(54) УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПЛОСКИХ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ СУШКИ И ОБЖИГА КИРПИЧА С ЕГО ТРАНСПОРТИРОВКОЙ В КАССЕТАХ, КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КИРПИЧА, АВТОМАТ-САДЧИК, АВТОМАТ-УКЛАДЧИК, СУШИЛО И НАКОПИТЕЛЬ КАССЕТ | 2006 |
|
RU2333831C2 |
| Устройство для сборки контактных групп | 1981 |
|
SU991629A1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Устройство для перегрузки плоских изделий | 1987 |
|
SU1537625A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН | 2005 |
|
RU2295172C2 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ОБРАБОТКИ ПЛАСТИН, НАПРИМЕР ФОТОШАБЛОНОВ | 2006 |
|
RU2328054C1 |
| Устройство для шаговых перемещений плоских изделий | 1980 |
|
SU939349A1 |
| Устройство для шагового перемещения | 1978 |
|
SU774732A1 |
| Полуавтомат герметизации полупроводниковых приборов контактной сваркой | 1988 |
|
SU1590290A2 |
| Устройство для выгрузки радиодеталей из групповых кассет с канавками | 1990 |
|
SU1781857A1 |
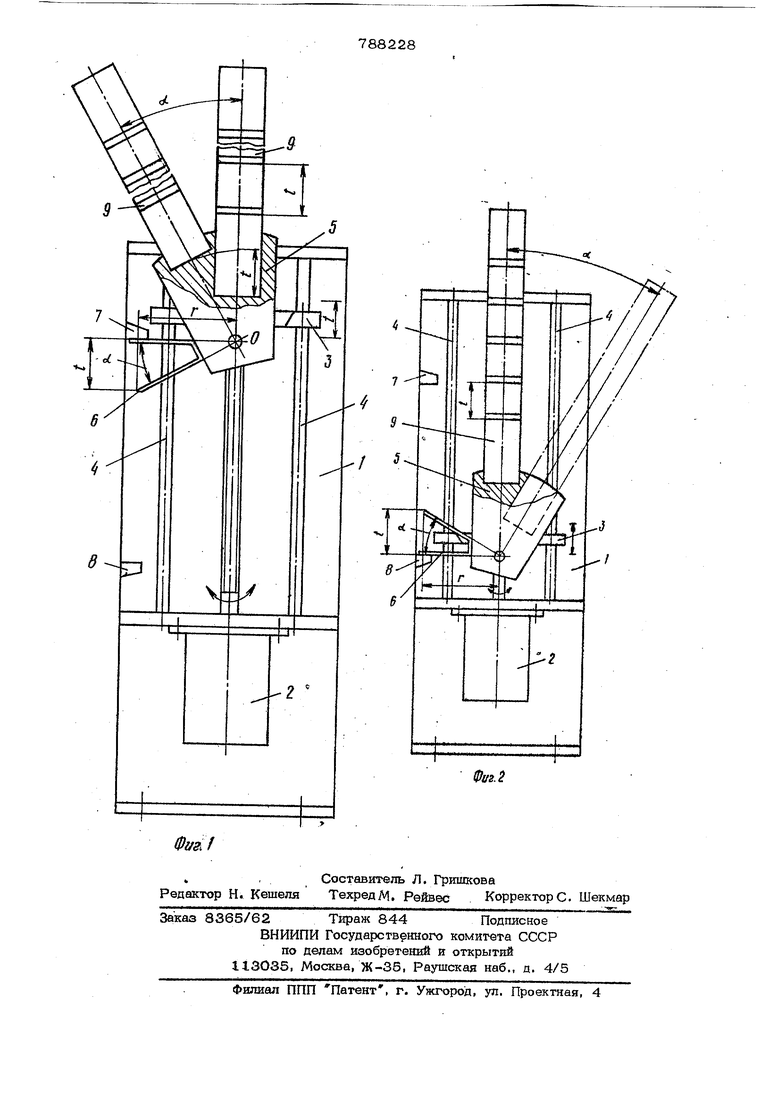
Изобретение относится к производств издрлий микроэлектроники, в частности к производству интегральных схем в плоских корпусах. Известно загрузочно-разгрузочное устройство для протяжного станка, мод. МА-1., содержащее два магазина (один для заготовок, другой - для обработанных деталей), механизм для поддержания постоянного уровня заготовок и деталей с приводом от гидроцилиндра и питатель с двумя захватами, один из которых по дает заготовку в рабочую зону, а другой удаляет обработанную деталь li}. Недостатком такого устройства является громоздкость, наличие холостого хода, необходимость в дополнительных механизмах для поворота магазинов. Известно устройство для загрузки плоских изделий, например кассет с мик росхемами, содержащее корпус, внутри , которого реизмещены механизм шагового перемещения, упоры, расположенные на внутренней стенке кожуха, и рычаг. установленный с возможностью взаимодействия с упорами 2. Недостатком устройства является низкая производительность. Цель изобретения - повышение производительности работы. Цель достигается тем, что устройство для загрузки плоских изделий,преимущественно кассет с плоскими интегральными схемами, содержащее корпус, внутри которого размещены механизм щагового 11еремещешш, упоры, расположенные на внутренней стенке корпуса, и рычаг, установленный с возможностью взаимодействия с упорами, снабжено размещенными внутри корпуса каретками, щарнирно закрепленными на нем держателем кассет и направляющими для каретки, причем рычаг установлен на держателе кассет, вьгаопненным в виде двух соединенных между собой ячеек, расположенных под углом (С друг к другу, определяемым соотноще .4i 378 где t - шаг перемещения держателя кассет на одну кассету; s - расстояние от центра шарнира держателя кассет до упора в горнзонташэНой плоскости. На фиг. 1 изображено устройство, общий вид (вид спереди, держатель в верхнем положении); на фиг. 2 - то же (вид спереди, держатель в нижнем положении) . Устройство для загрузки плоских изделий содержит icopnyc 1, механизм шагового перемещения 2, приводящего в движение каретку 3, которая перемещается по направляющим. 