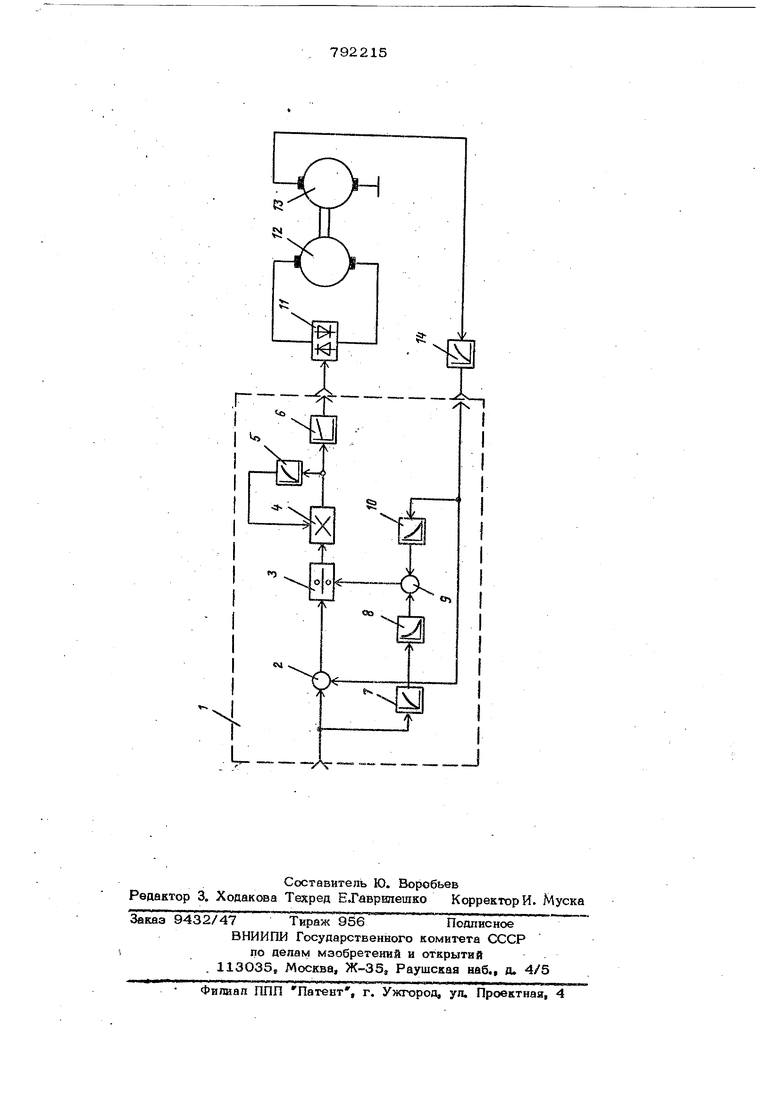
(54) САМОНАСТРАИВАЮЩИЙСЯ РЕГУЛЯТОР ; ДЛЯ ЭЛЕКТРОПРИВОДА ПРОМЫШЛЕННОГО Изобретение относится к электротехнике, а именно к системам автоматического управления нестационарными объектами, и может быть использовано для адаптивного управления электроприводами промыш ленных механизмов. Известно устройство для адаптивного управления нестационарными объектами ш. Наиболее близким к предлагаемому по технической сущности является устройство содержащее щфференцирующий блок сигна- па обратной связи электропривода, последовательно соединенные узел сравнения, к одному из входов которого подключена обратная связь электропривода, делитель, умножитель с фильтром в депи обратной связи и пропорционально-интегральный блок 2j. Недостатком известных устройств является уменьшение производительности управляемых механизмов в переходных процессах вследствие уменьшения коэффициента передачи в момент приложения возмушения. МЕХАНИЗМА Целью изобретения является повышение производительности механизма. Указанная цель достигается тем, что в устройство дополнительно введены последовательно соединенные фильтр, второй дифференцирующий блок и сумматор, второй вход которого соединен с выходом дифференцирукяцего блока сигнала обратной связи электропривода, выход - со вторым входом делителя, а вход фильтра соединен с другим входом узла сравнения. На чертеже приведена блок-схема системы электропривода постоянного тока промышленного механизма с самонастраивающимся регулятором. Самонастраивающийся регулятор 1 содержит последовательно соединенные узел сравнения 2,- один вход которого является входом регулятора 1, делитель 3, умножитель 4 с фильтром 5 в цепи обратной связи, пропорционально-интегральный бпок 6, выход которого является выходом регулятора 1. К входу регулятора 1 последовательно присоединены фильтр 7, дифференцирующий блок 8, сумматор 9, выход которого соединен со вторым входом делителя 3, а второй вход сумматора 9 соединен с выходом дифференцирующего блока Ю сигнала обратной связи электропривода. Выход регулятора 1 соединен с входом реверсивного преобразователя 11, выход которого подключен к двигателю постоянного тока 12 электропривода с тахоГенератором 13, сигнал которого через фильтр 14 обратной связи электропривода подключен к регулятору 1, а именно к вхо дам блока 10 и узла сравнения 2, Устройство работает следующим образом. Прк подаче на вход регулятора 1 сигнала управления он поступает на последователыю соединённые узел сравнения 2, делитель 3 и умножитель 4. Начальные смещения блоков 3 и 4 выбраны так, что коэффициент передачи регулятора 1 равен единице. Тогда сигнал с выхода умножителя 4 равен сигналу на входе делителя 3 и поступает одновременно на вход фильт ра 5 и блок 6. Параметры фильтра 5 вы браны так, что его движение описывается уравнениями, аналогичными дифференциальным управлениям подсистемы, состоящей из последовательно соединенных преобразо вателя 11, двигателя 12, тахогенератора 13, фильтра 14 и дифференцирующего блока 10. Параметры фильтра 7 дифференцирующего блока 8 совпадают по фазе с сигналом с выхода блока Ю. Далее сигнал с выхода блока 6 поступает на преобразователь 11. В зависимости от поляр ности входного сигн.