1
Изобретение относится к швейному машиностроению, а именно к механизмам швейных машин, предназначенных для автоматической сборки заготовок обуви.
Известен механизм двигателя обувных деталей на швейной машине, содержаший нижний и верхний транспортирующие ролики, каждый из которых установлен на горизонтальном рычаге, связанном со следящей пневмосистемой, имеющей датчик положения края детали Ij.
Недостатком известного устройства является наличие в механизме длинных кинематических цепей управления, что резко сказывается на синхронизации работы двух транспортирующих роликов и ухудшает работоспособность следящей системы. Кроме того, известный механизм имеет ограниченную область применения.
Цель изобретения - устранение указанных недостатков и повышение надежности механизма в работе.
Указанная цель достигается тем, что механизм двигателя обувных деталей на швейной мащине содержит нижний и верхний транспортирующие ролики, каждый из которых установлен на горизонтальном рычаге.
связанном со следящей пневмосистемой, име ющей датчик положения края детали, причем механизм дополнительно имеет держатели транспортирующих роликов, каждый из которых охватывает торец соответствующеJ го ролика и связан со следящей пневмосистемой, а каждый из роликов соединен с горизонтальным рычагом посредством щарового шарнира, причем датчик положения края одной из деталей установлен на соответствующем держателе.
Кроме того, механизм имеет горизонтальную разделительную пластину для деталей, расположенную между транспортирующими роликами и свободно установленную на плат форме швейной машины посредством штифта.
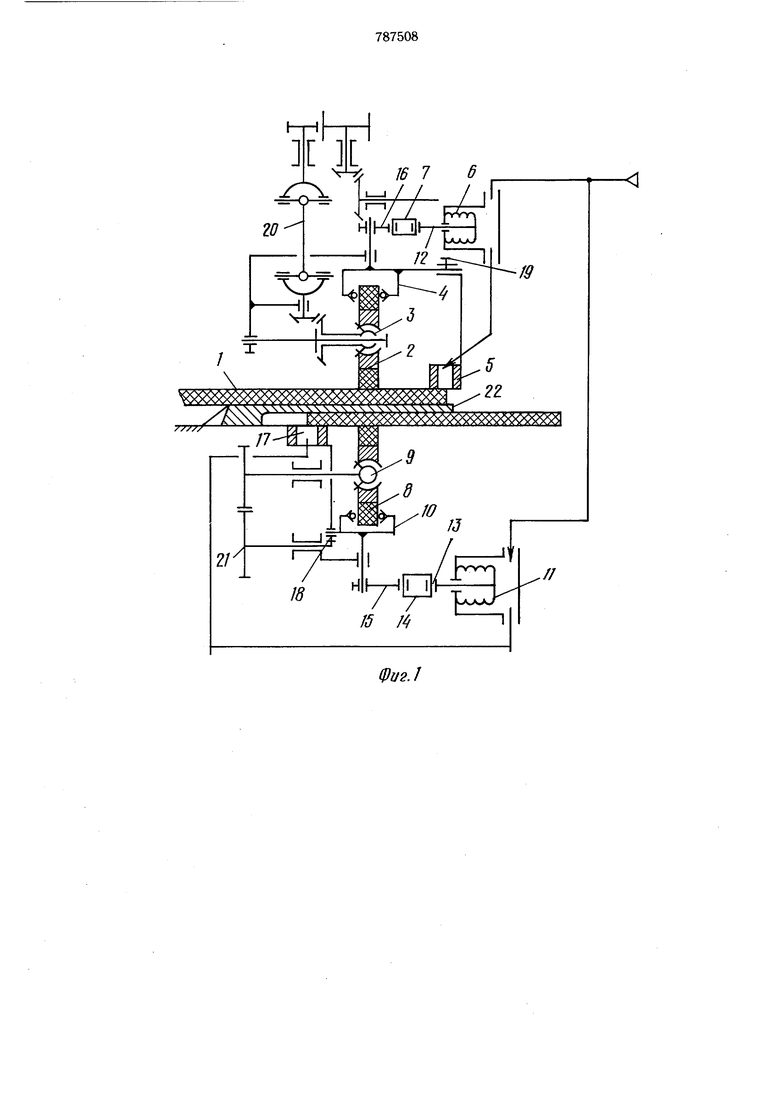
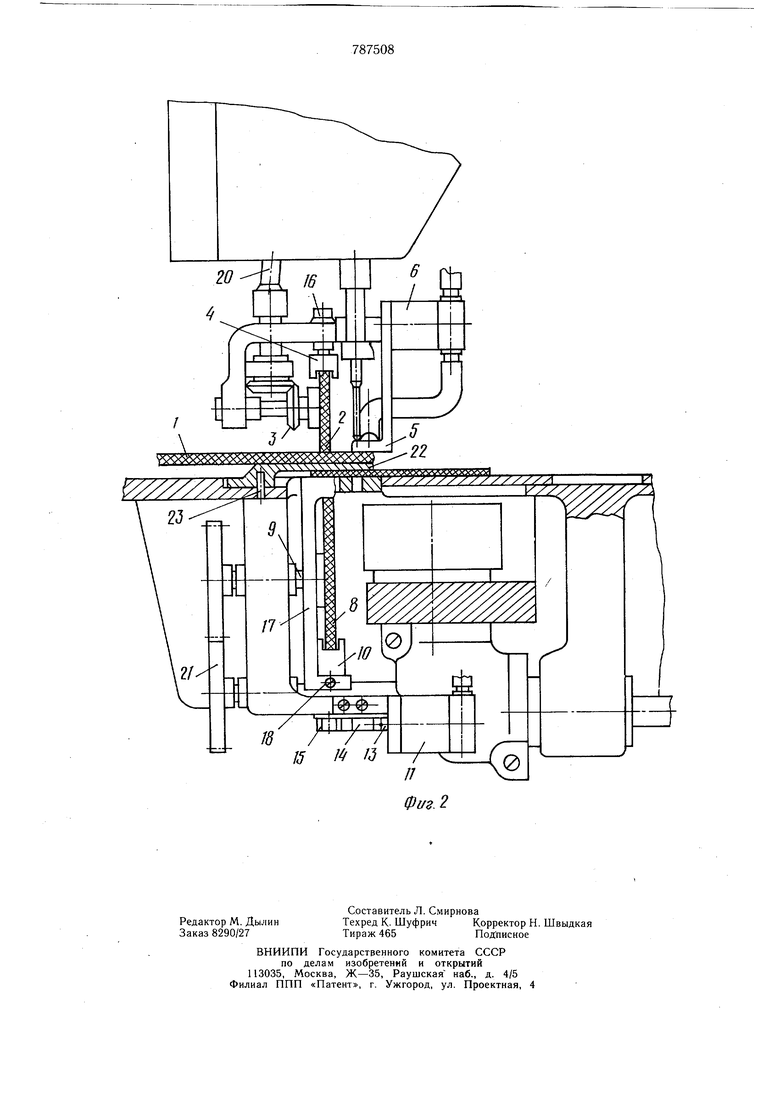
На фиг. 1 изображена кинематическая схема механизма; на фиг. 2 - конструкция механизма.
