(54) МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ И ОКРАСКИ КОРПУСОВ СУДОВ


| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для обработки корпусных конструкций судов | 1979 |
|
SU789323A1 |
| Автоматическое устройство для обработки корпусов судов | 1978 |
|
SU789318A1 |
| Устройство для автоматической очистки и окраски судового корпуса | 1977 |
|
SU770923A1 |
| Автоматическое устройство для обработки корпусов судна | 1978 |
|
SU738940A1 |
| Манипулятор для очистки днищевой части корпуса судна | 1990 |
|
SU1743987A1 |
| Устройство для обработки корпуса судна в доке | 1982 |
|
SU1039803A1 |
| Устройство для обработки поверхности судов | 1977 |
|
SU897634A1 |
| Устройство для очистки и окраски корпусов судов | 1978 |
|
SU713762A1 |
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1105387A1 |
| Устройство для очистки корпуса судна | 1983 |
|
SU1134473A1 |
1
Изобретение относится к доково.му оборудованию, в частности к манипулятора.м для очистки и окраски корпусов судов.
Известен манипулятор для очистки и окраски корпусов судов, содержащий самоходную тележку, на которой установлена телескопическая мачта с подъемной площадкой, и стрелу, на которой с помощью шарнирного узла смонтирован держатель рабочих приспособлений, при этом стрела щарнирно соединена с мачтой и имеет сервомеханизм наклона, связанный с датчиками зазора, укрепленными на держателе 1.