ала открывается одна из двух групп реверсивного преобразователя 11, Изменяется ток в якорной цепи. Двигатель 12 изменяет исходную скорость вращения. Информация о скорости снимает ся с тахогенератора 13 и через фильтр 14 поступает одновременно на узел сравнения 2 и бпок 1О. В спучае когда коэффициент передачи объекта равен заданному за счет выбора весовых коэффициентов блоков 8 и 10 обеспечивается равенство сигналов с выхода сумматора. 9 и. фильтра 5. При этом коэффициент передачи регулятора 1, определяемый как отношение сигнала с выхода фильтра 5 к сигналу с выхода сумматора 9, равен единице. При равенстве сигналов управления на входе регулятора 1 и выходе фильтра 14 разгон двигателя 12прекращается. Систе ма находится в новом установившемся со стоянии, в спучае когда коэффициент пере дачи объекта отличается от заданного в раз. Из-за неравенства коэффициентов ередачи подсистемы из элементов 11, 2, 13, 14, 10 и фильтра 5 сигнал с ыхода блока 10 в ч раз меньше требумого. При этом коэффициент передачи егулятора 1 определяется из следукшего оотношения: г.,.) ЩГ (7 Utpv -сигнал на выходе первого фильтра в момент времени t , - сигнал на выходе второго дифференциального блока; -сигнал на выходе первого дифференцирующего блока; Y - начальньге смещения на блоках 3 и 4. Параметры блоков 8 и 10 выбраны ак, что L --м1 1 3 1- , где о.. & - весовые коэффициенты, для котоых справедливо равенство j 4 Тогда, пренебрегая малыми величинами ачальных смещений коэффициент пеедачи регулятора 1 определяется из слеующего отношения: Kri)nfcAn+/b) Увеличение настраиваемого коэффициента приводит к пропорциональному увеличению сигналов на вькоде блоков -5 и 10. огда настраиваемый коэффициент в момент -I С определяется как K Ji-m. .(VT)|bl.(t..T)Kft,) Аналогично процесс самонастройки продолжается далее до величины и) при этом К (t.) К (fc -fC ). Данное состояние регулятора 1 устойчиво, так как при K(t.)4.h имеем k()K(t),caMOHaстройка происходит в стороау увеличения коэффициента. При К (t) h имеем Kit t)Z. ),. самонастройке проиоходиг в сторону уменьшения коэффициента. При скачкообразном изменении нагрузки регулятор 1 отрабатывает возмушение по моменту статических сопротивлений .следующим образом. На выходе блока Ю появляется сигнал tf с весовым коэффициентом . Начинает изменяться скорость двигателя 12. На выходе узпа сравнения 2 появляется сигнал ошибки рассогпасования, который поспедовательно преобразуется через блоки 3 и 4 с коэффициентами передачи f,(f ) За счет выбора соответствующей величины весового коэффициента Ь в начальный момент отработки возмущающих воздействий удается получить больший начальный коэффициент передачи регулятора 1. С выхода умножителя 4 сигнал поступает одновременно на входы фильтра 5 и блока 6. Затем преобразуется в блоке 6 и поступаэт