4. На каретке 3 щарШф но закреплен держатель кассет 5, снабжен ный рычагом 6, который взаимодействует с упорами 7,8, зшфепленными на внут-ренней стенке корпуса 1. Держатель кассет 5 выполнен в виде двух соединенных между собой ячеек, расположенных под углом друг к другу, в которых наклонно друг к другу расположены кассеты 9, причем глубина ячеек различна, а величина этой разности равна шагу вертикального смещения кассет. Установка кассет 9 со смешением по высоте друг относительно друга позволяет производить непрерыв ную выгрузку изделий из кассет без остановки работы устройства. При движении держателя 5 С1шзу вверх вьшрузка издели14 производится из верпшально установленной кассеты, которая расположена в ячейке держателя выше относительно смежной ей кассеты на величину шага вертикального перемешения кассет (их собственного шага). При достижении держателем 5 крайнего Bepxiiero положения после того, как с нижней полки вертикально установленной кассеты произой- дет выгрузка последнего изделия, осущест вляется очередное смещение держателя 5 на шаг i. и посредством взаимодействия рычага 6 с упором 7 произойдет поворот держателя 5 на угол d и смежная кассета из наклонного положения перейдет в вертшсальное, а так как она была установлена ниже на веЛич1гау шага перемещения кассет, еёнимошя полка совпадает с позгщией загрузки и изделие, не нарушив цикла работы исполнительного .устройства .гкг г.ч ...ъ . ТГ/ Я . попадает в рабочую зону, Вь грузка пустых кассет и установка заполненных изделиями производится в процессе работы устройства, когда кассета, подлежащая замене, находится в наклонном положении, например, при движении держателя сверху вниз кассета. 8 расположенная справа по чертежу (см. фиг. 2). Рычаг 6 выполнен в форме ласточкиного хвоста. Обозначив сС угол наклона кассет в держателе , t шаг перемещения кассет, f расстояние от центра шарнира держателя кассет до упора в горизонтальной плоскости, тогда t сС „ Оптимальный вариант угла наклона выбран ОПЫТНЬПУ путем и равен 25-30. Дискретное смешение кассет 9 на шаг -fc осушествляетбя при помощи механизма шагового перемещения 2. Кассеты 9 устанавл таются вручную опусканием в ячейки держателя s. после установки, например в верхнем крайнем положении (фиг.1),, кассеты 9 с изделиями в вертикальную ячейку держателя g устройство включается в работу. Управляющий блок (не показан) вырабаты ает сигналы для периодического включения держателя 5, который осуществляет смещение на величину одного шага i; . go рремя выгрузки изделий из вертикально установленной кассеты можно установить в ншслонную