1
Изобретение относится к устройствам для осуществления подъемно-транспортных операций при передаче грузов с одной позиции на другую и может быть применено в любой отрасли промышленности - мебельной, в машино-. строении, при механизации складов и
ДРИзвестен подъемно-опускной стол,
или платформа, для перемещения грузов с одной позиции на другую 1 .
Однако необходимость установки отдельного привода для наклона платформы усложняет конструкцию и сужает эксплуатационные возможности/ так как наклон платформы производится только в одну сторону.
Наиболее близким к изобретению техническим решением является подъемно-опускной стол, содержащий подвижную платформу, состоящую из рамы и закрепленных на ней поперечин, шарнирно-рычажный механизм типа нюрбергских ножниц, на одних концах которых смонтированы элементы 1сачения, уста-; новленные с возможностью перемещения по горизонтальным пазам рамы,, и неподвижного основания, установленные на основании силовой цилиндр подъема и рольганг (2j .
.643 M« WrlVa3i «l3 i
Недостаток подъемно-опускного стола заклюЧжетЬя В тбй, р этрузка и загрузка подвижной платформы в её
Bep;xjreRf йсУлайёШй-ейп ййШ га егн-ёьбхо-5 димбстью йспбльзования дополнитель- ного ме5 Ганизма или мускульной силы
t,- y:t- l - . - - : t ,-,.,.---. ....--,. -- - -- рабочего.
Целью изобретения является расшиperfSfW функцй6 нальн ь1Х з6 зможностей
Ш подъёмно-опускнр го с тбйа путем наклона Шда|ЖнЬЙ Жат$6рмы.
Для этЪгЬ каждый горизонтальный паз рамы выполнен с расширяющимся к цен Т1ру11п тф6р№1 участ ком на плат15 форме установлена подвижная планка, снабженная фиксатором ее полоисений и перёкрывйМцая в одном из крайних своих полол ий частьГр асшйряюще гося
участка аза pawS. Л -
20 (Громе тго оТ планка можё быть выпo tl:Шl ШeШШйr 1f§gtшrёJШiIif зfplй;
. не{Р р§Ш Ш|раШШ ПЗ«1Г Ш паэа рЖмаГ .
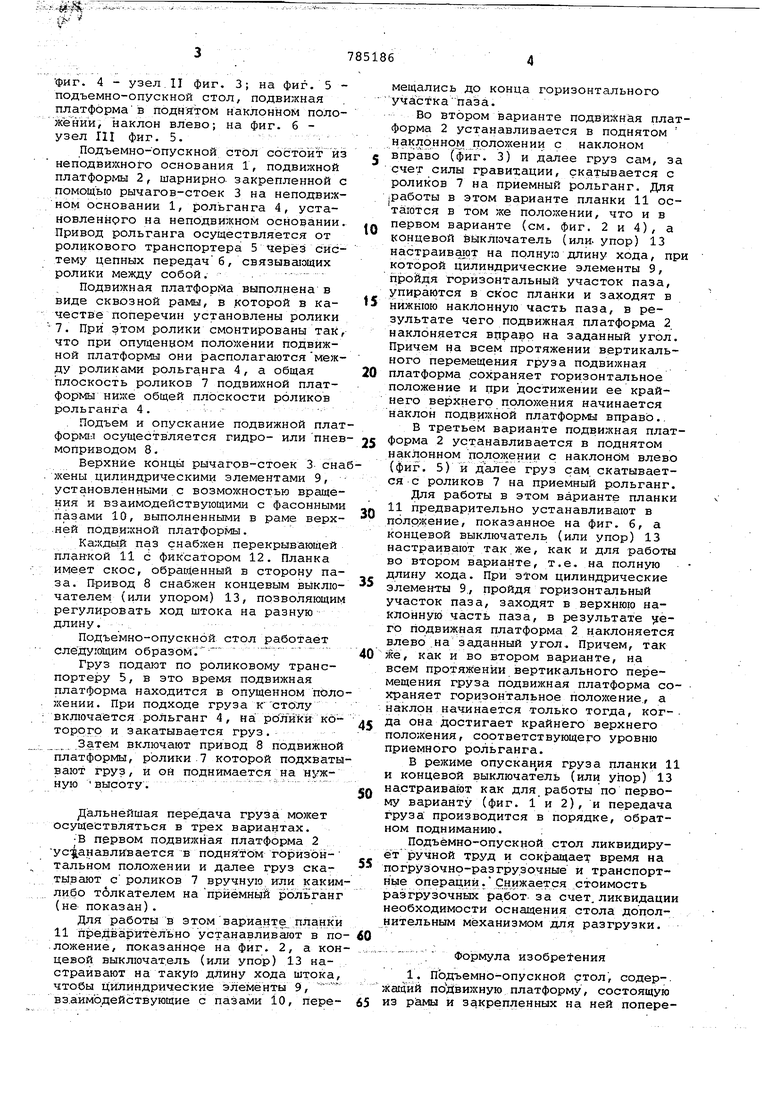
На фиг. 1 Гсхематично показан,
25 подъёмно-опускной стол, .подвижная
плат1 орШ Ъ |ЮДНятом го|рйз он альн6м поЛОЖеийй ;.на фиг.2 - узел Д Фиг. 1; на прдъемно Ь ускной стол,™ подвйГхная платформа в7поднят6м на-
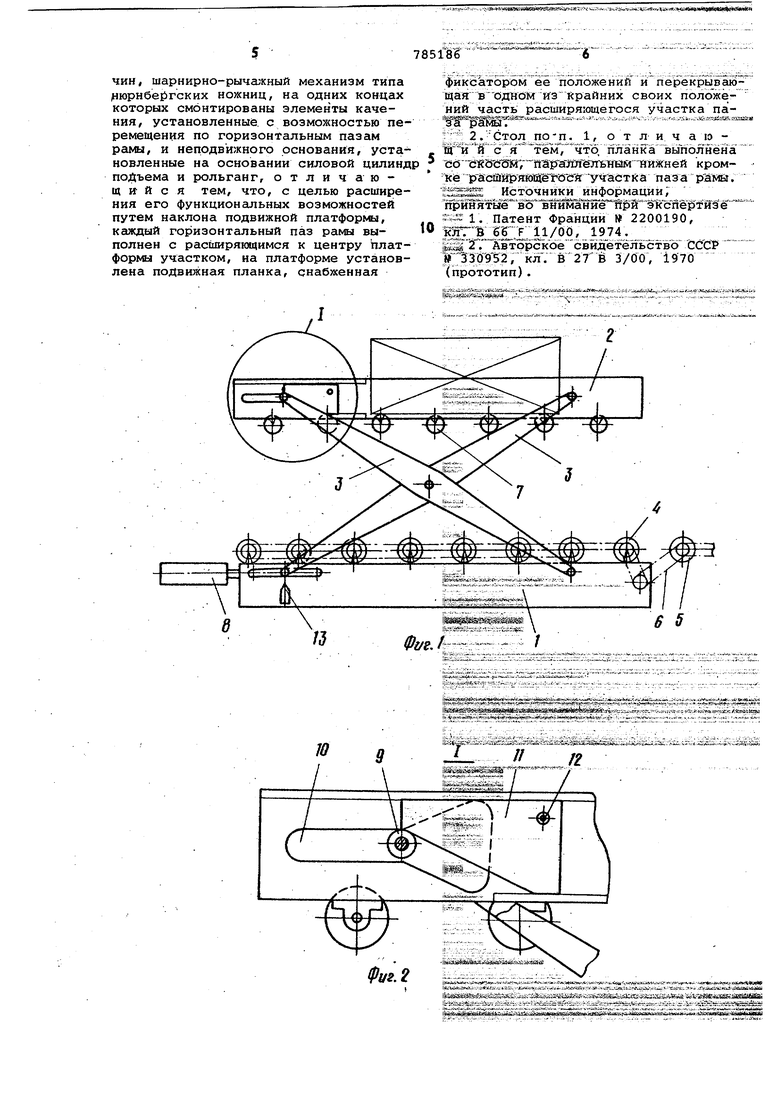
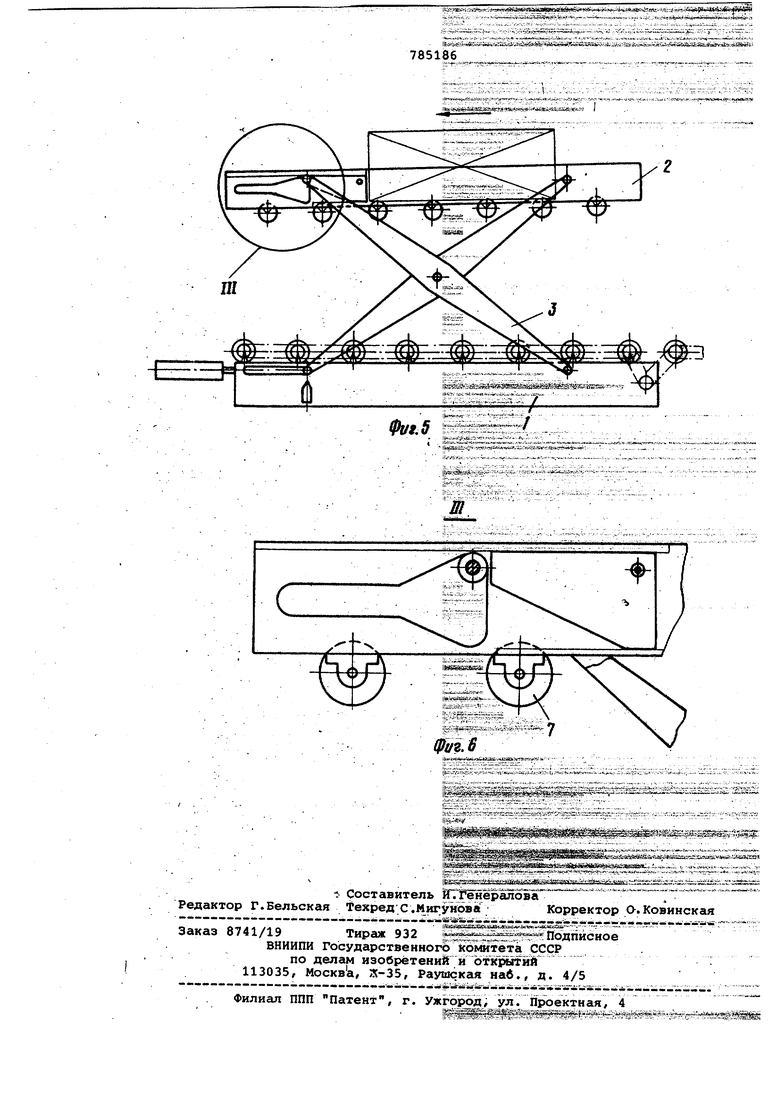