Однако дэнная конструкция не позволяет обрабатывать днища судов, что снижает эксплуатационные характеристики.
Цель изобретения - улучшение эксплуатационных характеристик.
Поставленная цель достигается тем, что шарнирный узел держателя поворотно смонтирован относительно оси стрелы и имеет механизм поворота, а самоходная тележка имеет дополнительный сервомеханизм, связанный с датчиками зазора и взаимодействующий с мачтой, причем последняя соединена с самоходной тележкой щарнирно.
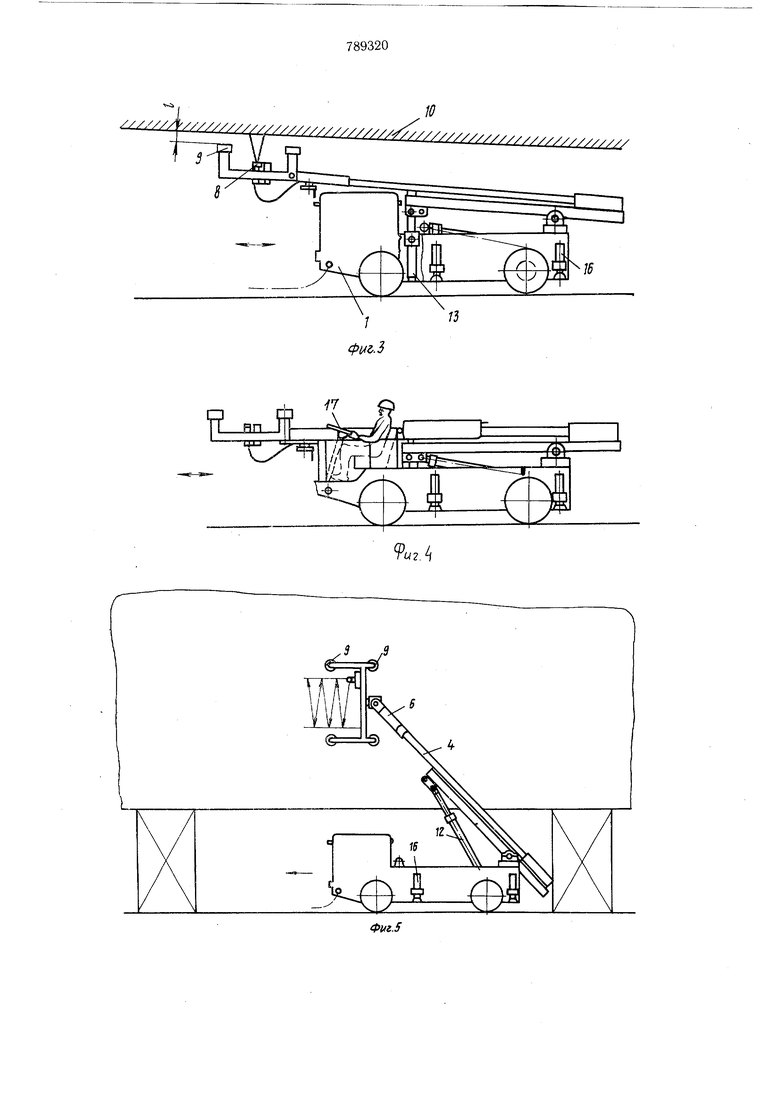
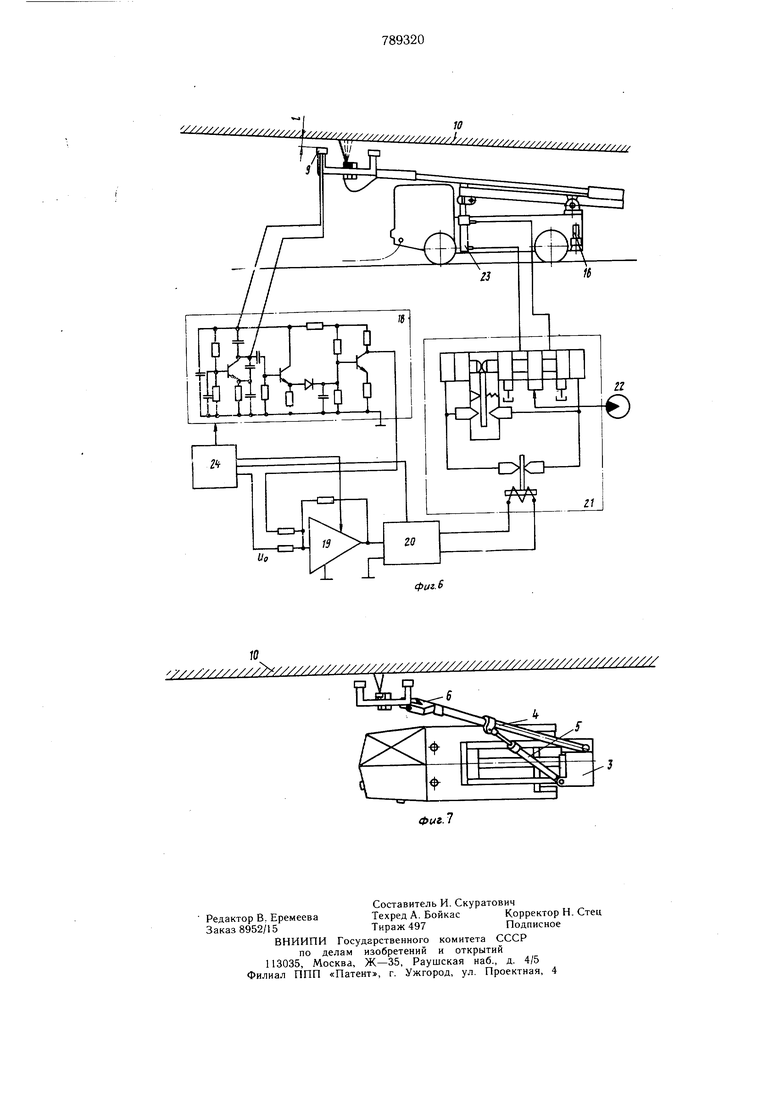
На фиг. 1 представлен манипулятор при вертикальном расположении телескопической мачты у борта судна; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - принципиальное расположение механизмов манипулятора при 5 обработке днищевых поверхностей; на фиг. 4 - транспортное положение .манипулятора; на фиг. 5 - положение механиз%5ОЕ при обработке низко расположенных скуловых поверхностей корпуса; на фиг. 6 - блок-схема сервомеханизма.
10Манипулятор состоит из самоходной тележки 1, на которой шарнирно закреплена телескопическая мачта 2 с подъемной площадкой 3, на которой щарнирно закреплена стрела 4 с сервомеханизмом наклона 5.
На конце стрелы 4 с помощью шарнир15ного узла 6 укреплен держатель 7 рабочих приспособлений 8 с датчиками 9 зазора между приспособлениями 8 и корпусом 10 судна. В качестве рабочих приспособлений могут быть применены пистолеты для окраски распылением и гидродинамической очистки.
