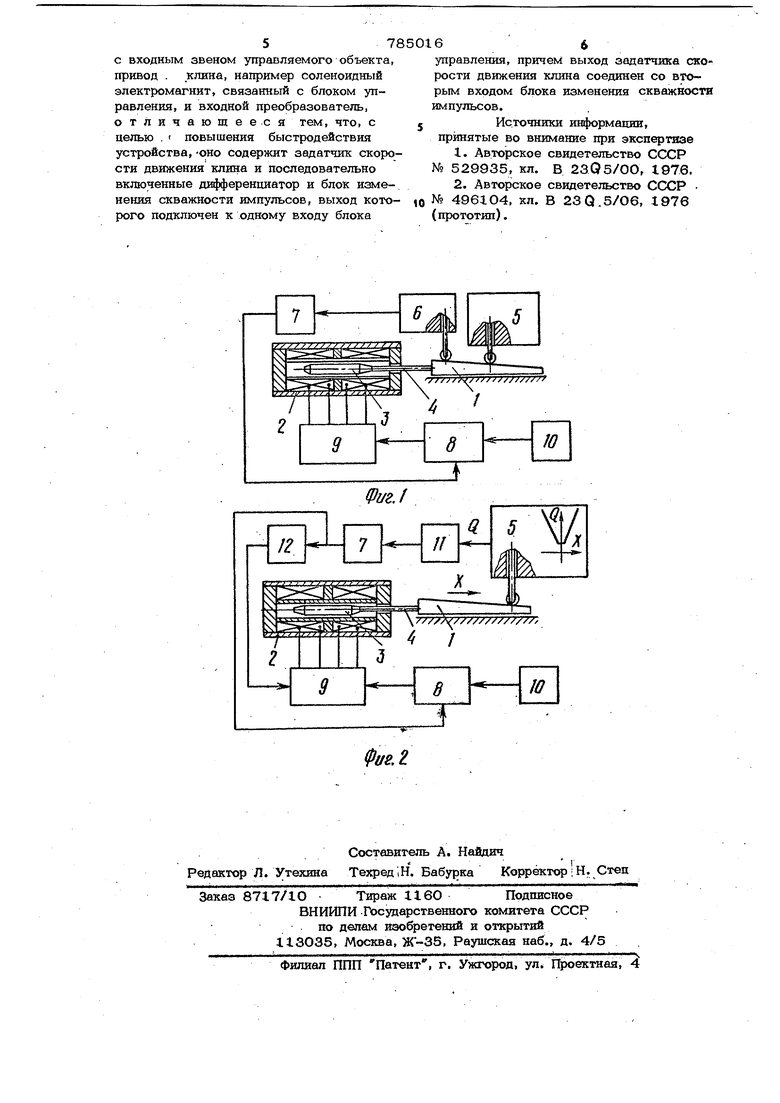
(54) УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ МАЛЫХ Изобретение относится к области машиностроения и может быть использован -в устройствах для реремещейия регулирующего органа различных управляемых объектов. Известно устройство для реализации малых перемещений с тонкой регулировкой управляемого объекта, вьтолненное в виде корпуса-, несущего кпин и винтов пару перемещения клина, воздействующ го на уступ в упруго-подагливой стенке контактирующей с управляемым объекTOM l. Недостатком устройства является низкое быстродействие из-за наличия в устройстве ин ционных механизмов. Известно устройство для реализации малых перемещений, содержащее клин, свясзанный с входным звеном управляемо го объекта, гидравлический привод клина связанный с блокам управления, в входной преобразр1затет 2 Недостатком такого устройства являе ся большое время запаздывания вачада ПЕРЕМЕЩЕНИЙ (окончания) движения клина от-начала (окончания) подачи . - сигнала на включение (отключение) подачи клина. Целью изобретения является повышение быстродействия устройства за счет исключения гидравлических инерционных узлов. Это достигается тем, что устройство содержит ааДатчик скорости движения клина и последовательно включенные дифференциатор и блок изменения скважности импульсов, выход которого подключен к одному входу блока управ1 ения, причем выход задатчика скорости движения клина соединен со вторьгм входом блока изменения скважности импульсов., На фиг. 1 .показана схема предлагае-. мого устройства со специальным входным преобр1аэователем; на фиг. 2 - схема устройства, встроенного в самонастраивающуюся систему управления. Устройство содержит клин I, привод клина, выполненный,например, в виде , сдвоенного соленоидного электромагнита 2, якорь 3 которого соединен тягой 4 378 с клином t, контактирующим с ВХОДНЬПУ звеном упракпя&лого объекта 5 и с входным преобразователем 6 перемещения клина I в аналоговый или цифровой сигнал. Выход входного преобразователя 6 последовательно соединен с дифференциатором 7, блоком 8 изменения скважности импульсов, выход которого подключен к одному входу блока 9 управления электромагнитом 2. Выход задах;;1ика 10 скорости движения клина I соединен со вторым входом блока 8 изменения скважности импульсов Устройство работает следующим образом. По сигналу с блока 9 управления электромагнитом 2 якорь 3 втягивается в правую или левую часть электромагнита, перемещая этим самым клин I, воздействующий на входное звено управляемого объекта 5 и на преобразователь 6 перемещения клина I. На выходе преобра -зоватепя 6 постоянно имеется аналоговы или цифровой сигнал, пропорциональныйперемещению клина I, например, от номинального положения, а на выходе дифференциатора 7 - сигнал, пропорциональный скорости перемещения клина. В блоке 8 изменения скважности импульсов производится сравнение действительнЪй скорости перемещения клина Vg определяемой ди||ференциатором 7, и требуемой V-j-, устанавливаемой задатчиком Ю. На выходе блока 8 изменения скажности импульсов в зависимости от требуемого направления перемещения клина I в правую или левую обмотку электромагнита 2 поступают импуль-: сы. Номинальная частота импульсов задается оператором по требуемой плавности хода клина 1, .