30 .клснщш полояс цш наклон вправо; на фиг. 4 - узел. II фиг. 3; на фиг. 5 подъемно-опускной стол, подвижная платформав поднятом наклонном положении, наклон влево; на фиг. б узел III фиг. 5. Подъемно-опускной стол состоит из неподвижного основания 1, подвижной платформы 2, шарнирно. закрепленной с помощью рычагов-стоек 3 на неподвижном основании 1, рольганга 4, установленного на неподвижном основании Привод рольганга осуществляется от роликового транспортера 5 Через систему цепных передач6, связывающих ролики между собой. Подвижная платформа выполнена в виде сквозной рамы, в которой в качестве поперечин установлены ролики 7. При этом ролики смонтированы так что При опутцениом положении подвижной платформы они располагаютсямежду роликами рольганга 4, а общая плоскость роликов 7 подвижной платформы ниже общей плоскости роликов рольганга 4. . Подъем и опускание подвижной плат форм1;1 осуществляется гидро- или пнев моприводом 8. Верхние концы рычагов-стоек 3- сна . жены цилиндрическими элементами 9, установленными с возможностью вращения и взаимодействующими с фасонными пазами 10, выполненными в раме верх.ней подвижной платформы. Ка;хдый паз снабжен перекрывающей план-кой 11 с фиксатором 12. Планка имеет скос, обращенный в сторону па за. П-ривод 8 снабжен концевым выключателем (или упором) 13, позволяющим регулировать ход штока на разную длину. . Подъемно-опускной стол работает следуЮ1цйм образом.- .-....,.-Груз подают по роликовому транспортеру 5, в это время подвижная платформа находится в опущенном пол жении. При подходе груза к столу : включается рольганг 4, на рбЯйкй к:6 торогр и закатывается груз. Затем включают привод 8 подвижно платформы, ролики 7 которой подхват вают груз, и он поднимается на нужную высоту. Дальнейшая передача груза может осуществляться в трех вариантах. В первом подвижная платформа 2 усЗ анавливается в поднятом горизонтальном положении и далее груз скатывают с роликов 7 вручную или каки либо толкателем на приёмный рольган (не показан). Для работы в этомварианте планк 11 предваритёльно устанавливают в п Сложение, показанное на фиг. 2, а ко цевой выключатель (или упор) 13 настраивают на такую длину хода штока чтобы цилиндрические элементы 9, вз.