на вход преобразователя li. Ток в якорной цели начинает изменяться с целью ко пенсировать приложенную к двигателю 12 нагрузку. Информация о скорости двигателя 12 с тахогенератора 13 через фильтр 14 поступает на узел сравнения 2 и блок 1О. Одновременно сигнал с выхода фильтра 5 приводит к увеличению коэффициента передачи регулятора 1. При этом увеличивается сигнал с выхода блока 6. Ток в якорной цепи возрастает. Скорость восстанавливается до заданной. За счет увеличения коэффициента передачи регулятора 1 происходит быстрая компенсация момента по нагрузке и восстановление заданной скорости двигателя 12. При уменьшении сигнала рассогласования с выхода узла 2 величина сигнала с выхода умножителя 4 также уменьшается, Поспедовательно уменьшается сигнал с выхода фильтра 5. В установившемся состоянии коэффициент передачи регулятора 1 равен исходному. Система движется с заданной скороетью. Сигнал задания на ток с выхода регулятора 1 пропорционален новой величине нагрузки на двигатель 12. Таким образом, введение фильтра входного сигнала, дифференцирующего блока, сумматора и включение их указанным выше способом позволяет значительно улучшить инвариантность по моменту статических сопротивлений и тем самым повысить производительность механизма. Про-i ведеиные расчеты показали, мод низацвя электропривода одного кошфовально- р& зерного станка номенклатуры Ленинградского станкостроительного производственного объединения им. Ф, М. Свердлова позволяет увеличить производительность станка более, чем на 1О%, что дает годовой ; экономический эффект около 5,1 тыЬ. руб. на один станок. Формула изобретений Самонастраивающийся регулятор для электропривода промышленного механизма, содержащий дифференцирующий блок сигнала обратной связи электропривода, последовательно соединенные узел сравнения, к одному из входов которого подключена обратная связь электроприводе, делитель,: умножитель с фильтром в цепи обратной связи и пропорционально-интегральный блок, отличающийся тем, что с целью повышения производительности механизма, в него дополнительно введены последовательно соединенные фильтр, второй дифференцирукяыий блок и сумматор, вход которого соединен с выходом дифференцируклцего блока сигнала, обратной связи электропривода, вьЬюд с вторым входом делителя, а вход фильтра соединен с другим входом узла сравнения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 439222, кл, (г 05 В 13/С2, 8.12.71. 2.Патент ФРГ № 1815964, л, G 05 В 13/ОО, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающийся привод | 1979 |
|
SU851338A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для измерения нагрузки на копающий механизм экскаватора | 1978 |
|
SU688567A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Устройство для управления электроприводом постоянного тока | 1977 |
|
SU748753A1 |
| Самонастраивающийся электропривод | 1985 |
|
SU1247831A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Устройство для управления механизмом экскаватора | 1978 |
|
SU773212A1 |