(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО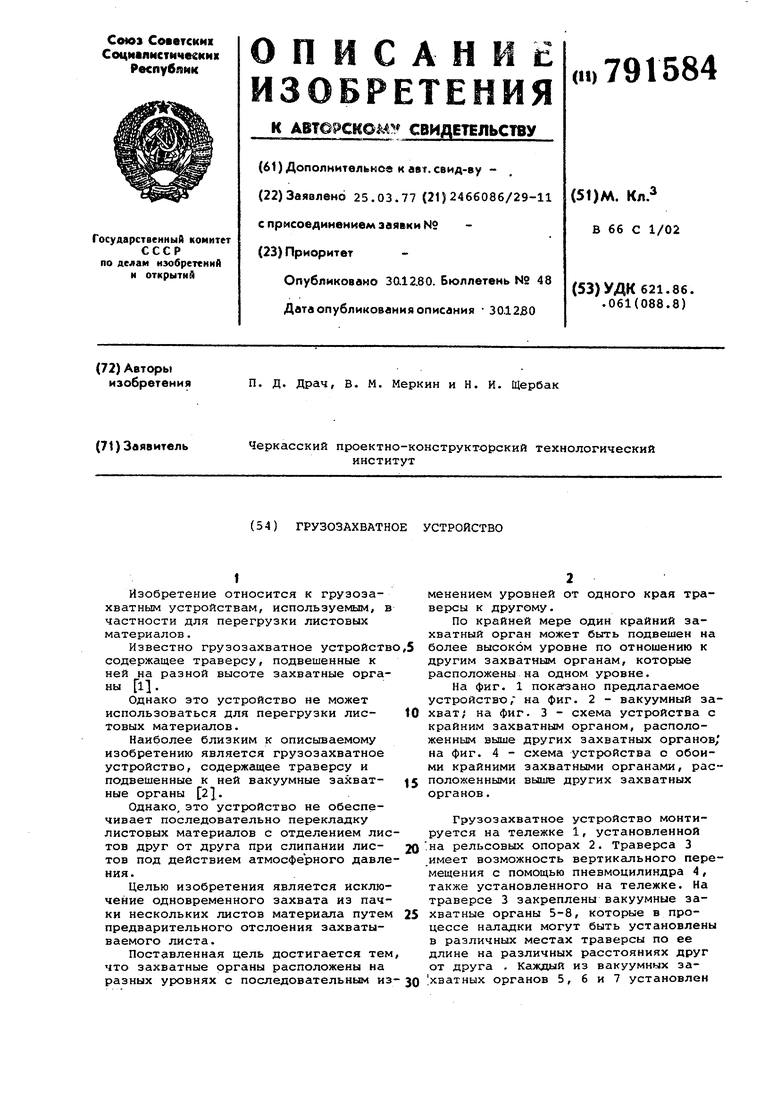
| название | год | авторы | номер документа |
|---|---|---|---|
| ВПТ5;•?"?>&' | 1973 |
|
SU406793A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Грузозахватное устройство | 1977 |
|
SU640953A1 |
| Грузозахватное устройство для листовых материалов | 1990 |
|
SU1736898A1 |
| УСТАНОВКА ДЛЯ СБОРКИ И СВАРКИ ПОЛОТНИЩ С ПЕРЕКРЕСТНЫМ НАБОРОМ РЕБЕР ЖЕСТКОСТИ | 1992 |
|
RU2089368C1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1968 |
|
SU206825A1 |
| Вакуумный захват перегрузочного устройства | 1983 |
|
SU1100213A1 |
| Захват-кантователь | 1977 |
|
SU839970A1 |
| Устройство для гашения колебаний грузовой подвески крана | 1975 |
|
SU587085A1 |
I
Изобретение относится к грузозахватным устройствам, используемым, в частности для перегрузки листовых материалов.
Известно грузозахватное устройство,5 содержащее траверсу, подвешенные к ней на разной высоте захватные органы 11Однако это устройство не может использоваться для перегрузки лис- 10 товых материалов.
Наиболее близким к описываемому изобретению является грузозахватное устройство, содержащее траверсу и подвешенные к ней вакуумные захват- 5 ные органы 2.
Однако, это устройство не обеспечивает последовательно перекладку листовых материалов с отделением листов друг от друга при слипании лис- 20 тов под действием атмосферного давления.