аимодействующие с пазами 10, пере мещались до конца горизонтального участкаnaiSa. Во втором варианте подвижная платФорма 2 устанавливается в поднятом наклонном положении с наклоном вправо (фиг. З) и далее груз сам, за счет силы гравитации, скатывается с роликов 7 на приемный рольганг. Для .работы в этом варианте планки 11 остаются в том же положении, что и в первом варианте (см. фиг. 2 и 4), а концевой выключатель (или- упор) 13 настраива1от на полную длину хода, при которой цилиндрические элементы 9, пройдя горизонтальный участок паза, упираются в скос планки и заходят в нижнюю наклонную часть паза, в результате чего подвижная платформа 2 наклоняется вправо на заданный угол. Причем на всем протяжении вертикального перемещения груза подвижная Платформа сохраняет горизонтальное положение и при достижении ее крайнего верхнего положения начинается наклон подвижной платформы вправо.. В третьем варианте подвижная платформа 2 устанавливается в поднятом наклонном положении с наклоном влево (фиг. 5) и далее груз сам скатывается с роликов 7 на приемный рольганг. Для работы в этом варианте планки 11 предварительно устанавливают в полржение, показанное на фиг. б, а концевой выключатель (или упор) 13 настраивают так же, как и для работы во втором варианте, т.е. на полную длину хода. При этом цилиндрические элементы 9., пройдя горизонтальный участок паза, заходят в верхнюю наклонную часть паза, в результате его подвижная платформа 2 наклоняется влево на заданный угол. Причем, так же, как и во втором варианте, на всем протяжении вертикального перемещения груза подвижная платформа сохраняет горизонтальное положение., а наклон начинается только тогда, ког- да она достигает крайнего верхнего положения, соответствующего уровню приемного рольганга. В режиме опускан ия груза планки 11 и концевой выключатель (или упор) 13 настраивают как для работы по первому варианту (фиг. 1 и 2), и передача груза производится в порядке, обратном подниманию. : Подъёмно-опускной стол ликвидирует ручной труд и сокращает время на погрузочно-разгрузочные и транспортные операции.