:Изобретение относиуся к подъемно- транспортным устройствам и может быть использовано для загрузки и разгрузки складов или транспортных средств через загрузочный проем в дне или боковой стенке.
Цель изобретения - расширение функциональных возможностей путем вьщвижения подвижной платформы. . Q
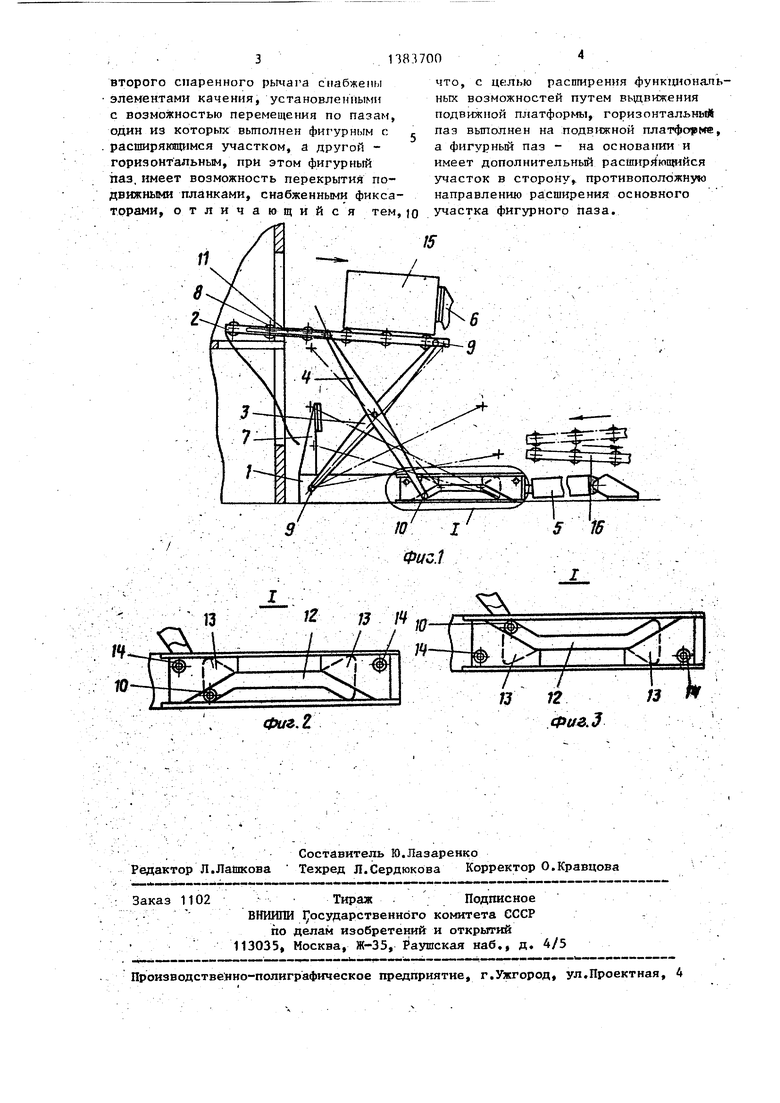
На фиг. 1 изрбражен подъемно-опу-- скной стол, общий вид; на фиг. 2 узел I на фиг, 1 (для положения сто- ла в режиме разгрузки); на фиг, 3 - узел 1 на фиг,1 (для положения стола 15 в режиме загрузки).
Подъемно-опускной стол состоит из неподвижного основания 1, подвижной платформы 2, шарнирно закрепленной с помощыо спаренных рычагов 3 20. и 4 на неподвижном основании, сипо- вого цилиндра 5, верхнего 6 и нижнего 7 упоров,
. Подвижная платформа вьтолнена в виде сквозной рамы, в котором в ка- 25 честве поперечин установлены ролики
8о Упоры 6 и 7 закрештены на непод- вижном основании, отдельном фунда. менте или на окружающих конструкциях так, ЧТО-попадают между роликами 8 30
и не препятствуют, дбижению платфор- . .. мы 2,
Концы спаренного рычага 3 свйзаны с неподвижным основанием и подвижной
35
платформой с помощью шарниров 9, а .концы спаренного рычага 4 снабжены . элементами качения 10, взаимодейст- в5Ш)щими с горизонтальными пазами 11 подвижной платфог мы и фигурными па- Q
зами 12 неподвижного основания, Спаренные рычаги 3 и 4 шарнирНо соединены между собой в средней части.
Шток шарнирно закрепленного на неподвижном основании или фундаменте д сиЛового цилиндра 5 шарнирно соединен с концом спаренного рычага 4, Фигур- . ные. пазы 12 частично перекрыты подвижными планками 13 с фиксаторами 14, Планки 13 имеют скос, обращенный
в сторону паза и параллельньй кромке расширяющихся участков паза. Груз 15 должен быть установлен так, чтобы можно-бьщо подвести под него подвижную платформу. Для подачи грузов к столу при его работе в режиме за- груаки и приема грузов от стола при его работе в режиме разгрузки может быть использован нпприводный роль55
0.
5
0
5
Q
5
Ганг 16 с регулированием угла наклона,,
Подъемно- опускной стол работает следующим образом.
При загрузке груз 15 скатывается по наклонному рольгангу 16 на ролики 8 находящейся в нижнем положении подвижной платформы 2 до упора 7,
Затем включается силовой цилиндр 5 и платформа 2 с грузом поднимается,. совершая Сложное движение. Двигаясь по пазам 11 и 12, элементы качения 10 обеспечивают выдвижение платформы влево. Кроме того, при переходе нижних элементов качения с правого наклонного участка пазов 12 на гори- зонтальньш участок (см,фиг,3) платформа 2 устанавливается горизонталь - но и поднимается в таком положении до уровня полки загружаемого объекта. При переходе нижних элементов качения С Горизонтального участка на левый наклонный участок пазов 12 платформа 2 вновь наклоняется влево и груз по роликам 8 скатывается на полку, ., . . .
Платформа 2 опускается и цикл загрузки повторяется.
При разгрузке при включении Силового цилиндра 5 элементы качения 10 также копируют пазы 11 и 12 (.см, фиг.2). При этом, совершая сложное движение, платформа 2 подводится под груз и снимает его с полки, В конце подъема нижние элементы качения 10 взаимодействуют с левым наклонным участком паза 12 и обесп ечи- вают наклон платформы с грузом вправо. Под действием собственной массы он скатывается по роликам 8 до упора 6.
При обратном ходе силового цилиндра платформа устанавливается в гори- ,зонтальное положение и опускается. В конце хода при переходе нижних элементов качения на первый наклонный участок платформа наклоняется вправо и груз под действием собственной массы по роликам 8 скатывается на рольганг 16,
Ф о р. м у л а изобретения
Подъемно-опускной стол, содержащий неподвижное основание, подвижную ппатформу с роликами, шарнирно-ры- чажньй механизм, одни концы первого спаренного рычага шарнирно закреплены на подвижной платформе, а концы
второго спаренного рычага снабжены элементами качения, установленными с возможностью перемещения по пазам, один из которьтх вьтолнен фигурным с , расширянщимся участком, а другой - горизонтальным, при этом фигурный паз, имеет возможность перекрытия подвижными планками, снабженными фиксаторами, отличающийся тем,jg
что, с целью распгирения функ1шонапь- ных возможностей путем вьщвижения подвижной платформы, горизонтальный паз выполнен на подвижной платформе, а фигурный паз - на основатт п имеет дополнительньй расширившийся участок в сторону, противоположную направлению расширения основного участка фигурного паза.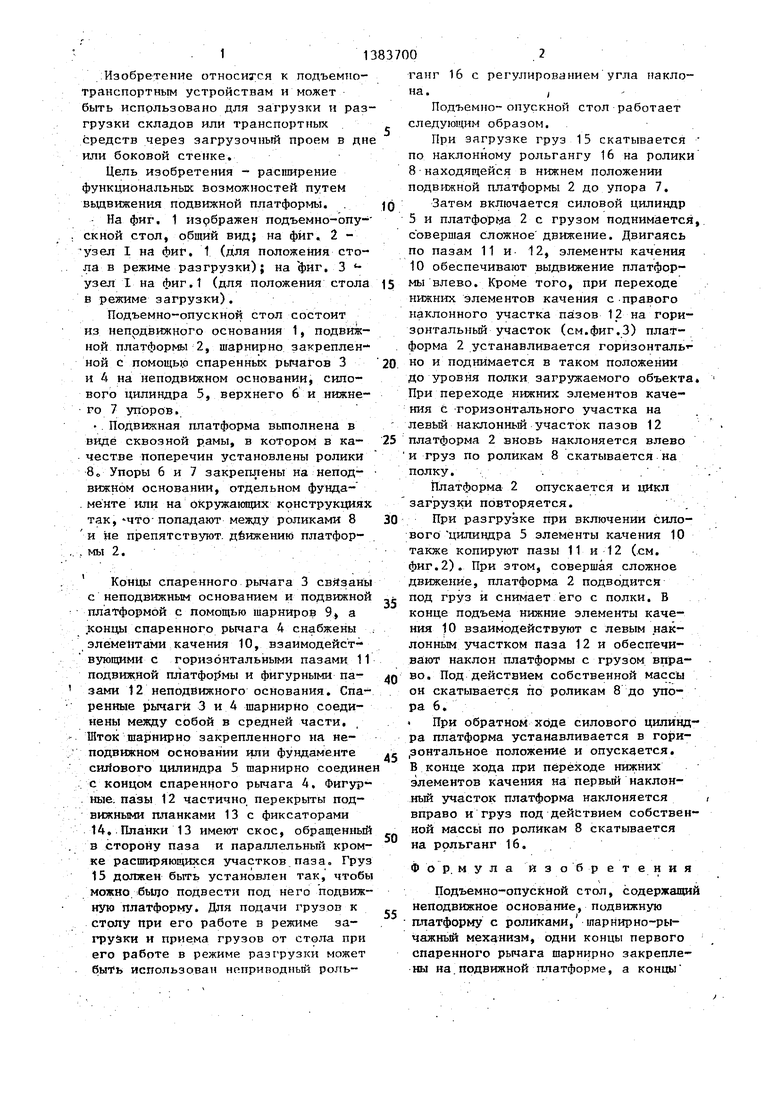
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-опускной стол | 1978 |
|
SU785186A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
| Перегрузочное устройство | 1988 |
|
SU1553481A1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1981 |
|
SU988709A1 |
| СТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ПОДВЕСНОГО КОНВЕЙЕРА | 1985 |
|
SU1277544A1 |
| Склад для хранения изделий | 1979 |
|
SU804545A1 |
| Устройство для загрузки и разгрузкипОдВЕСНОгО КОНВЕйЕРА | 1978 |
|
SU819005A1 |
| Устройство для укладки изделий в тару | 1986 |
|
SU1386515A1 |
Изобретение относится к подъемно-транспортным устройствам. Цель изобретения - расппфение функциональных возможностей путем вьщвижения подвижной платформьи Подвижная, снабженная роликами 8, платформа 2 силовым цилиндром 5 посредством установ ленного на неподвижном основании 1 шарнирно-рычажного механизма, переводится из н аклонного положения в горизонтальное, поднимается с одновременным вьщвижением и вновь перево- дится в наклонное Положение в сторону вьщвижения при загрузке, и в обратную - при разгрузке. Направление наклона задается установкой подвижных планок а фиксаторами. Для ограничения гравитационного перемещения штучных грузов по роликам 8 в верхнем и нижнем положении платформ7з1 подъемно-опускной стол снабжен упорами. 3 ил.
12 0 /
/ I СФ}|
Фиг.2
/
| Подъемно-опускной стол | 1978 |
|
SU785186A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| . | |||