Целью изобретения является исключение одновременного захвата из пачки нескольких листов материала путем 25 предварительного отслоения захватываемого листа.
Поставленная цель достигается тем, что захватные органы расположены на разных уровнях с последовательным из- зо
менением уровней от одного края траверсы к другому.
По крайней мере один крайний захватный орган может быть подвешен на более высоком уровне по отношению к другим захватным органам, которые расположены на одном уровне.
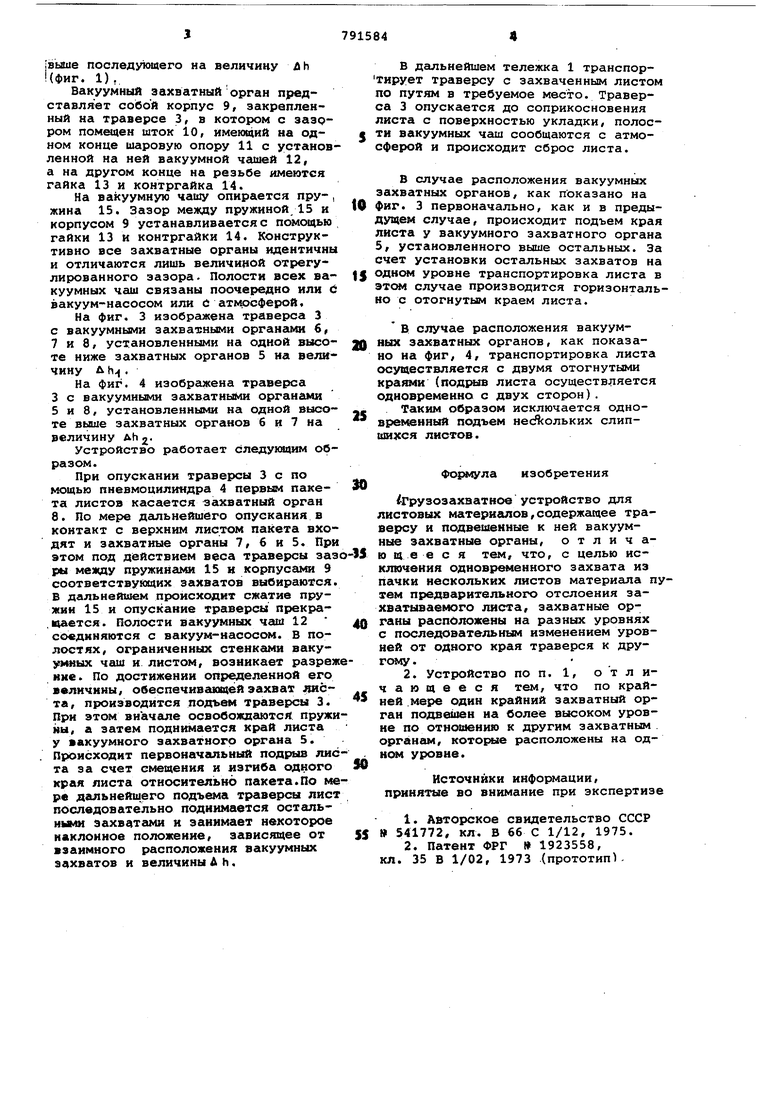
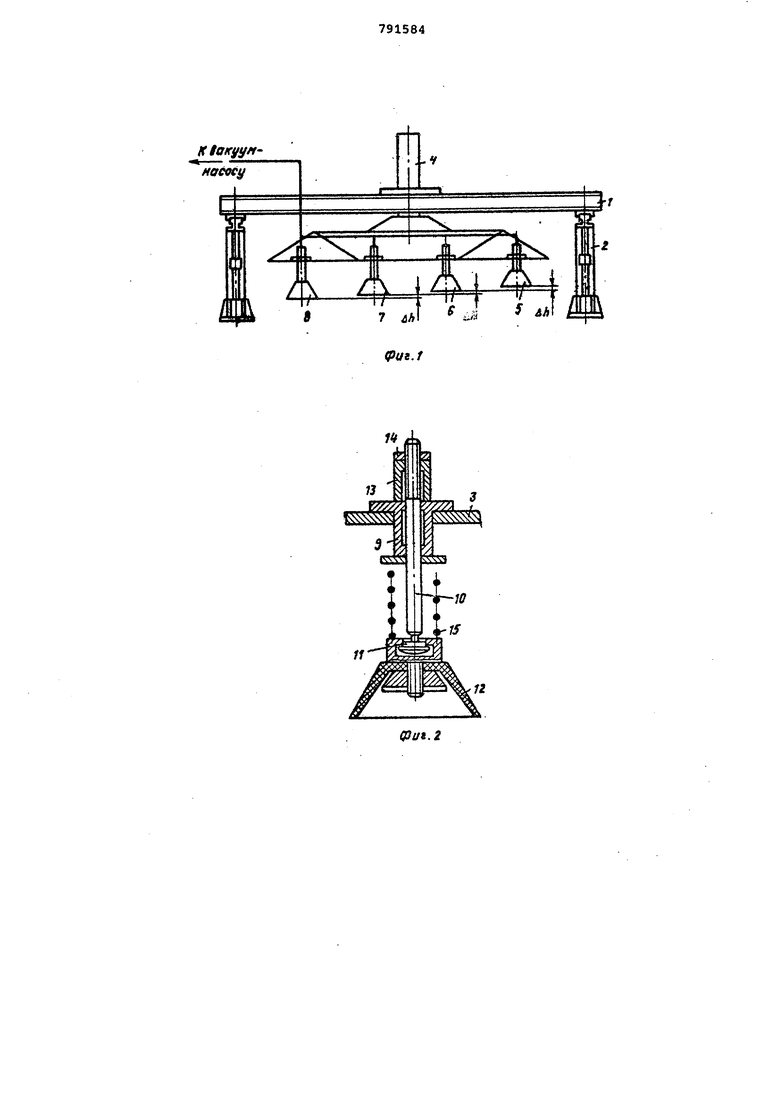
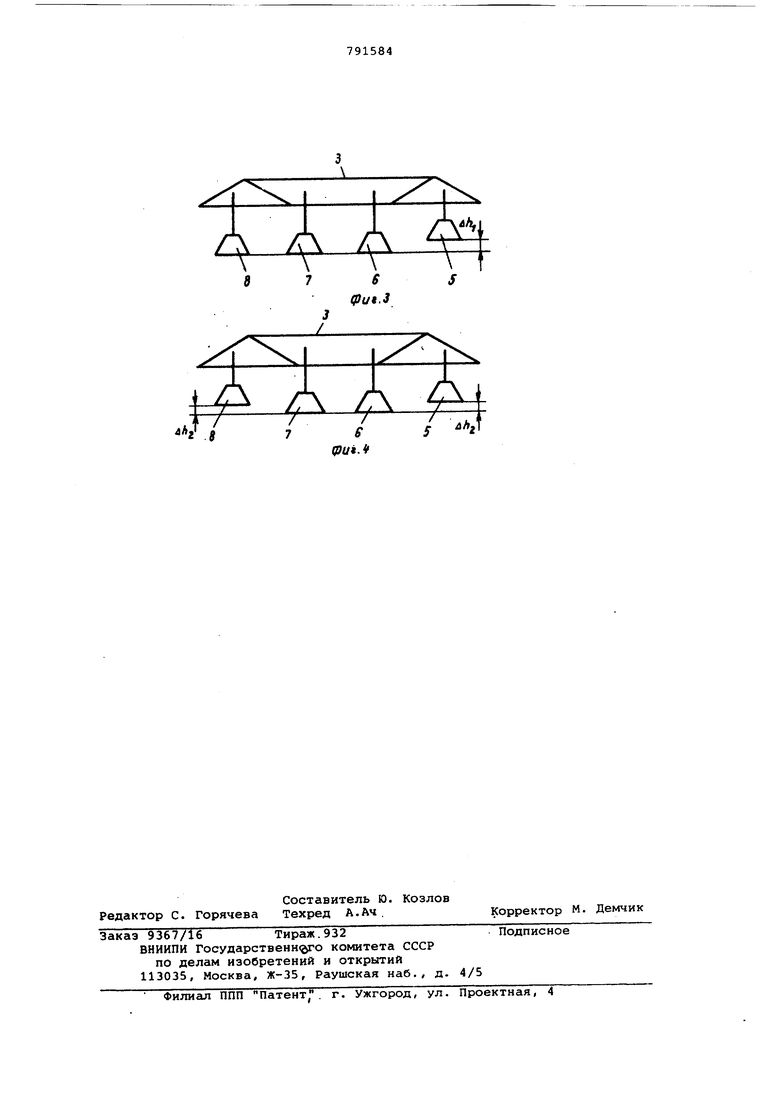
На фиг. 1 показано предлагаемое устройство; на фиг. 2 - вакуумный захват; на фиг. 3 - схема устройства с крайним захватным органом, расположенным выше других захватных органов, на фиг. 4 - схема устройства о обоими крайними захватными органами, расположенными выше других захватных органов.