а длительность определяется по. формуле . ( - длительность импульсов, поступающих в обмотку электромагнита; VY - требуемая скорост1ь пере мещения клина; Vg - действительная скорость переведения кшша; и К, коэффициенты пропорцио нальности. ЕСЛИ при настройке устройства было установлено равенство действительной CKojibcTH VQ перемещения клика 1 и тре буемой Чт, а потом под влиянием некоторых факторов стало,-нагфимер то длительность поступающих в обмотку электромагнита 2 импульсов увеличивается, увеличивается сила тяги электромагнита 2 и скорость перемещения клина I. Так происходит выравнивание действительной и требуемой скоростей движения клина. При встраивании предлагаемого устройства в самонастраивающиеся системы управления (фиг.2), которые имеют уже оследовательно соединенные оптимизатор 11 для выбора направления движения исполнительного механизма и блок 9 управления исполнительным механизмом, в качестве входного преобразователя может быть использован имеющийся в этих системах указатель качества управления 12, вход которого соединен с выходом управляемого объекта 5, а выход - с входом дифференциатора 7. В этом случае на выходе управляемого объекта 5 постоянно имеется фиксируемый указателем 12 аналоговый или цифровой сигнал Q , зависимость которого от перемещения X клина I достаточно точно описывается уравнением ,X|, -оптимизируемый показатель качества управления (например, давление, температура, перемещение, напряжение в управляемом объекте); -оптимизируемый показа.тель качества управления в оптимальном положении управляемого объекта; перемещение клина относительно его оптимального положения. На выходе дифференциатора 7 также устанавливается аналоговый или цифровой сигнал, пропорциональный действительной скорости перемещения клина Vg . По результатам сравнения этой действительной и требуемой скоростей перемещения клина с пометцью блоков 8 и 9 также изменяется длительность импульсов, поступающих в обмотку электромагнита 2. Таким образом, быстродействие пред ложенного устройства повышено за счет использования менее инерционных узлов, при одновременном сохранении регул1фовки плавности хода. Формула изобрете н,и я Устройство для реализации малых перемещений, содержащее клин, связанный с входным звеном управляемого объекта, привод . клина, например соленоидный электромагнит, связанный с блоком управления, и входной преобразователь, отличающееся тем, что, с целью . повышения быстродействия устройства, -оно содержит задатчик скорости движения клина и последовательно включенные дифференциатор и блок изменения скважности импульсов, выход которого подключен к одному входу блока 7 6 управления, причем выход задатчика скорости движения клина соединен со вторым входом блока изменения скважности импульсов. источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 529935, кл. В 23Q5/00; 1976. 2,Авторское свидетельство СССР № 496104, кл. В 23 Q.5/O6, . (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Следящая система | 1983 |
|
SU1105858A1 |
| Устройство для регулирования температуры | 1981 |
|
SU962884A1 |
| Вибрационное транспортирующее устройство | 1987 |
|
SU1465382A1 |
| Устройство для решения задач нелинейного программирования | 1974 |
|
SU480090A1 |
| Фотоимпульсный измеритель размеров объектов | 1990 |
|
SU1744464A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Многоканальный регулятор температуры | 1991 |
|
SU1783495A1 |
| Электропривод постоянного тока | 1990 |
|
SU1774451A2 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
1/е.г
