(5) УСТРОЙСТВО для ШАГОВЫХ ПЕРЕМЕЩЕНИЙ ПЛОСКИХ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговых перемещений | 1979 |
|
SU825404A1 |
| Устройство для шаговых линейных перемещений | 1978 |
|
SU753729A1 |
| Устройство для шаговых линейных перемещений | 1981 |
|
SU988688A1 |
| Устройство для шаговых линейныхпЕРЕМЕщЕНий | 1979 |
|
SU846435A1 |
| Устройство для загрузки плоских изделий | 1978 |
|
SU788228A1 |
| Устройство для подрезки выводов микросхем | 1985 |
|
SU1307616A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ШЛИФОВАНИЯ ВИНТОВЫХ КАНАВОК РЕЖУЩЕГО ИНСТРУМЕНТА | 1990 |
|
RU2031771C1 |
| Устройство для определения механических свойств грунтов | 1988 |
|
SU1599704A1 |
| Устройство для шаговой подачи изделий | 1978 |
|
SU722817A1 |
| Поточная линия ультразвукового контроля изделий с цилиндрическими поверхностями и автомат сканирования ультразвуковым преобразователем | 1985 |
|
SU1363056A1 |
1
Изобретение относится к устройствам управления шаговыми перемещения ми пхгаских изделий, в частности в полупроводниковой про ш1ленности при проведении заключительных операций производства интегральных схем (а автоматах вырубки, укладки, маркировки, сортировки).
Известно устройство для шаговых перемещений, содержащее раму, направляющие, KapeTKji ходовой винт, привод. На каретке закреплена линейказадатчик шага, а на раме установлен бесконтактный злектримеский датчик 1.
Недостатком такого устройства являются низкая производительность из-за больших потерь бремени на холостой ход, а также значительные динамические нагрузки, возникающие при циклическом включении привода.
Известно также устройство для шаговых перемещений плоских изделий, содержащее держатель кассет, ходовой
винт, электропривод, датчик позиционирования, линейку-задатчик шага и блок управления t2.
Основным недостатком известного устройства является низкая производительность из-за наличия холостого хода и, соответственно, из-за потерь времени на его осуществление.
Цель изобретения - повышение производительности за счет исключения
10 времени холостого хода.
Поставленная цель достигается тем, что устройство снабжено коммутирующим блоком, один вход которого соединен с датчиком позиционирования, два других с выходами блока управления, а выходы коммутирующего блока соединены с блоком управления.
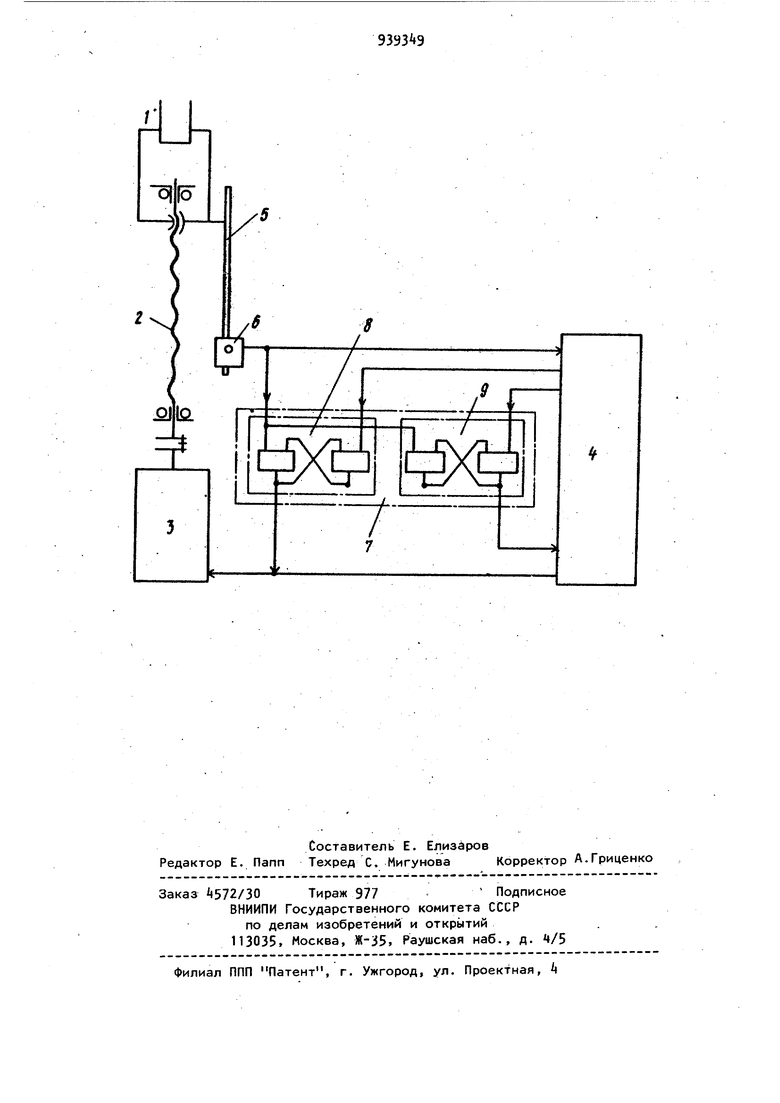
На чертеже представлена принципиальная схема устройства.
