Изобретение относится к промышленному транспорту и может быть использовано во всех отраслях народного хозяйства для автоматизации погрузочно-разгрузочных операций при транспортировании тарных грузов подвесными конвейерными системами различных типов.
Известно устройство для съема и передачи грузов с подвесного конвейера на рабочее место и обратно, содержащее продольные направляющие, в которых установлена тележка с подъемно-поворотным механизмом, имеющим захват и синхронизирующее приспособление 1.
Недостатками устройства являются сложность конструкции - наличие отдельных приводных механизмов для перемещения исполнительных органов, недостаточная надежность устройств из-за конструктивной сложности или отсутствия, например, приспособления фиксации подвески, а также сложность управления устройством.
Известно также устройство для погрузки и разгрузки тары, включающее установленную в продольных направляющих тележку с подъемно-поворотным .механизмом, имеющим захват, синхронизирующее фиксирую1цее приспособления 2.
Недостатком известного устройства является сложность конструкции, заключающаяся в том, что движения механизмов выполняются отдельными приводами. Так перемещение тележки в исходное положение осуществляется двумя гидро.мотора.ми, подъемно-поворотный .механизм имеет лебедку с гидро.моторо.м для вертикального перемещения и гидроцилиндров для поворота, выдвижение захватов осуществляется гидроцилиндром и сам захват в вертикальной плоскости перемещается гидроцилиндром.
Такое рещение устройства усложняет его конструкцию и управление им, что в конечном счете снижает его надежность.
