе 1.Патент Англии №1390584,кл. 1U опублик. 1975. 2.Авторское свидетельство СССР 1 251048, кл. q 05 в 23/02, 1969 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ЧАСТОТНЫХ | 1969 |
|
SU251048A1 |
| Устройство для определения частотных характеристик систем автоматического регулирования | 1971 |
|
SU443366A1 |
| Преобразователь угол-код | 1974 |
|
SU490149A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Устройство для программного управления положением объекта | 1978 |
|
SU744466A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Преобразователь угол-код | 1977 |
|
SU720456A1 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |