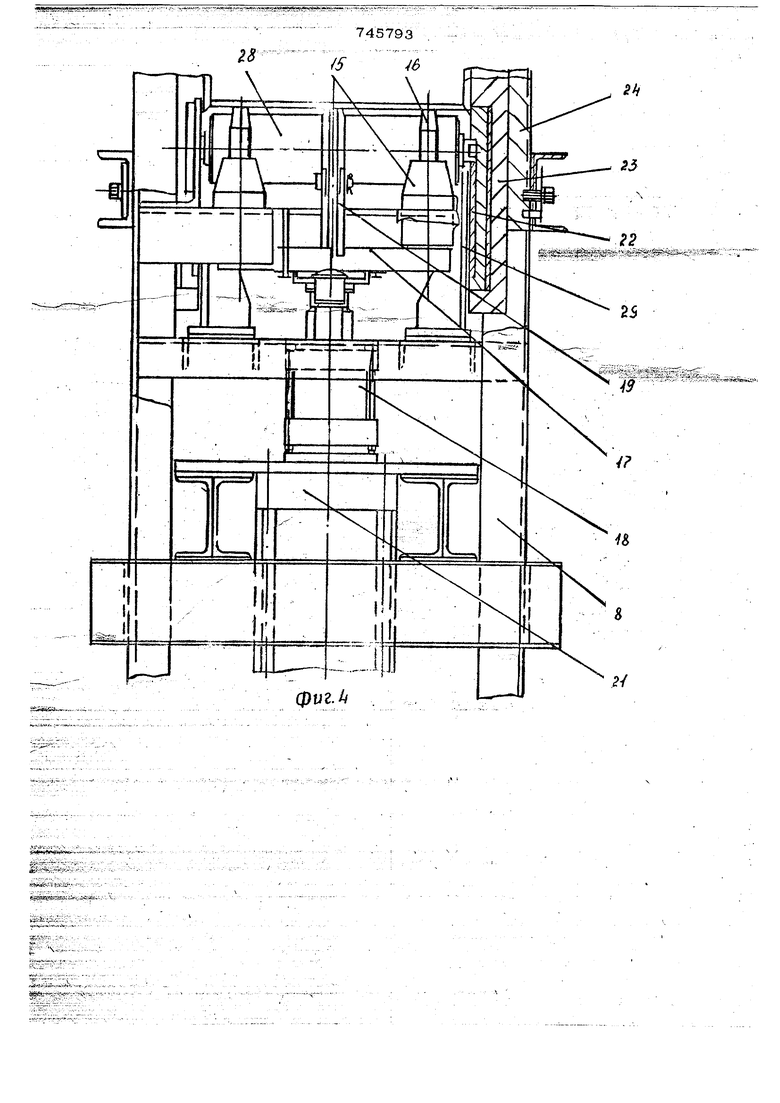
Изобретение относится к промышпенному транспорту, а именно к устройствам для хранения и транспортирования штуч Ных изделий. Известно устройство для хранения и транспортирования штучных изделий, содержащее накопитель в виде наклонных направляющих, загружаетлых цепным элеватором l. Известны также устройства для хранения и транспортирования штучных изделий содержащие накопитель, подводящий и отводящий конвейеры, шахту с подъемноопускным столом 2. Недостатком указанных устройств является то, что они не обеспечивают транс портирования изделий в обход накопителя, что снижает транспортно-технологические возможности устройства. Цель изобретения - расширение транспортно-технологических возможностей уст ройства путем транспортирования изделий как через накопитель, так и в обход его. Это достигается тем, :что между отводящим конвейером и щахтой установлен рольганг, на котором расположены выдвижные упоры, двуплечий рычаг и взаимодействующий с ним конечный выключатель, а взаимно-опускной стол снабжен боковыми щеками, жестко соединенными с вертикальными штангами, несущими подпружиненные поворотные упоры и расположеннььми в неподвижных направляющих, закрепленных на одних из стенок шахты, на дру- гих стенках которой установлены подпружиненные упоры, смещенные относительно поворотных упоров вертикальных штанг, при & том боковые щеки стола выполнены с вертикальными пазами, в которых расположена ось с установленным на ней опорным роликом, взаимодействующая с неподвижными упорами, закрепленнь1ми в шахте. На фиг. 1 изображено устройство, вид сбоку; нафиг. 2 - то же, вид в плане; на фиг. 3 - привод и стол подъемного устJюйcтвa, вТад сбоку; на фиг. 4 - вид по стрелке А на фиг. 3 на фкг. 5 - стоп подъемного устройства, вид сверху; на фиг. 6 - узел 1 на фиг. 1; на фиг. 7 отсекатель на нижнем витке накопителя. Устройство для хранения и транспорти рования штучных изделий содержит винтовой роликовый накопитель 1, подводящий 2 и отводящий 3 роликовые конвейеры, подъемный механизм 4. Накопитель 1 имеет опорные ролики 5 установленные в опорах 6, закрепленных на раме 7. К раме 7 прикреплена шахта 8 подъемного механизма. Над шахтой 8 напротив направляющего рольганга 9 накопителя расположено передаточное устройство Ю, содержащее призму II, связанную с силовым цилиндром 12. Отвод5П11Ий роликовый конвейер 3 примыкает к нижнему витку накопителя и закреплен на его раме 7. Между отводящим конвейером 3 и шахтой 8 подъемног механизма установлены рольганг 13, при мыкающий к нижнему витку накопителя и расположенный на уровне стола 14 подъемного механизма при нижнем положении стола. На рольганге 13 установлены направляющие 15, в которых расположены выдвижные упоры 16, закрепленные на планке 17, соединенной со штоком силового цилиндра 18. На планке закреплен двупле чий рычаг 19 и конечный выключатель 20, взаимодействующий с рычагом 19. Стол 14 подъемного механизма установлен