Целью изобретения является упрощение конструкции и повыщение. надежности.
Цель достигается те.м, что в устройстве для погрузки и разгрузки тары, включающем установленную в продольных направляющих тележку с подъемно-поворотны.м механизмом, имеющим захват, синхронизирующее и фиксирующее приспособления, синхронизирующее приспособление выполнено в виде цепного контура отбора мощности со сцепными каретками, связанного с ним цепного контура синхронизации движения подъемно-поворотного механизма с поводко.м, установленны.м с возможностью взаимодействия С( тележкой, и включающего .механиз.ма с кулачком и рычажной системой принудительного возврата в исходное положение, а фиксирующее приспособление выполнено в виде поворотных корпусов с пространственны.ми пазами и рычагами и щарнирно с.монтированнсж на поводке планки с роликами, установленными на ней с возможностью размещения в пространственных пазах поворотных корпусов.
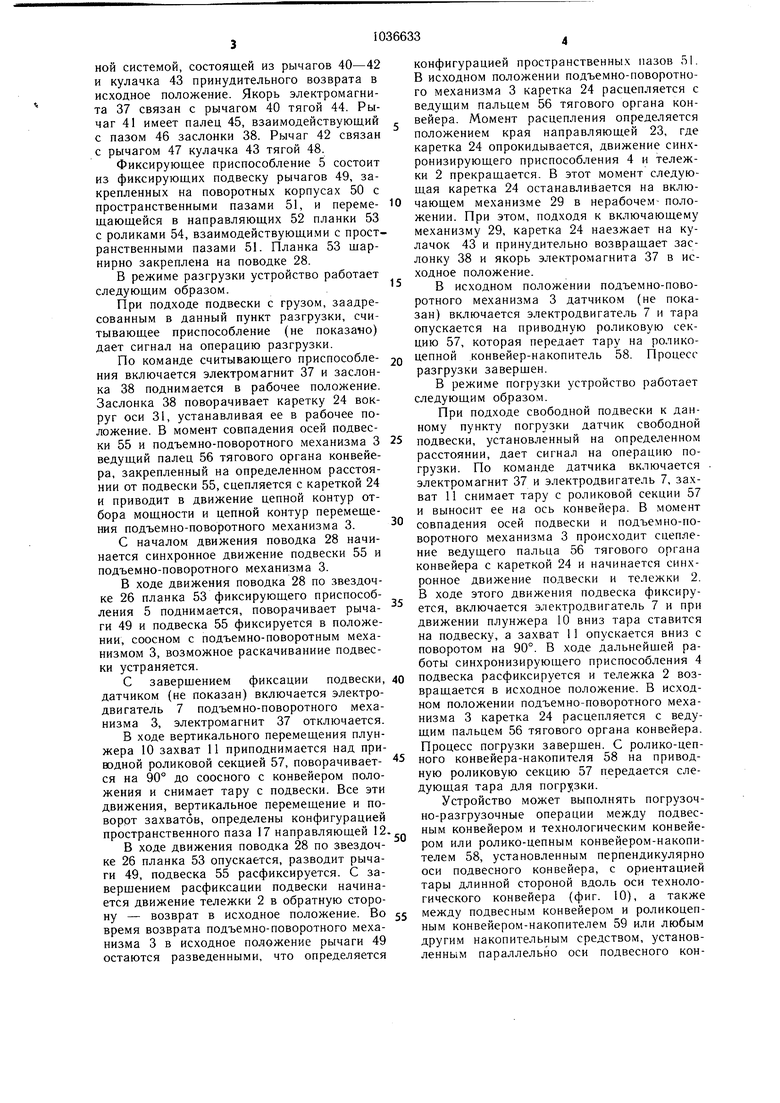
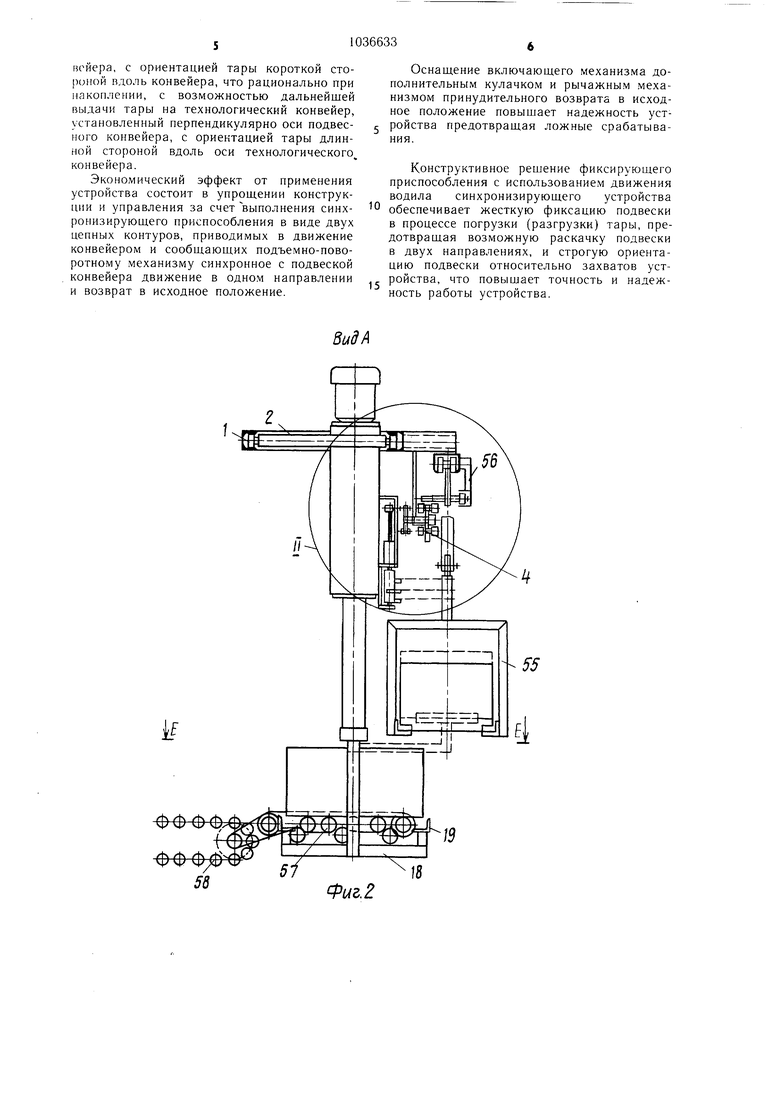
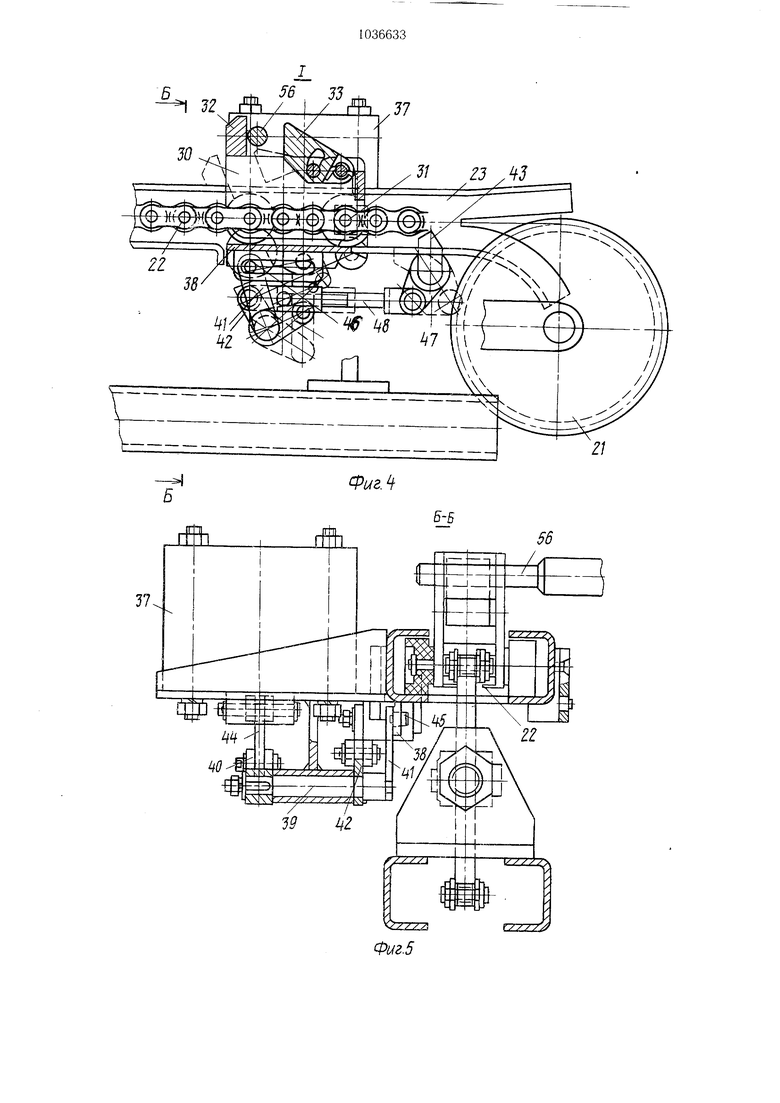
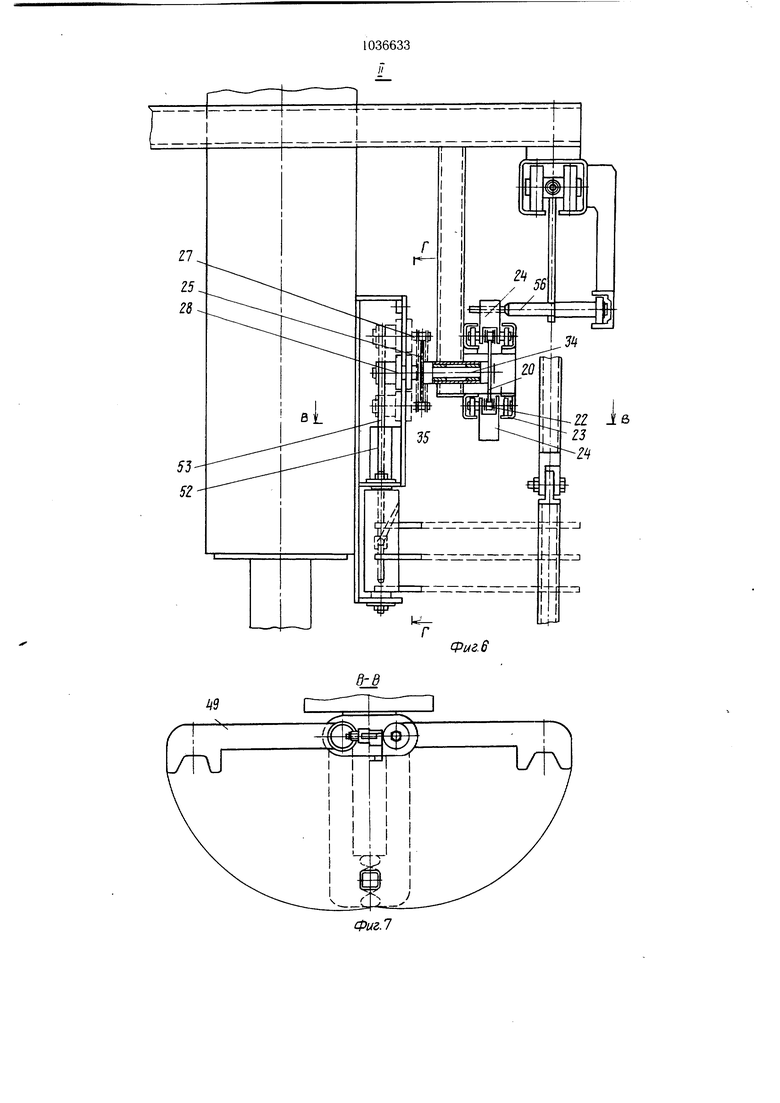
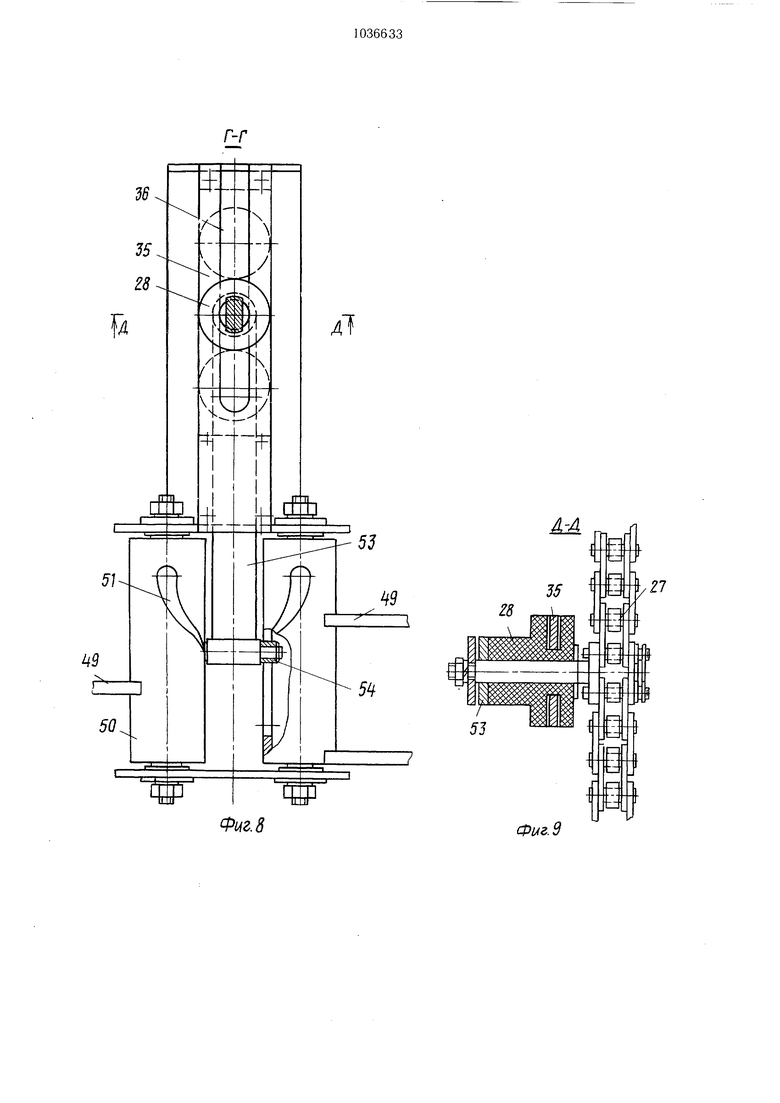
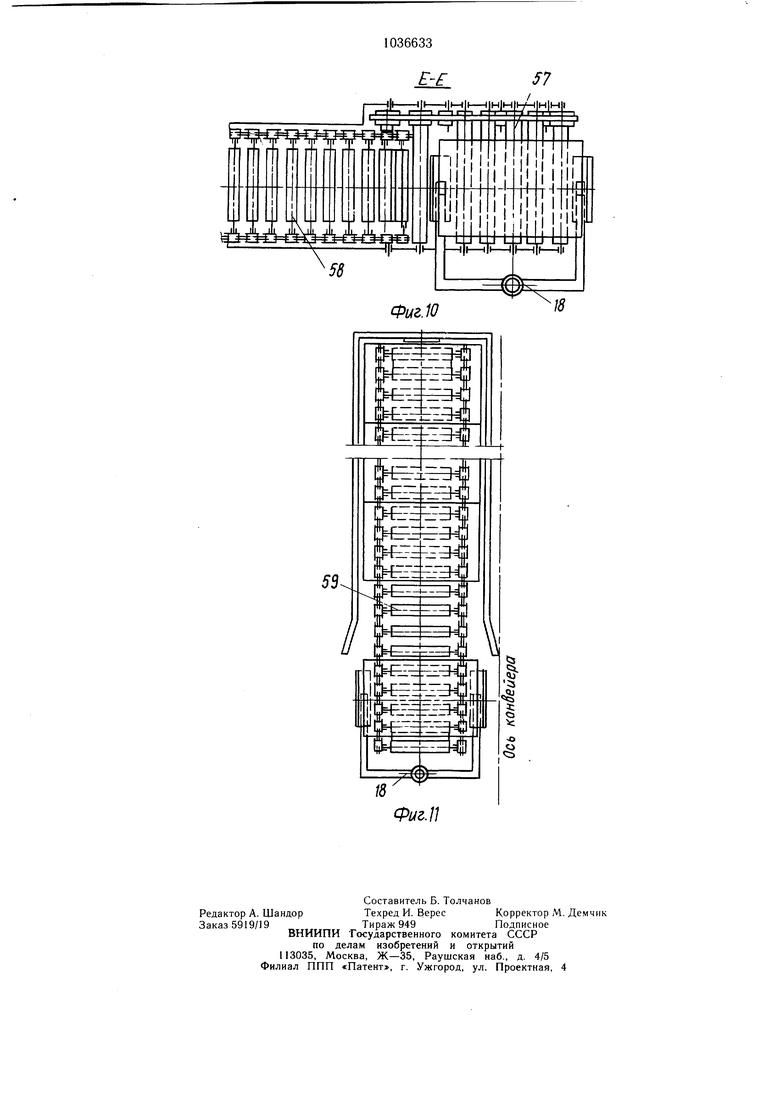
На фиг. 1 показано устройство для погрузки И разгрузки тары; на фиг. 2 - вид А на фиг. ; lia фиг. 3 - подъемно-поворотный механизм; на фиг. 4 - узел I на фиг. 1; на фиг. 5 - разрез Б-Б на фиг. 4; на фиг. 6 - узел II на фиг. 2; на фиг. 7 - разрез В-В на фиг. 6; на фиг. 8 - разрез Г-Г на фиг. 6; на фиг. 9 - разрез Д-Д на фиг. 8; на фиг. 10 - разрез Е-Е на фиг. 2; на фиг. 11 -- вариант компоновки устройства с накопителем, расположенным вдоль оси конвейера.
Устройство состоит из установленной в направляющих 1 тележки 2 с подъемно-поворотным механиз.мом 3, синхронизирующе 0 4 и фиксирующего 5 приспособлений. Направляющие 1 расположены параллельно оси конвейера и связаны с его ходовы.м путем 6.
Подъемно-поворотный .механизм 3 состоит из установленных на тележке 2 электродвигателя 7, винтовой пары 8 и 9, плунжера 10 с захвато.м 11 и направляющей 12. Электродвигатель 7 муфтой 13 связан с винтом 8, имеющи.м неподвижную опору 14 и скользящую внутри плунжера 10 опору 15. Гайка 9 закреплена в плунжере 10. Плунжер И), пере.мещающийся внутри направляющей 12, имеет палец с роликом 16, взаи.модействующий с пространственны.м пазом 17 направляющей 12. Захват 1 выполнен в виде скобы 18 с приподнятыми отбортованны.ми опорными элементами 19.
