(54) ЗАХВАТ ДЛЯ ПРОВОДОВ
1
Изобретение относится к электротехнике, а конкретно к захватам для проводов, и может быт4 использовано при изготовлении жгутов проводов.
Известен захват проводов в виде отверстия в шаблоне для раскладки проводов с закрепленным в отверстии упругим материалом со щелевыми резервги ш. В эти щели вставляются и удерживаются в них провода 1.
Известен также захват провода, содержащий корпус, неподвижно закрепленные на корпусе элементы и вставленные между ними подвижные стержневые держатели. Подвижные и неподвижные элементы на взаимодействующих поверхностях имеют пазы в виде трехгранной призмы. В пазах установлены ролики с пониженным трением качения. Провод зажимается между подвижными элементами захвата. Усилие захвата обеспечивается взаимным смещением пазов подвижных и неподвижных элементов и заклиниванием в них роликов 2j.
Однако захват обеспечивает надежное удерживание провода, но имеет сложную конструкцию и затрудняет его эксплуатацию, так как при освобождении провода подвижные элементы приходится сдвигать вручную, следовательно, весь процесс захвата и освобождения провода не может быть автоматизирован.
Цель изобретения - упрощение конструкции и эксплуатации захвата провода.
Поставленная цель достигается тем, что в захвате провода, содержащем
10 неподвижный и подвижный элементы с пазами, подвижный элемент выполнен в виде полого цилиндра с несимметричным и -образным открытым пазом у основания цилиндра и вставлен с воз15можностью поворота вокруг оси в неподвижный элемент, в котором выполнен паз с конфигурацией в виде Зеркального отображения первого.
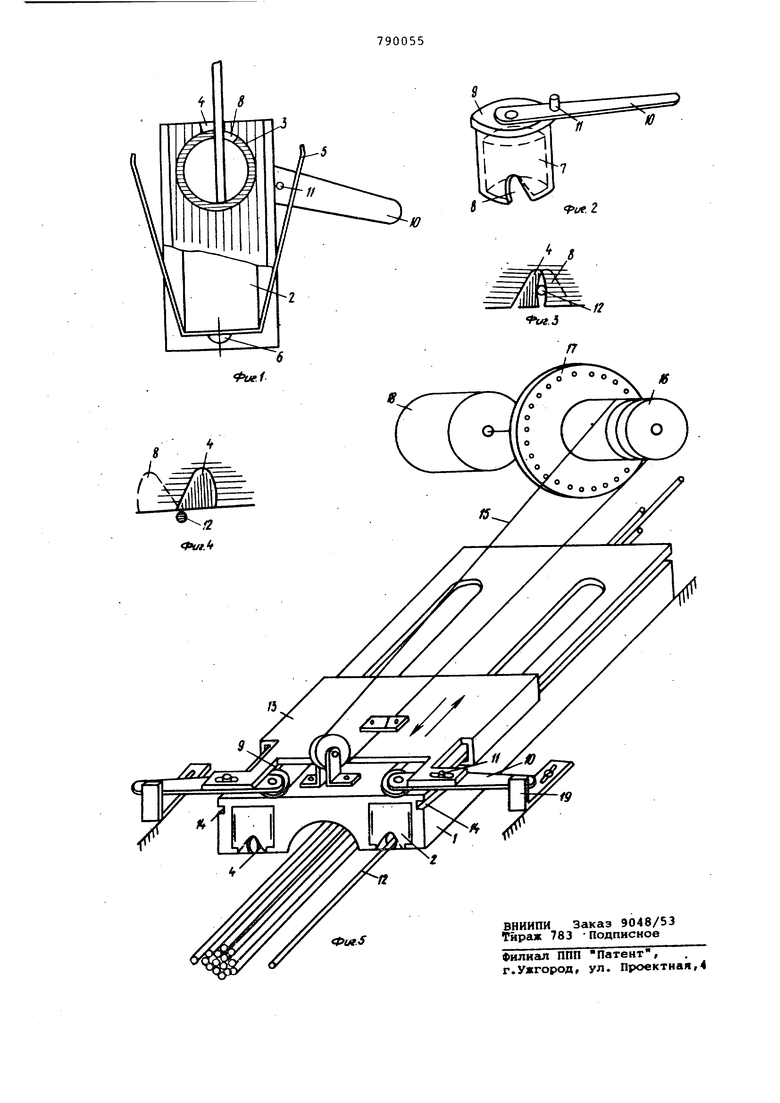
На фиг. 1 схематически изображен
20 захват в открытом положении} на фиг. 2 - подвижный элемент захвата} на фиг. 3 - взаимное положение пазов в момент захвата провода; на фиг. 4 то же, при открытом захвате; на
25 фиг. 5 - пример использования захвата.