на штоке силового цилиндра 21 и снабжен боковыми щеками 22, жестко соединенными с вертикальными штангами 23, расположенными в неподвижных направляющих 24, закрепленных на стенках шахты 8. На штангах 23 шарнирно установлены подпружиненные поворотные упоры 25, расстояние между которыми соответствует габаритам rpyda. На других стенках шахты, свободных от направляющих, шарнирно закреплены подпружиненны упоры 26 на таком же расстоянии друг от друга, как и упоры 25, но смещены относительно последних. В боковых щеках 22 выполнены вертикальные пазы, в кото рых располагается ось 27 опорного ролика 28. При нижнем положении стола 14 ось 27 взаимодействует с упорами 29, установленными в шахте на неподвижн л , основании 30. На подводящем конвейере 2 установле отсекатель 31, а на нижнем витке накош теля 1 - отсекатель 32, представляющий собой двуплечий рычаг с упорами 33 и 7 34 34, одно плечо которого связано со Читоком силового Цилиндра 35. На направляющем рольганге 9 и подводящем конвейере 2 установлены датчики соответственно 36 и 37, которые контролируют наличие груза. Устройство работает следующим обр&зом., На устройствах электроавтоматики (на чертеже не показаны) устанавливае-пся программа, предусматривающая работу либо через накопитель, либо - в обход его. В последнем случае отсекатель 31, упоры 16 и рьгчаг 19с наконечным выключателем 20 устанавливаются ниже уровня опорных роликов, и грузы поступают через стол 14 подъемного механизма и через рольганг 13 на отводящий конвейер 3. Если программа предусматривает работу через накопитель 1, то отсекатель 31 поднимается своим силовым цилиндром, а цилиндр 18 выдвигает по направляющим 15 упоры 16-и выставляет рычаг 19 одним плечом между опорными роликами. Груз поступает на подводящий конвейер 2 и останавливается отсекателем 31. При отсутствии груза на столе 14, что подтверждается конечным выключателем 20 от рычага19, датчик 37 дает команду на опускание отсекателя 31, и груз поступает на стол 14, где, остановленный упорами 16, располагается на ролике 26 и на соседних роликах рольгангов 13 и 2. Срабатывание конечного выключателя 2О дает команду на подъем силового цилиндра 21. Стол 14 подни мается, подхватывая груз, а ролик 28, оставшийся на упорах 29, при дальнейшем подъеме стола 14 подхватывается торцами вертикальных пазов щек 22, в которых расположена ось 27 ролика. Вместе со столом 14 поднимаются штанги 23 по направляющим 24. Груз, расположенный на столе 14, отжимает первую пару подпружиненных упоров 26, проходит выше, освобождая упОры 26, и останавливается. После этого цилиндр 21 возвращается i в исходное нижнее положение, оставив груз на упорах 26. На стол 14 поступает новый груз и при следующем подъеме цилиндра 21 этот груз поступает на первую пару упоров 26. Одновременно при втором подъеме цилиндра 21 первый груз снимается с первой пары упоров 26 упорами 25, установленными на штангах 23, и переносится на вторую пару упоров 26,