Синхронизирующее приспособление 4 включает цегшой контур отбора .мощности от тягового органа конвейера, состоящий из приводной 20 и натяжной 21 звездочек и огибающей их цепи 22 с перемещающимися в направляющих 23 каретками 24, цепной контур перемещения тележки 2 с подъе.мноповоротны.м механизмом 3, состоящий из 0 приводной 25 и натяжной 26 звездочек и огибающей их цепи 27 с поводко.м 28 и включающего механизма 29.
Каретка 24 выполнена в виде корпуса 30, щарнирно закрепленного на цепи 22 с помощью оси 31, с ведущим зубом 32 и ка чающегося подпружиненного удерживающего кулачка 33. Шаг кареток 24 определяется длиной цепи 27, длина цепи 22 кратна щагу кареток 24. Для передачи момента от цепного контура отбора моп ности цепQ но.му контуру перемещения тележки 2 приводные звездочки 20 и 25 закреплены на общем валу 34.
Поводок 28 взаимодействует с тележкой 2 через подъемно-поворотный механизм 3 и закрепленную на нем планку 35 5 с пазом 36.
Включающий механизм 29 состоит из электромагнита 37, качающейся заслонки 38, управляемой последним, вала 39 с рычажной системой, состоящей из рычагов 40-42 и кулачка 43 принудительного возврата в исходное положение. Якорь электромагнита 37 связан с рычагом 40 тягой 44. Рычаг 41 имеет палец 45, взаимодействующий с пазом 46 заслонки 38. Рычаг 42 связан с рычагом 47 кулачка 43 тягой 48. Фиксирующее приспособление 5 состоит из фиксирующих подвеску рычагов 49, закрепленных на поворотных корпусах 50 с пространственными пазами 51, и перемещающейся в направляющих 52 планки 53 с роликами 54, взаимодействующими с прост ранственными пазами 51. Планка 53 шарнирно закреплена на поводке 28. В режиме разгрузки устройство работает следующим образом. При подходе подвески с грузом, заадресованным в данный пункт разгрузки, считывающее приспособление (не показано) дает сигнал на операцию разгрузки. По команде считывающего приспособления включается электромагнит 37 и заслонка 38 поднимается в рабочее положение. Заслонка 38 поворачивает каретку 24 вокруг оси 31, устанавливая ее в рабочее положение. В момент совпадения осей подвески 55 и подъемно-поворотного механизма 3 ведущий палец 56 тягового органа конвейера, закрепленный на определенном расстоянии от подвески 55, сцепляется с кареткой 24 и приводит в движение цепной контур отбора мощности и цепной контур перемещения подъемно-поворотного механизма 3. С началом движения поводка 28 начинается синхронное движение подвески 55 и подъемно-поворотного механизма 3. В ходе движения поводка 28 по звездочке 26 планка 53 фиксирующего приспособления 5 поднимается, поворачивает рычаги 49 и подвеска 55 фиксируется в положении, соосном с подъемно-поворотным механизмом 3, возможное раскачиваниие подвески устраняется. С заверщением фиксации подвески, датчиком (не показан) включается электродвигатель 7 подъемно-поворотного механизма 3, электромагнит 37 отключается. В ходе вертикального перемещения плунжера 10 захват 11 приподнимается над пригодной роликовой секцией 57, поворачивается на 90° до соосного с конвейером положения и снимает тару с подвески. Все эти движения, вертикальное перемещение и поворот захватов, определены конфигурацией пространственного паза 17 направляющей 12 В ходе движения поводка 28 по звездочке 26 планка 53 опускается, разводит рычаги 49, подвеска 55 расфиксируется. С заверщением расфиксации подвески начинается движение тележки 2 в обратную сторону - возврат в исходное положение. Во