Механизм содержит нижний 1 и верхний 2 транспортирующие ролики, установленные на горизонтальных рычагах соответственно 3 и 4, связанных через соединительные звенья 5 и 6 со штоками 7 и 8 сильфонов 9 и 10 следящей системы, транспортирующие ролики 1 и 2 установлены на приводных шаровых пальцах 11 и 12, вставленных в держатели 13 и 14, причем каждый из держателей охватывает торец соответствующего транспортирующего ролика 1 и 2. Держатели 13 и 14 жестко соединены с горизонтальными рычагами 3 и 4 и через них связаны со следящей пневмосистемой. На держателях 13 и 14 винтами 15 и 16 установлены датчики положения края одной из деталей - сопла 17 и 18. Шаровые пальцы 11 и 12 кинематически связаны соответственно с приводом 19 нижнего транспортирующего ролика 1 и приводом 20 верхнего ролика 2. Кроме того, механизм имеет горизонтальную разделительную пластину 21 для деталей 22, расположенную между транспортирующими роликами 1 и 2 и свободно установленную на платформе 23 щвейной мащины посредством штифта. Механизм двигателя обувных деталей на щвейной машине работает следующим образом. Детали заготовки заправляются под транспортирующие ролики 1 и 2. При перемещении деталей транспортирующими роликами положение их остается неизменным если давление в измерительных сильфонных камерах не меняется. В случае смещения края детали, например верхней, изменяется давление в камере сильфона 10, что влечет за собой перемещение приводного шарового пальца 8, соединительного звена 6 и поворот рычага 4. При этом держатель 14 разворачивает транспортирующий ролик 2 на шаровом пальце 8 и соответственно поворачивается сопло 18. Поворот транспортирующего ролика 2 и сопла 18 происходит до тех пор, пока давление в измерительной камере не достигнет исходного значения. Разворот ролика вызывает изменение направления перемещения детали, что в конечном счете и обеспечивает непрерывную ориентацию детали под иглой. Аналогично изменяется направление подачи и нижней детали, что позволяет осуществлять ориентацию деталей заготовки обуви при стачивании их без предварительной фиксации. Разделение управления положения транспортирующего ролика и его привода позволяет обеспечить постоянство скорости подачи деталей при стачивании и повысить надежность механизма в работе. Формула изобретения 1.Механизм двигателя обувных деталей на швейной машине, содержащий нижний и верхний транспортирующие ролики, каждый из которых установлен на горизонтальном рычаге, связанном со следящей пневмосистемой, имеющей датчик положения края детали, отличающийся тем, что, с целью повыщения надежности, он имеет держатели транспортирующих роликов, каждый из которых охватывает торец соответствующего ролика и связан со следящей пневмосистемой, а каждый из роликов соединен с горизонтальным рычагом посредством шарового щарнира, причем датчик положения края одной из деталей установлен на соответствующем держателе. 2.Механизм по п. 1, отличающийся тем, что он имеет горизонтальную разделительную пластину для деталей, расположенную между транспортирующими роликами и свободно установленную на платформе швейной мащины посредством щтифта. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 460338, кл. D 05 В 27/12, 1973.
t Ж ,
v 16 7
го
U
/ I
ИнОЬ
/
I 12
Фи2.1 20 // ;« в /« а 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения деталей на швейной машине | 1974 |
|
SU500301A1 |
| Устройство для автоматического поворота деталей относительно иглы швейной машины | 1977 |
|
SU672249A1 |
| Устройство для перемещения деталипО зАдАННОМу КОНТуРу HA шВЕйНОй MA-шиНЕ | 1975 |
|
SU796270A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ «ШПАС» | 1969 |
|
SU236971A1 |
| Устройство для управления швейной машиной | 1984 |
|
SU1201374A1 |
| Устройство для равнения кромок деталей, стачиваемых на швейной машине | 1985 |
|
SU1326680A1 |
| Устройство для перемещения стачиваемых деталей на швейной машине | 1981 |
|
SU1032061A1 |
| Полуавтомат для прошивки деталей и узлов швейных изделий | 1958 |
|
SU121331A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛЕДОВАТЕЛЬНОЙ ПОДАЧИ ДЕТАЛЕЙ ИЗДЕЛИЯ К ШВЕЙНЫМ МАШИНАМ | 1968 |
|
SU212048A1 |
| Устройство для выполнения краевых строчек на обувной швейной машине | 1983 |
|
SU1286654A1 |