в корпусе 1 (фиг. 5 установлен неподвижный элемент 2 захвата (фиг. 1) в виде прямоугольного стержня. На
30 одном конце стержня выполнено сквознов отверстие 3, в торце - несимметричный и-образный паз 4. На другом конце стержня закреплена пружина 5 винтом 6. В сквозное отверстие 3 вставлен подвижный элемент 7(фиг. 2) в виде полого цилиндра. На одном кон трубки выполнен несимметричный паз 8 с конфигурацией в виде зеркального отображения паза 4. На другом конце трубки 7 э опорном буртике 9 закреплен рычаг 10 со штифтом 11. Рычаг 10 обеспечивает поворот трубки 7 относительно стержня 2, при э-гсм меняется взаимное положение пазов 4 и 8.
Захват ре1ботает следующим образом.
Провод вставляется в захват, когда пазы 8 и 4 совмещены. При повороте элемента 7 с помощью рычага 10 происходит смещение пазов 4 и 8 (фиг. 3), благодаря чему зажимается провод 12. Поворотом подвижного элемента 7 в обратном направлении осуществляется постепенное вытеснение провода 12 одной (пологой)стороной паза 8 (фиг. 4) из паза 4 в отверстие 3, после чего провод выпадает из захвата.
На фиг. 5 показан пример использования захвата в механизме протяжки проводов полуавтомата изготовления кгутов. В корпусе 1 на направлящих установлены два згисвата.
Через штифты 11 рычагов 10 захваты соединены с кареткой 13. Каретка установлена на направляющих 14 корпуса 1 и посредством троса 15 содинена с барабансж 16 считывающего устройства 17 програивлного блока . (на чертеже не показан). Механизм работает в реверсивном режиме от двигателя 18 по командам с программного блока. В процессе работы рычаги 10 взаимодействуют с упорами 19.
Механизм протяжки проводов работает следукхцим образом.
В исходном положении пазы 4 и 8 захватов совмещены за счет взаимодействия рычагов 10 с упорами 19. В положении в захват вручную
вставляется мерный провод 12. Включается двигатель 18, который приводит в движение каретку 13. При этом разворачивается рычаг 10, который поворачивает подвижный элемент 7 захвата. Пазы 4 и 8 смещаются и зажимают провод 12 (фиг. 3 и 1). Далее каретка 13 с зажимным проводом 12 перемещается вдоль корпуса 1 на длину, заданную програ1Ф1ным блоком. Включается механизм оплетения жгута (на чертеже не показан) и прижимает отмеренный провод к жгуту. После команды на реверс двигателя каретка начинает обратное движение. При этом каретка через штифт 11 действует на рычаг 10, пазы 4 и 8 разводятся и освобождают провод, выталкивая его (фиг. .4). Затем каретка возвращается в исходное положение, где рычаги 10 обеспечивают совмещение пазов
благодаря взаимодействию с упорами 19. Таким образом, предлагаемый захват состоит из простых деталей, прост в . изготовлении и эксплуатации. Захват осуществляет надежную фиксацию провода. Конструкция захвата обеспечивает автоматический зажим и освобождение провода , что позволяет использовать его в автоматических устройствгис.
Формула изобретения
Захват для проводов, содержгиций неподвижный и подвижный элементы с пазами отличающийся тем, что, с целью упрощения конструкции и эксплуатации, подвижный элемен выполнен в виде полого цилиндра с несимметричньм U-образным открытым пазом у основания, паэ неподвижного элемента является зеркальным отображением паза подвижного элемента, при этом последний установлен в неподвижном с возможностью поворота вокруг оси.
Источники информации, принятые во взимание при экспертизе
1.Патент США 3699630, кл. Н 05 К 3/32, 1972.
2.Патент Японии 50-511, кл. Н 02 О- 7/02, 1974.