время возврата подъемно-поворотного механизма 3 в исходное положение рычаги 49 остаются разведенными, что определяется конфигурацией пространственных пазов 51. В исходном положении подъемно-поворотного механизма 3 каретка 24 расцепляется с ведущим пальцем 56 тягового органа конвейера. Момент расцепления определяется положением края направляющей 23, где каретка 24 опрокидывается, движение синхронизирующего приспособления 4 и тележки 2 прекращается. В этот момент следующая каретка 24 останавливается на включающем механизме 29 в нерабочем- положении. При этом, подходя к включающему механизму 29, каретка 24 наезжает на кулачок 43 и принудительно возвращает заслонку 38 и якорь электромагнита 37 в исходное положение. В исходном положении подъемно-поворотного механизма 3 датчиком (не показан) включается электродвигатель 7 и тара опускается на приводную роликовую секцию 57, которая передает тару на роликоцепной конвейер-накопитель 58. Процесс разгрузки заверщен. В режиме погрузки устройство работает следующим образом. При подходе свободной подвески к данному пункту погрузки датчик свободной подвески, установленный на определенном расстоянии, дает сигнал на операцию погрузки. По команде датчика включается электромагнит 37 и электродвигатель 7, захват 11 снимает тару с роликовой секции 57 и выносит ее на ось конвейера. В момент совпадения осей подвески и подъемно-поворотного механизма 3 происходит сцепление ведущего пальца 56 тягового органа конвейера с кареткой 24 и начинается синхронное движение подвески и тележки 2. В ходе этого движения подвеска фиксируется, включается электродвигатель 7 и при движении плунжера 10 вниз тара ставится на подвеску, а захват 11 опускается вниз с поворотом на 90°. В ходе дальнейщей работы синхронизирующего приспособления 4 подвеска расфиксируется и тележка 2 возвращается в исходное положение. В исходном положении подъемно-поворотного механизма 3 каретка 24 расцепляется с ведущим пальцем 56 тягового органа конвейера. Процесс погрузки заверщен. С ролико-цепного конвейера-накопителя 58 на приводную роликовую секцию 57 передается следующая тара для погрузки. Устройство может выполнять погрузочно-разгрузочные операции между подвесным конвейером и технологическим конвейером или ролико-цепным конвейером-накопителем 58, установленным перпендикулярно оси подвесного конвейера, с ориентацией тары длинной стороной вдоль оси технологического конвейера (фиг. 10), а также между подвесным конвейером и роликоцепным конвейером-накопителем 59 или любым другим накопительным средством, установленным параллельно оси подвесного конвсйера, с ориентацией тары короткой стороной вдоль конвейера, что рационально при накоплении, с возможностью дальнейшей выдачи тары на технологический конвейер, установленный перпендикулярно оси подвесного конвейера, с ориентацией тары длинной стороной вдоль оси технологического конвейера.
Экономический эффект от применения устройства состоит в упрощении конструкции и управления за счет выполнения синхронизирующего приспособления в виде двух цепных контуров, приводимых в движение конвейером и сообщающих подъемно-поворотному механизму синхронное с подвеской конвейера движение в одном направлении и возврат в исходное положение.
Оснащение включающего механизма дополнительным кулачком и рычажным .механизмом принудительного возврата в исходное положение повыщает надежность устройства предотвращая ложные срабатывания.
