(54) АВТОМАТИЧЕСКОЕ УСТРОЙСТВО КОРПУСОВ СУДОВ ДЛЯ ОБРАБОТКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое устройство для обработки корпусов судна | 1978 |
|
SU738940A1 |
| Манипулятор для очистки и окраски корпусов судов | 1978 |
|
SU789320A1 |
| Устройство для обработки корпуса судна в доке | 1982 |
|
SU1039803A1 |
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1105387A1 |
| Манипулятор для обработки корпусных конструкций судов | 1979 |
|
SU789323A1 |
| Устройство для обработки поверхности судов | 1977 |
|
SU897634A1 |
| УСТРОЙСТВО ДЛЯ НАРУЖНОЙ ПОВЕРХНОСТНОЙ ОБРАБОТКИ КОРПУСА СУДНА | 1992 |
|
RU2088471C1 |
| Устройство для автоматической очистки и окраски судового корпуса | 1977 |
|
SU770923A1 |
| Устройство для обработки поверхности корпуса судна в доке | 1978 |
|
SU789319A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
1
Изобретение относится к судостроению, в частности, к автоматическим устройствам для обработки корпусов судов.
Известно автоматическое устройство для обработки корпусов судов, содержащее подвижную тележку с установленной на ней g мачтой с подъемной площадкой, которая имеет сервопривод перемещения и . шарнирно сочленена со стрелой, несущей держатель рабочих приспособлений с датчиками расстояний до обрабатываемой поверхности, выходы, которых соединены с механизмом на- О клона стрелы и сервоприводом перемещения рабочей площадки, а датчик перемещения рабочей площадки и датчик наклона стрелы соединены со входом вычислительного устройства, при этом механизм наклона стрелы щэрнирно связан с подъемной площадкой и стрелой, а сервопривод перемещения подъемной площадки установлен на тележке 1.
Однако устройство не обеспечивает высокой производительности и качества .об- 20 работки больщих вертикальных, наклонных и криволинейных частей корпусов судна, что ухудшает эксплуатационные свойства известного устройства.
Цель изобретения - улучщение эксплуатационных характеристик автоматического устройства.
Поставленная цель достигается тем, что устройство снабжено нуль-органами и релейным устройством останова, причем выход вычислительного устройства соединен со входами нуль-оганов, выходы которых связаны со входами релейного устройства останова, а выход последнего соединен с сервоприводом перемещения площадки, при этом мачта выполнена телескопической.
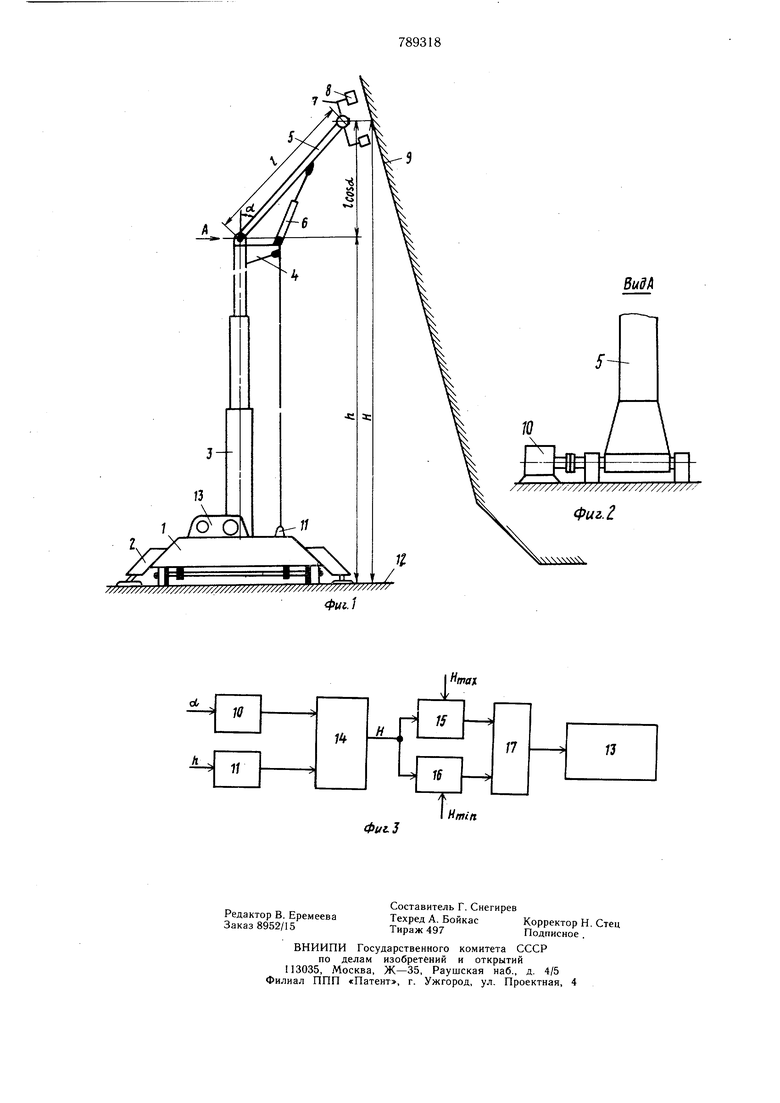
На фиг. 1 изображено устройство в рабочем положении у борта судна; на фиг. 2- конструкция узла с датчиком угла наклона стрелы; на фиг. 3 - блок-схема системы управления устройством.
