I
Изобретение относится к автоматизации грузоподъемных машин и может быть использовано для защиты стрелы экскаватора-драглайна от опасной растяжки.
Известные способы защиты стрелы от опасной растяжки основаны на ступенчатом или плавном изменении скоростей приводов подъема и тяги, автоматическое управление которыми производится по каналам задания скоростей этих приводов. Причем автоматическое управление, корректирующее неправильные действия машиниста, вступает в действие, когда при достаточно малом расстоянии ковща от стрелы произойдет срабатывание защиты 1 и 2.
Однако при срабатывании защиты происходит снижение скорости и остановка как привода тяги, так и привода подъема, что в значительной мере снижает маневренность и производительность экскаватора.
Наиболее близким к предлагаемому изобретению по технической Сущности и достигаемому результату. является способ защиты стрелы экскаватора-драглайна, в котором при срабатывании защиты осуществляется предотвращение опасной растяжки путем управления по каналу задания скорости лищь одного привода тяги 3.
Известный способ защиты стрелы экскаватора-драглайна заключается в измерении координат ковща и формировании управляющего сигнала на привод тяги в зависимости от положения ковща.
Однако для реализации этого способа необходимо применять систему измерения координат ковща и их производных с достаточно высокой степенью точности, в противном случае уменьшаются надежность защити и маневренность экскаватора. Например, если в результате погрещности измерения защита срабатывает на дрстаточио близком расстоянии от стрелы, то не исключена возможность опасной растяжки и удара ковща по стреле. Если же защита сработает раньще, то ковщ останавливается на большем, чем допускается, удалении от стрелы, что обуславливает снижение маневренности
и производительности экскаватора.
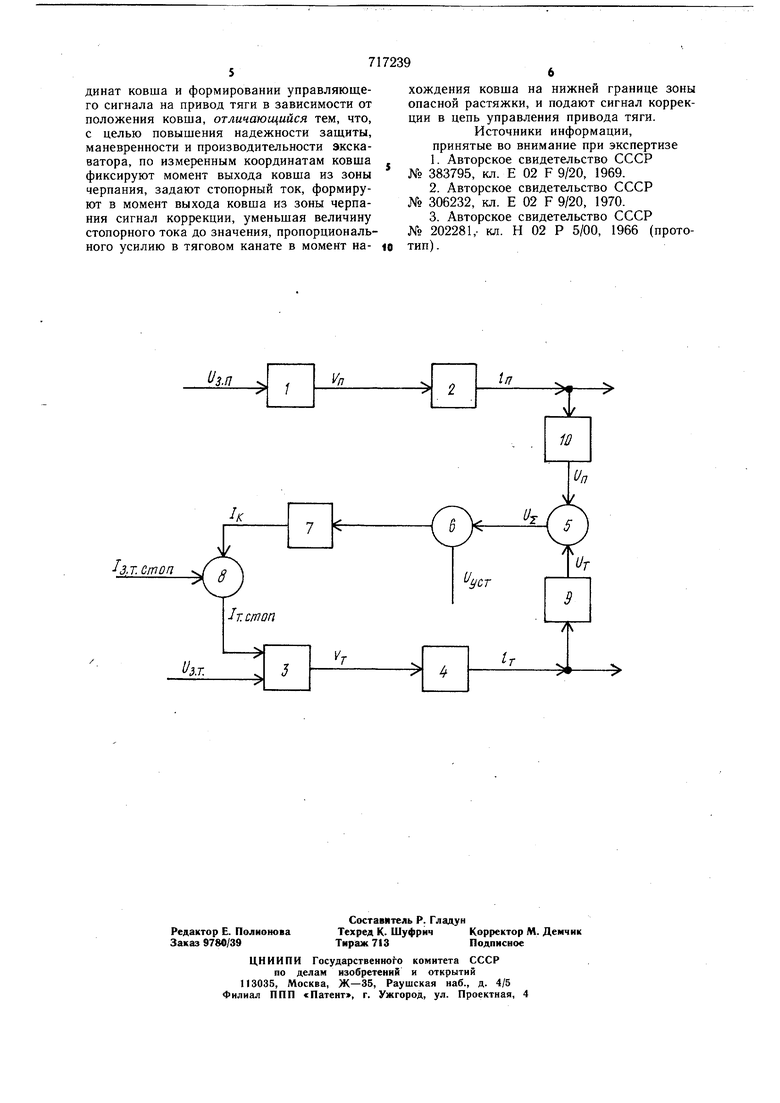
Целью изобретения является повышение надежности защиты, маневренности и производительности экскаватора. Это достигается тем, что по измеренным координатам ковша фиксируют момент выхода ковша из зоны черпания, задают стопорный ток, формируют в момент выхода ковша из зоны черпания сигнал коррекции, уменьшая величину стопорного тока до значения, пропорционального усилию в тяговом канате в момент нахождения ковша на нижней границе зоны опасной растяжки, и подают сигнал коррекции в цепь управления привода тяги. На чертеже дана структурная схема управления приводами тяги и подъема. На структурной схеме дан привод подъема 1, механизм подъема лебедки 2, привод тяги 3, механизм тяговой лебедки 4, сумматор, 5, блок сравнения 6, формирователь корректируюшего сигнала 7, выходной сумматор 8, блоки 9 и 10 измерения длин тягового и подъемного канатов соответственно, не находящихся на барабанах лебедок. Кроме того, приняты следующие условные обозначения: Ujn.- сигнал задания скорости привода подъема; Uar - сигнал задания скорости привода тяги, Vp - скорость подъема, V,. - скорость тяги; Ip - длина подъемного каната; IT - длина тягового каната; Up - сигнал на выходе схемы измерения длины подъемного каната, и т - сигнал на выходе блока измерения длины тягового каната; Uj - сигнал, пропорциональный сумме длин подъемного и тягового канатов, Uycr.- сигнал уставки, 1ц - корректирующий сигнал; 1а,т,стоп. задающий сигнал стопорного тока привода тяги; IT.стоп- стопорный ток привода тяги. Для выполнения предлагаемого способа измеряют длину подъемного и тягового канатов, определяют их сумму, сравнивают полученный при этом результат Uj; с сигналом уставки Uy, соответствующим сумме длин канатов при нахождении ковша в области между зоной копания и зоной опасной растяжки, и, формируя корректирующий сигнал после выхода ковша из зоны копания в область ниже зоны опасной растяжки, уменьшают стопорный ток привода тяги. Длину подъемного и тягового канатов в про.