Конструктивное решение фиксирующего приспособления с использованием движения водила синхронизирующего устройства обеспечивает жесткую фиксацию подвески в процессе погрузки (разгрузки) тары, предотвращая возможную раскачку подвески в двух направлениях, и строгую ориентацию подвески относительно захватов устройства, что повышает точность и надежность работы устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Подвесной конвейер | 1984 |
|
SU1234302A1 |
| Пространственная транспортная система | 1981 |
|
SU982991A1 |
| Подвесной грузонесущий конвейер | 1989 |
|
SU1654159A1 |
| Устройство для перемещения и погрузки изделий | 1984 |
|
SU1161439A1 |
| Устройство для перемещения и перегрузки | 1986 |
|
SU1326512A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ПОДВЕСОК ПОДВЕСНОГОКОНВЕЙЕРА | 1972 |
|
SU328045A1 |
| Подвесной грузонесущий конвейер | 1988 |
|
SU1616846A1 |
| Устройство для навешивания изделий на подвесной конвейер | 1985 |
|
SU1265121A1 |
| Устройство для монтажа водозащитного зонта | 1983 |
|
SU1162987A1 |
УСТРОЙСТВО ДЛЯ ПОГРУЗКИ И РАЗГРУЗКИ ТАРЫ, включающее установленную в продольных направляющих тележку с подъемно-поворотным механизмом, имеющим захват, синхронизирующее и фиксирующее приспособления, отличающееся тем, что, с целью упрощения конструкции и повыщения надежности, синхронизирующее приспособление выполнено в виде цепного контура отбора мощности со сцепными каретками, связанного с ним цепного контура синхронизации движения подъемно-поворотного механизма с поводком, установленным с возможндстью взаимодействия с тележкой, и включающего механизма с кулачком и рычажной системой принудительного возврата в исходное положение, а фиксирующее приспособление выполнено в виде поворотных корпусов с пространственными пазами и рычагами и щарнирно смонтированной на поводке планки с роликами, установленными на ней с возможностью размещения в пространственных пазах поворотных корпусов. (Л со 05 О5 СО СО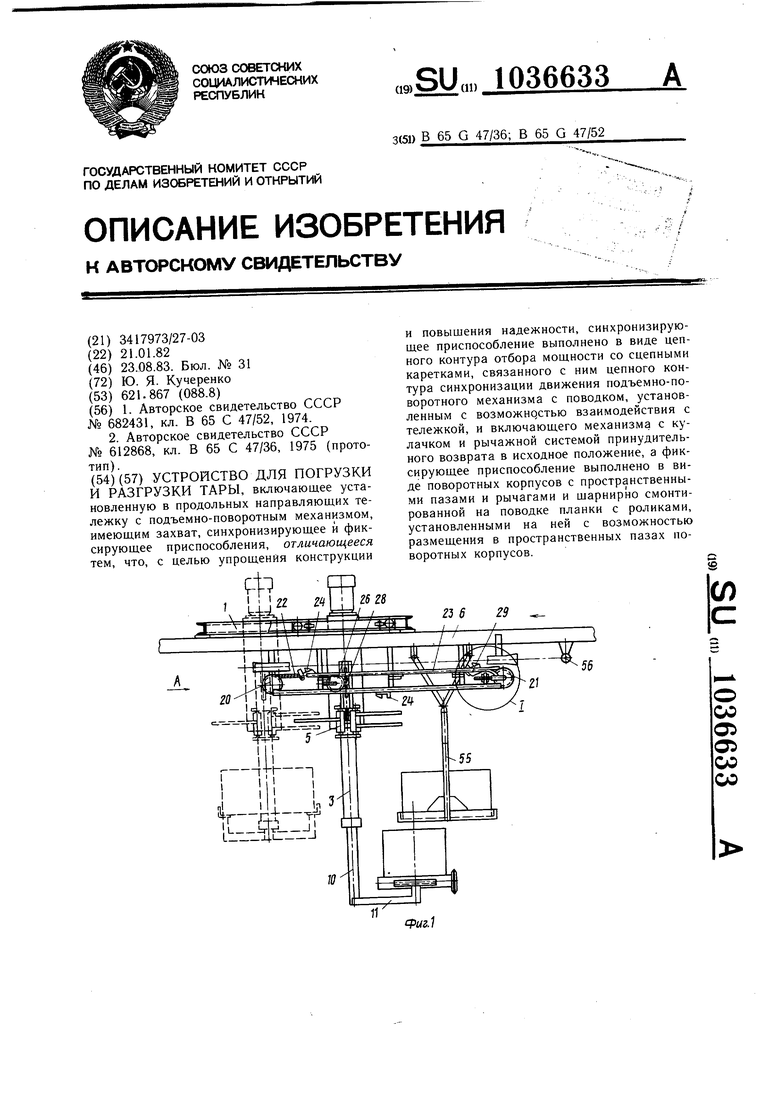
Фиг.5
|д
д1
Фцг.8
Е
ФигЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для перегрузки подвесок с подвесного грузонесущего конвейера на рабочее место | 1975 |
|
SU612868A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