Узел 6 с помощью механизма поворота, состоящего из червячной пары с маховиком 11, может поворачиваться вокруг оси стрелы 4. Телескопическая мачта может наклоняться до горизонтального положения вдоль корпуса тележки Г с помощью механизма наклона 12. На тележке 1 закреплен дополнительный сервомеханизм 13, шарнирно сочленяемый с мачтой 2 при горизонтальном положении последней, и связанный с датчиками 9 зазора. Узел 6 имеет две степени свободы, реализуемых, например, с помощью механизма наклона 12 с приводной цепью (разворот держателя 7 вокруг горизонтальной оси) и квадрантового гидромотора 15 (разворот держателя 7 вокруг вертикальной оси). Тележка 1 имеет выдвижные упоры 16 и рулевое управление 17. Датчик 9 зазора (например индуктор) подключен к электронной схеме 18, выход которой соединен с операционным усилителем 19, а выход последнего подключен ко входу усилителя мощности 20, выход которого связан со входом электрогидравлического преобразователя 21, к которому подведено давление от насоса 22. Выход преобразователя 21 соединен с гидроцилиндром 23 сервомеханизма 13. На второй вход усилителя 19 поступает напряжение уставки Vo от источника питания 24. Манипулятор работает следующим образом. При обработке корпуса судна (очистка или окраска вертикальными полосами) тележка 1 устанавливается вдоль корпуса судна 10, приводятся в действие упоры 16, держатель 7 маховиком 11 приводится в положение, при котором приспособления 8 и датчики 9 обращены к обрабатываемой поверхности корпуса 10. Телескоп мачты 2 с площадкой 3 соверщает возвратно-поступательные движения по вертикали, при этом сервомеханизм наклона 5 стрелы 4, взаимодействуя с датчиками 9 зазора, обеспечивает постоянство зазора 1 между приспособлениями 8 и корпусом 10 а гидроцилиндр 14 и гидромотор 15 обеспечивают по сигналам от датчиков 9 расположение приспособлений 8 по нормали к поверхности корпуса 10. После проведения очередной полосы тележка перемещается на шаг обработки вдоль корпуса 10 судна и производится, реверс движения телескопа мачты 2. Для обработки днищевых поверхностей корпуса 10 телескоп мачты 2 складывается, маховиком 11 шарнирный узел 6 разворачивается на 90° по часовой стрелке, относительно положения при обработке борта. Затем мачта наклоняется, например, с помощью ходового винта с механизмом наклона 12, до горизонтального положения, отсоединяется ходовой винт и мачта сочленяется с сервомеханизмом 13, который взаимодействуя с датчиками 9, обеспечивает постоянство зазора в процессе передвижения тележки 1 под днищем судна. 0 При изменении зазора 1 между датчиком 9 и корпусом 10 на выходе схемы 18 изменяется напряжение, сравниваемое на входе усилителя 19 с напряжением VQ. Приравенстве зазора 1 заданному, сигнал на выходе усилителя 19 равен нулю. При отклонении значения зазора 1 от заданной величины сигнал рассогласования на выходе 19 усиливается усилителем мощности 20 и управляет заслонкой преобразователя 21, который подает давление от насоса в соответствующую полость гидроцилиндра 23, который наклоняет мачту в сторону уменьшения рассогласования. Схема 18 работает как генератор, индуктивностью которого управляет индуктор датчика 9. Приближение или удаление датчика 9 от корпуса 10 вызывает изменение индуктивности датчика, что в свою очередь вызывает изменение частоты или амплитуды колебаний на выходе генератора, которые детектируются и усиливаются, в результате чего, на выходе схемы 18 появляется напряжение, пропорциональное зазору 1. В транспортном положении мачта 2 устанавливается горизонтально. При обработке бортовой поверхности корпуса судна и низко расположенных скуловых поверхностей мачта 2 фиксируется в наклонном состоянии, держатель с помощью гидроцилиндра 14 и гидромотора 15 шарнирного узла 6 и маховика 11 приводится в положение, при котором при движении тележки 1 вдоль корпуса 10 приспособления 8 ориентируются по нормали к поверхности корпуса 10, все механизмы шарнирного узла фиксируются в выбранном положении и сигналы датчиков 9 воздействуют на сервомеханизмы рулевого управления 17, которые обеспечивают неизменность зазора в процессе обработки скулы. Наличие наклоняемой телескопической мачты и поворачиваемого вокруг оси стрелы шарнирного узла, а также сервомеханизма наклона мачты, сочленяемого с нею в горизонтальном положении последней, и взаимодействующего с датчиками зазора, позволяет манипулятору обрабатывать практически все криволинейные поверхности судовых корпусов, включая борт, скулу, днище, подзоры. При обработке корпуса (борта, скулы) продольными полосами создаются условия для автоматизированной обработки судов при их тесной многорядной постановке в доках, поскольку манипулятор занимает минимум места у борта. Использование манипулятора создает необходимые условия для обеспечения высокого качества и производительности обработки корпусов судов, универсальности и высокой степени автоматизации малярных работ в доке и на степеле, позволяет улучшить санитарно-гигиенические условия труда маляров.
Формула изобретения
Манипулятор для очистки и окраски корпусов судов, содержащий самоходную тележ ку, на которой установлена телёског.ическая мачта с подъемной площадкой, и стрелу, на которой с помощью шарнирного узла смонтирован держатель рабочих приспособлений, при этом стрела шарнирно соединена с мачтой и имеет сервомеханизм наклона, связанный с датчиками зазора, укрепленными на держателе, отличающийся тем, что, с целью улучшения эксплуатационных
Фиг.1
характеристик, шарнирный узел держателя поворотно смонтирован относительно оси стрелы и имеет механизм поворота, а самоходная тележка имеет дополнительный сервомеханизм, связанный с датчиками зазора и взаимодействующий с мачтой, причем последняя соединена с самоходной тележкой щарнирно.
.Источники информации, принятые во внимание при экспертизе 1. Патент ПНР № 76907, кл. 65 d 59/00, 1975.
Su8 А
Фиг. 2
Ua
. y//////////// //////////////////////////////////////////////////////////
W