цессе работы экскаватора измеряют с помощью блоков измерения 9 н 10. Полученные в результате измерения сигнал UT, пропорциональный длине тягового каната 1 и сигнал UH, пропорциональный длине подъемного каната 1п, подают на вход сумматора 5. Сигнал и пропорциональный сумме длин подъемного и тягового канатов, с выхода сумматора 5 подают на вход блока сравнения 6 и сравнивают его с сигналом уставки UycT, соответствующим сумме длин канатов при нахождении ковша в области между границами зоны копания и зоны опасной растяжки. Сигнал с блока 6 подают на вход формирователя растяжки. Сигнал с блока б подают на вход формирователя корректирующего сигнала 7. Если сигнал Ug , пропорциональный сумме длин канатов, меньше сигнала установки, то с выхода формирователя 7 на выходной сумматор 8 подают корректирующий сигнал Iij. Этим уменьщают стопорный ток привода тяги до величины IT.стоп Ij.T.cron- U определяемой усилием в тяговом канате при Нахождении ковша на нижней границе зоны опасной растяжки. Если сигнал Us больЩеили равен сигналу уставки Uycy., то корректирующий сигнал на выходе формирователя 7 устанавливают равным нулю, этим обеспечивают величину стопорного тока, необходимую для копания. В случае, когда после уменьшения стопорного тока усилие в тяговом канате меньше стопорного усилия, то изменения скорости привода Vp, направленного на снижение скорости движения ковша к стреле, не происходит. При дальнейшем приближении ковша к стреле усилие в тяговом канате, увеличиваясь, достигает значения усилия отсечки, и скорость привода тяги с этого момента начинает изменяться так, что скорость движения ковша к стреле уменьшается вплоть до нуля. Если же после уменьшения стопорного тока оператором было произведено действие, исключающее растяжку, например скорости приводов были установлены такими что ковш не приближается к стреле, то усилие в тяговом канате остается неизмененным или же уменьшается, а привод тяги работает без изменения скорости, не препятствую машинисту вести работу. Так как непосредственно изменение скорости тяги, направленное на предотвращение опасной растяжки ковша, начинается лишь при возрастании усилия в тяговом канате до величины, равной усилию отсечки, то уменьшение стопорного тока можно произвести заблаговременно в области, расположенной между границами зоны опасной растяжки и зоны копания. Благодаря этому повышается надежность защиты и снижаются требования, предъявляемые к точности измерения координат Ц и 1о, которые при использовании предлагаемого способа сводятся к определению нахождения ковша между границей зоны растяжки и горизонталью, проходящей через пяту стрелы. Поскольку уменьщение стопорного усилия не проявляет себя в режимах, при которых не возникает опасной растяжки, маневренность экскаватора повышается. Повышение надежности защиты и маневренности позволяет снизить длительность вынужденных простоев экскаватора в сложных метеоусловиях и тем самым повысить его производител ьность. Формула изобретения Способ защиты стрелы экскаватора-драглайна, заключающийся в измерении координат ковша и формировании управляющего сигнала на привод тяги в зависимости от положения ковша, отличающийся тем, что, с целью повышения надежности защиты, маневренности и производительности экскаватора, по измеренным координатам ковша фиксируют момент выхода ковша из зоны черпания, задают стопорный ток, формируют в момент выхода ковша из зоны черпания сигнал коррекции, уменьшая величину стопорного тока до значения, пропорционального усилию в тяговом канате в момент нахождения ковша на нижней границе зоны опасной растяжки, и подают сигнал коррекции в цепь управления привода тяги.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 383795, кл. Е 02 F 9/20, 1969.
2.Авторское свидетельство СССР № 306232, кл. Е 02 F 9/20, 1970.
3.Авторское свидетельство СССР
№ 202281,. кл. Н 02 Р 5/00, 1966 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| СПОСОБ ВЗАИМОСВЯЗАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ПОДЪЕМА И ТЯГИ ДРАГЛАЙНА | 1967 |
|
SU202281A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