Снижается стоимость разгрузочных ра.бот за счет, ликвидации необходимости оснащения стола дополнительным механизмомДля разгрузки. Формула изобретения 1. Подъемно-опускной стол, содер-. жа1ций подвижную платформу, состоящую из рамы и закрепленных на ней поперечин, шарнирно-рычажный механизм типа |Нюрнбе гских ножниц, на одних концах которых смонтированы элементы качения, установленные с возможностью перемещения по горизонтальным пазам рё1мы, и неподвижного основания, установленные на основании силовой цилинд по {ъема и рольганг, отличающийся тем, что, с целью расширения его функциональных возможностей путем наклона подвижной платформы, каждый горизонтальный паз рамы выполнен с расширяющимся к центру платформы участком, на платформе установлена подвижная планка, снабженная
фиксатором ее положений и пёр екрывайщая В ОДНОМ и з Крайних своих положеНИИ часть расширяющегося участка nai (...rv-J.-чA л--;v...;й-;.:;i.
;; 2 .Стол no-jt. 1, о т л и ч а 10 тем ,что, планка выполнёна t:O aKot:mi7 MFa W e nbi4lM -H« кромtce р астйряюШё гОеж тчайтка паза рама. tS Источники информации; ЩШ ятае во1нитШГё п ;й §кЪпертизё --- 1. Патент Франции 2200190,
; г;|П5;г;г11/оо, 1974.
JES S r ABTOpckbe cjBHaefeSbCTBO СССР к/Г. В 2ГВ 3/00, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-опускной стол | 1985 |
|
SU1383700A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
| Укладчик листов в пакеты на поддоны | 1979 |
|
SU821356A1 |
| Устройство для перегрузки изделий | 1990 |
|
SU1773812A1 |
| ТРАНСПОРТАБЕЛЬНЫЙ БОРТОВОЙ ПОДЪЁМНИК | 2015 |
|
RU2602269C2 |
| Тележка для перевозки штучных грузов | 1975 |
|
SU550309A1 |
| Установка для резки листового материала | 1986 |
|
SU1369876A1 |
| УНИВЕРСАЛЬНЫЙ БОРТОВОЙ ПОДЪЕМНИК ДЛЯ ПАССАЖИРОВ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ | 2019 |
|
RU2726211C1 |
| ШТАБЕЛЕУКЛАДЧИК ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1973 |
|
SU362766A1 |
I &1Ж;в.ЕГ:«« СЦ « ЛиЧгиЖ - 1 А-:
cKsiibc jft-JtBii-itteai ,«.. xaiJtte ffi U LiLLK .HSiSttit&ili фуг, 5
li.aiffl...vj,-l;.Vii-.iS«-rl IfeiJVKJWii K JiS - :. iteS -a.-j