Грузозахватное устройство монтируется на тележке 1, установленной .на рельсовых опорах 2. Траверса 3 имеет возможность вертикального перемещения с помощью пневмоцилиндра 4, также установленного на тележке. На траверсе 3 закреплены вакуумные захватные органы 5-8, которые в процессе нешадки могут быть установлены в различных местах траверсы по ее длине на различных расстояниях друг от друга . Каждый из вакуумных за хватных органов 5, 6 и 7 установлен
jBbBue последукявего на величину и h (Фиг. 1),
Вакуумный захватныйорган представляет собой корпус 9, закрепленный на траверсе 3, в котором с зазором помещен шток 10, имеющий на одном конце шаровую опору 11 с устаиовленной на ней вакуумной чашей 12, а на другом конце на резьбе имеются гайка 13 и контргайка 14.
На вакуумную чашу опирается пру-, жина 15. Зазор между пружиной 15 и корпусом 9 устанавливается с помощью гайки 13 и контргайки 14. Конструктивно все захватные органы идентичны и отличаются лишь величиной отрегулированного зазора. Полости всех вакуумных чаш связаны поочередно или d вакуум-насосом или с ,
На фиг. 3 изображена траверса 3 с вакуумными захватными органами б, 7 и 8, установленными на одной высоте ниже захватных органов 5 на величину & h .
На фиг. 4 изображена траверса 3 с вакуумными захватными органами 5 и 8, установленными на одной высоте выше захватных органов 6 и 7 на величину Ah 2Устройство работает следующим образом.
При опускании траверсы 3 с по мощью пневмоцилкндра 4 первым пакета листов касается захватный орган 8. По мере дальнейшего опускания в контакт с верхним листом пакета входят и захватные органы 7, 6 и 5. При этом под Действием веса траверсы заз ры между пружинами 15 и корпусами 9 соответствующих захватов выбираются, в дальнейшем происходит сжатие пружин 15 и опускание траверсы прекра.14ается. Полости йакуумных чаш 12 соединяются с вакуум-насос(4. В полостях, ограниченных стенками вакуУ11ШЫХ чаш и листом, возникает разрежние . По достижении определенной его величины, обеспечивающей захват даста, производится подъем траверсы 3. При этом вначеше освобождаются пружины, а затем поднимается край листа у вакуумного захватного органа 5. Происходит первоначальный подрыв лис та за счет смещения и изгиба одного края листа относительно пакета.По мере дальнейшего подъема траверсы лист последовательно поднимается остальными захватами и занимает некоторое наклонное положеиие, зависящее от взаимного расположения вакуумных захватов и величины Д h.
В дальнейшем тележка 1 транспор1ирует траверсу с захваченным листом по путям в требуемое место. Траверса 3 опускается до соприкосновения листа с поверхностью укладки, полости вакуумных чаш сообщаются с атмосферой и происходит сброс листа.
В случае расположения вакуумных захватных органов, как показано на фиг. 3 первоначально, как и в предыдущем случае, происходит подъем края листа у вакуумного захватного органа 5, установленного выше остальных. За счет установки остальных захватов на одном уровне транспортировка листа в этом случае производится горизонтально с отогнутым краем листа.
В случае расположения вакуумных захватных органов, как показано на фиг, 4, транспортировка листа осуществляется с двумя отогнутыми кратки (под1хлв листа осуществляется одновременно с двух сторон).
Таким образом исключается одновременный подъем нес ольких слипшихся листов.
Формула изобретения
Грузозахватное устройство для листовых материалов,содержащее траверсу и подвешенные к ней вакуумные захватные органы, отличающее с я тем, что, с целью исключения одновременного захвата из пачки нескольких листов материала птем предварительного отслоения захватываемого листа, захватные органы расположены на разных уровнях с последовательным изменением уровней от одного края траверся к другому .
Источники информации, принятые во внимание при зкспертиз
Kloifyyff