20
Устройство состоит из следующих основных элементов: держателя 1 кассет, ходового винта 2, электропривода 3. блока f управления. На держа393теле 1 жестко закреплена линейказадатчик 5 шага со щелевидными отверстиями, а считывание шага осущест вляется при помощи бесконтактного электрического датчика 6 позициониро вания, в цепь управления приводом включен коммутирующий блок 7 выполненный на триггерах 8 и 9 с двумя устойчивыми состояниями. Роль тригге ров b и 9 с двумя устойчивыми состоя ниями могут выполнять, например,три1- геры. Работа устройства происходит следующим образом. Блок 4 управления включает электропривод 3, ходовой винт 2 поворачивается и перемещает держатель 1. В момент совмещения отверстия линейкизадатчика 5 с датчика 6 позиционирования последний подает сигнал на остановку привода 3- После определенной паузы вновь включается привод 3 и держатель 1 совершает очередной шаг. При достижении держателем 1 крайнего нижнего положения с датчика 6 позиционирования поступает сигнал на коммутацию обратного хода дви гателя 3 в блок 4 управления и одновременно нЪ вход коммутирующего блока 7. Триггеры 8 и 9 коммутирующего блока 7 под действием сигнала датчика нижнего положения устанавливаются так, чтобы триггер 8 коммутирующего блока 7 останавливал электропривод 3 в нижнем положении, а сигнал с триггера 9 подается в блок Ч упр авления для коммутации обратного хода и сигнализации о необходимости замены кассеты (не показана). После определенной паузы, в теменйе которой производится замена кассеты с изделиями (не показаны) в дер жателе 1, поступает сигнал из блока k управления и триггер 8 коммутирующего блока 7 перебрасывается в сос тояние,при котором запускается электропри&од 3, перемещая держатель 1 вверх. В момент совмещения отверстия линейки-задатчика 5 с датчиком 6 позиционирования он подает сигнал, который, поступая на вход коммутирующего блока 7 перебрасывает триггер В в состояние, при котором происходит остановка электропривода 3.После определенной паузы, в течение которо происходит выгрузка изделий из кассе ТЫ, из блока управления поступает сигнал, который дает разрешение на включение электропривода 3 коммутирующим блоком 7. Таким образом, происходит шаговое перемещение держателя 1 (с кассетой) до верхнего исходного положения. В верхнем положении датчик 5 сбрасывает триггеры 8 и 9 коммутирующего блока 7 в исходное положение, при котором триггер 8 не препятствует прохождению с блока 4 управления сигнала, дающего команду электроприводу з, на осуществление шагового перемещения держателя 1 вниз, а триггер 9 разрешает прохождение сигнала с блока t управления на реверс электропривода 3 для перемещения держателя 1 вниз. После определенной паузы, в течение которой производится смена кассетыj держатель начинает шаговое движение вниз. Цикл работы устройства повторяется, и управление движением электропривода осуществляется только от блока k управления. Использование устройства позволяет повысить производительность оборудования (почти в 2 раза), а также уменьшить число единиц оборудования примерно на tO, что позволяет уменьшить затраты на оборудование (изготовление, обслуживание, ремонт). Формула изобретения Устройство для шаговых перемещеНИИ плоских изделий, содержащее держатель кассет, ходовой винт, электропривод, датчик позиционирования, линейку-задатчик шага и блок управления, отличающееся тем, что, с целью повышения производительности за счет исключения времени холостого хода, оно снабжено коммутирующим блоком, один вход которого соединен с датчиком позиционирования, два других с выходами блока управления, а выходы коммутирующего блока соединены с блоком управления. Источники информации, принятые во внимание при экспертизе Т. Авторское свидетельство UCCP № 6П824, кл. В б5 G 25/00, 1977. Z. Авторское свидетельство СССР № ,кл. В 65 , 1979 (прототип) .
I
-f
ЙХа