Устройство содержит подвижную тележку 1 с выдвижными упорами 2, с установленной на ней телескопической мачтой 3 с подъемной площадкой 4, которая щарнирно сочленена со стрелой 5 и с механизмом 6 наклона стрелы. На свободном конце стрелы 5 укреплен держатель7 рабочих приспособлений с датчиками 8 расстояния до обрабатываемой поверхности корпуса судна 9, с осью наклона стрелы 5 связан датчик 10, выдающий значение косинуса угла наклона стрелы, а с подъемной площадкой 4 взаимодействует датчик 11 перемещения рабочей площадки 4 выдвижения телескопа мачты относительно палубы 12 дока. Телескопическая мачта 3 складывается и выдвигается с помощью сервопривода 13. Причем датчик 10 наклона стрелы 5 и датчик перемещения рабочей площадки соединены со входом вычислительного устройства 14.
Устройство снабжено нуль-органами 15, 16 и релейным устройством 17 останова, причем выход вычислительного устройства соединен со входами нуль-оганов 15, 16, выходы которых связаны со входами релейного устройства останова, а выход последнего соединен с сервоприводом 13 перемещения рабочей площадки 4.
Устройство работает следующим образом.
Из исходного положения у борта телескопическая мачта 3 начинает складываться. При этом стрела 5 с помощью механизма 6 наклона стрелы по сигналу от датчиков 3 наклоняется .в сторону криволинейной поверхности борта 9, отслеживая ее. Высота держателя 7 рабочих приспособлений определяется как
H h-ffcosdt,(1)
где Н -высота рабочих приспособлений
над палубой дока;
К -высота подъемной площадки над палубой дока (высота выдвижения телескопа мачты); t -длина стрелы; гХ - угол наклона стрелы. Выходы датчиков 11 телескопа мачты 3 и датчика угла наклона 10 стрелы 5 поступают на вход вычислительного устройства 14 на выходе которого формируется напряжение в соответствии с соотношением (1), т. е. напряжение, пропорциональное действительной высоте Н держателя 7 рабочих приспособлений над уровнем палубы 12.,поступающее на первые входы нуль-органов 15, 16, на вторые входы которых поступают напряжения, пропорциональные, соответственно, максимальной и минимальной Н высоте с задатчиков высоты. При раили Н Hnti-n. сравенстве Н Н
ntax.
батывает релейная система 17 останова, которая отключает сервопривод 13 подъема (выдвижения) телескопа мачты, а также в случае необходимости может управлять другим механизмом устройства, обеспечивая работу по заданной программе.
В качестве датчика выдвижения телескопа мачты применяется, например многооборотный подпружиненный потенциометр, который тросиком соединен с подъемной площадкой. Напряжение, снимаемое с движка
потенциометра, пропорционально действительной высоте h подъемной площадки над палубой дока. Для замера h также применяется цифроаналоговый датчик, построенный на основе пары бесконтактных конечных выключателей, установленных на площадке 4, и металлической рейки с выступами по обе стороны.
Задатчиками максимальной и минимальной высоты рабочих приспособлений над палубой служат, например потенциометры,
питаемые от стабилизированных источников напряжения.
Устройство обеспечивает обработку корпуса судна возвратно-поступательными движениями рабочих приспособлений цо вертикали с точным остановом рабочих органов на заданной высоте, а также высокую производительность и качество обработки больщих вертикальных, наклонных и криволинейных поверхностей судов (особенно в кормовой и носовой их оконечностях), что
позволяет получить экономический эффект и улучшить санитарно-гигиенические условия труда.
Формула изобретения
Автоматическое устройство для обработки корпусов судов, содержащее подвижную тележку с установленной на ней мачтой и с подъемной площадкой, которая имеет сервопривод перемещения и щарнирно сочленена со стрелой, несущей держатель рабочих приспособлений с датчиками расстояний до обрабатываемой поверхности, выходы которых соединены с механизмом наклона стрелы и сервоприводом перемещения рабочей площадки, а датчик наклона стрелы и датчик перемещения рабочей площадки соединены со входом вычислительного устройства, при этом механизм наклона стрелы щарнирно связан с подъемной площадкой и стрелой, а сервопривод перемещения подъемной площадки установлен на тележке, отличающееся тем, что, с целью улучшения эксплуатационных характеристик автоматического устройства, оно снабжено нуль-органами и релейным устройством останова, причем выход вычислительного устройства соединен со входами нуль-органов, выходы которых связаны со входами релейного устройства останова, а выход последнего соединен с сервоприводом перемещения рабочей площадки, при этом мачта выполнена телескопической.
Источники информации,
принятые во внимание при экспертизе
заявке № 2572053/11, кл. В 63 В 59/00, 1978.
w////////////////////////////////////////.
V