ячей1су держателя 5 другую кассету с изделиями. В конце хода каретки 3 в одном направлении имеется упор (вверху - 7, внизу - 8). Выдав из вертикальной кассеты все изделия, устройство при очередном смещении на шаг Ь посредством взаимодействия упора 8 с рычагом поворота 6 переводит кассету с изделиями из наклонного в вертикальное положение, и к выгрузке готова уже другая кассета. УправляюЩ1Й блок обеспечивает далее реверсивное движение механизма шагового перемещения, и выгрузка изделий ос тществляется при дискретном движении кассеты снизу вверхг Отклоненная в сторону незагруженная кассета может быть заменена а заполненную во время работы ,устройства. Когда кассета 9 дойдет до верхдцго крайнего положения от упора.7, пЬсредством рычага 6 произойдет новое перемещение кассет и цшсл работы повторится. Замена кассет производится без останов1шработы устройства. Циклические перемещ.егшя не измен5потся по величине и всегда равны заданному значению. Окончание рабочего цшсла настраивается по упорам. Предлагаемое устройство является полезным для создания высоко.производительньтх автоматов. Ожидаемый экономичестшй эффект состоит в том, что замена одной кассеты яри остановке машины занимает не менее 10 с; возвратное холостое перемдщение по времени при больших производителькостях почти равно времени рабочего перемещения устройства с выдачей изделий (особенно в устройствах с винтовым перемещением и с асинхронным прямым электроприводом с неизменной скоростью рабочего и холостого хода); конструкция проста, т.е. для перемещения кассет не требуется никаких дополнительных сложн :устройств и приспособлений, а используется лишь рычаг и два упора; при циклах работы оборудования околц I с повышение производительности составит не менее 2О%, что позволит уменьшить количество потребного оборудования и рабочей силы. Формула изобретения Устройство для загрузки плоских изделий, преимущественно кассет с интегральными схемами, содержащее корпус, внутри которого «размещены механизм шагового перемещения, упоры, расположенные на внутренней стенке корпуса, и рычаг, установленный с возможностью взаимодействия с упорами, о т- личаюшееся тем, что, с целью повышения производительности работы, оно снабжено размещенными внутри корпуса каретками, шарнирно закрепленными на нем держателе кассет и направляющими для каретки, причем рычаг установлен на держателе кассет, выполненным в виде двух соединенных между собой ячеек, расположенных под угломсС друг к другу, определяемым соотношениемгде -fr - шаг перемещения держателя кассет ка одну кассету; V - расстояние от центра шарнира держателя кассет до утюрй в горизонтальной плоскости. Источнтш информации, принятые во внимание при экспертизе 1.Малов А. Н. Загрузочные устройства для металлорежущих станков. М.. Машиностроение , 1965, с. 232-234, фиг. 134. 2.Авторское свидетельство СССР № 391763,. кл. Н 05 К 13/О2. 1971 (прототип).
