(5) ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР ДЛЯ ОВЬЕКТОВ
I
Изобретение относится к автоматическому yhpaвлeнию объектами с транспортным запаздыванием, обладающими экстремальными статическими характеристиками.
По основному авт.ев: tf 792218 известен экстремальный регулятор,используемый для автоматического управления объектами, в процессе работы которых транспортное запаздывание не меняется. Этот регулятор содержит обратную модель линейной части объекта, последовательно соединенные множительное звено, усилитель и сумматор, второй вход сумматора соединен с выходом генератора поисковых сигналов, а выход со входом интегратора, два дифференциатора, выходы которых соединены с соответствующими входами множительного звена, а входы - соответственно с выходом интегратора и выходом обратной модели линейной масти объекта ll. С ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ
Необходимое условие нормальной работы этого экстремального регулятора заключается в следующем: период Т синусоидального сигнала поискового генератора должен быть в натуральное число раз меньше времени транспортного запаздывания. Если это условие нарушено, то при управлении объектами с переменным транспортным запаздыванием, зависящим,
to например, от величины входного сигнала , быстродействие и точность регулирования могут значительно снизиться, а иногда система может оказаться в зон« неустойчивой работы.
15
Изменение транспортного запаздывания при постоянстве периода Т вызывает возникновение фазового сдвига между сигналами, подаваемыми на входы множительного звена. Наличие
20 фазового сдвига в интервалах углов
ti IT
(О - , (j - 0) приводит к уменьшению управляющего сигнала на входе
391
сумматора из цепи обратной связи, что увеличивает время выхода системы в зону оптимальной работы. Фазовый сдвиг в интервале углов Ш, вызывает изменение знака сигнала обратной связи; и система становится неустойчивой.
Цель изобретения - повышение точности экстремального регулятора при управлении o6T eKtoM с переменным транспортным запаздыванием, зависящим от .величины входного сигнала, предотвращением выхода системы в нe устойчивый режим работы.
Поставленная цель достигается тем, что в известный экстремальный регулятор введены орган сравнения, два , входа которого соединены соответственно с входом интегратора и выходом задающего устройства, и исполнительный орган, включенный между выходом органа сравнения и входом генератора поисковых сигналов.
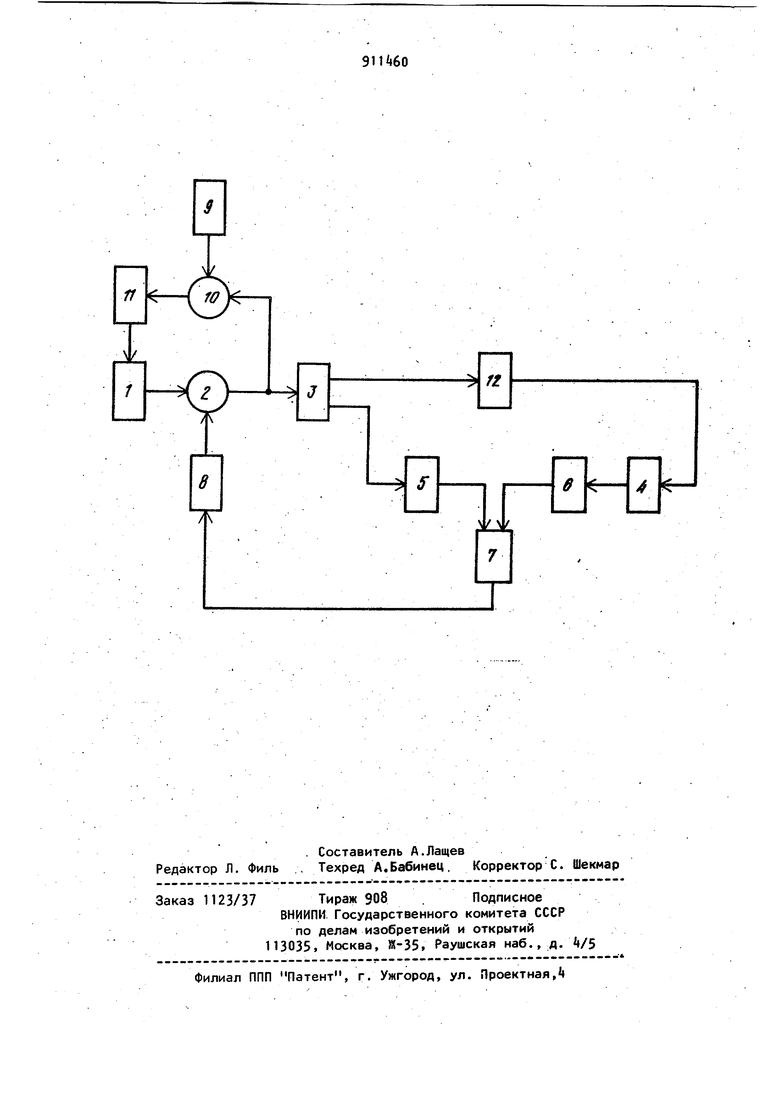
На чертеже представлена функциональна } схема регулятора.
Экстремальный регулятор для объектов с транспортным запаздыванием, зависящим от величины входного сигнала, содержит генератор 1 поисковых сигналов, сумматор 2, интегратор 3, обратную модель линейной части объекта с передаточной функцией линейной инерционной части объекта регулирования, дифференциаторы 5 и 6, множительное звено 7, усилитель 8 сиг нала обратной связи, задающее устройство 9. орган 10 сравнения и исполнительный орган 11. Регулятороптимизирует работу объекта 12 регулирования,имеющего экстремальную статическую характеристику и обладающего передаточной функцией линейного инерционного звена с переменным транспортным запаздыванием.
Изменение входного сигнала объекта регулирования приводит к соответ
ствующему изменению времени транспортного запаздывания и появлению фазового сдвиа. Для устранения последнего необходима коррекция период поискового сигнала. Ее величина определяется путем сравнения входного сигнала объекта 12 регулирования с некоторым калиброванным сигналом, который формируется задающим устройством 9. Полученная на органе 10 соавнения оазность используется для управления исполнительным органом 11 изменяющим период поискового сигнала генератора 1 до устранения фазового сдвига.
Предлагаемый экстремальный регулятор для объектов с переменным транспортным запаздыванием позволяет устранить фазовый сдвиг изменением периода сигнала поискового генератора, если время транспортного запаздывания зависит от величины входного си1- нала объекта. Это обеспечивает постоянное высокое быстродействие системы, высокую точность регулирования и полностью исключает выход системы в неустойчивый режим работы.
Формула изобретения Экстремальный регулятор для объектов с транспортным запаздыванием по авт.св. N 792218, отличающийся тем, что, с целью повышения точности регулятора, в него введены дополнительно орган сравне.ния, два входа которого соединены соответственно с входом интегратора и выходом задающего устройства, и исполнительный орган, включенный между выходом органа сравнения и входом генератора поисковых сигналов .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №792218, кл. 6 05 В 13/02, 1979 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| Устройство для автоматической настройки компенсации емкостного тока однофазного замыкания на землю в электрической сети переменного тока | 1978 |
|
SU748620A1 |
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| йСьСОЮЗНАЯ 1!;:!;Н1110-ТЬХП^1"ЕьИДг БИБЛИОТЕгьА | 1973 |
|
SU368587A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Экстремальный регулятор для резонансного объекта | 1975 |
|
SU590695A1 |