Поспе каждого подъема, цилиндра 21 при его приходе в исходное |1рлО5кеййе срабатывает ЦИЛИНДР 12, топкая призму 11, охватывающую груз, установленный на верхней паре упоров 26. Призма 11 перемешает груз с упоров 26 на опорные ролики направляющего рольганга 9, по которому груз скатывается в накопитель 1 до остановки упором 33 отсекателя 32.
При заполнении накопителя 1 датчик 36, не освободившись от последнего груза, не дает разрешения на подъём цилиндра 21, и устройство автоматически переходит на работу по другой программе - в обход накопителя.
При необходимости разгрузки накопителя 1 ципиндр 35 опускает упор 33, упор 34 при этом поднимается.
Таким образом, первый груз, освобождаясь, выкатывается из накопителя на ртводяший конвейер 3, а остальные грузы удержиБаются упором 34. При возврате цилиндра 35 в исходное положение упор 33 поднимается и принимает на себя вСе оставшиеся грузы. Далее цикл повторяется
Формула изобретения
Устройство для храненияи транспорти-30 рования штучных изделий, содержащее накопитегпь, подводящий и отводящий конвейеры, подъй гно-опускной стол, расположенный в шахте, о т л и ч а ю щ е е с яГ тем, что, с целью расширения транспортнб технологических возможностей устройства путем транспортирования изделий как через накопитель, так и в обход его, между отводя,м конвейером и шахтой установлен рольганг, на котором расположены выдвижные упоры, двуплечий рычаг и взаимодействующий с ним конечный выключатель, а подъемно-опуркной стол снабжая боковыми щеками, жестко соединенными с вертикальными штангами, несущими подпружиненные поворотные упоры и расположенными в неподвижных направляю щих, закрепленных на одних из стенок шахты, на других стенках которой установлены подпружиненные упоры, смещенные относительно поворотных упоров вертикальных штанг, при этом боковые щеки стола выполнены с вертикальными пазами, в которых расположена ось с установленным на ней опорным роликом, взаимодействующая с неподвижными упорами, закрепленными в шахте.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 366126, кл. В 65:G 1/02, 1S67.
2.Авторское свидетельство СССР № 435995, кл. В 65 G 1/04, 1970 (прототип).
/ J
9Л
Фиг.з
фvг.
/J )0
2« гз гз /4
I / /
-г 7 I/


| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Штанговый конвейер для перемещения штучных грузов | 1979 |
|
SU874519A1 |
| Автоматизированный комплекс для штамповки деталей из полосового материала | 1985 |
|
SU1296269A1 |
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |
| Устройство для передачи плоских изделий с одного конвейера на другой | 1980 |
|
SU905176A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ | 1969 |
|
SU236307A1 |
| Устройство для укладки штучных изделий | 1982 |
|
SU1123941A1 |
| Устройство для передачи штучных грузов | 1981 |
|
SU971745A1 |
| Пакеторазборная машина для штучных грузов | 1979 |
|
SU889575A1 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1761648A2 |




QudA
Фиг. 7
