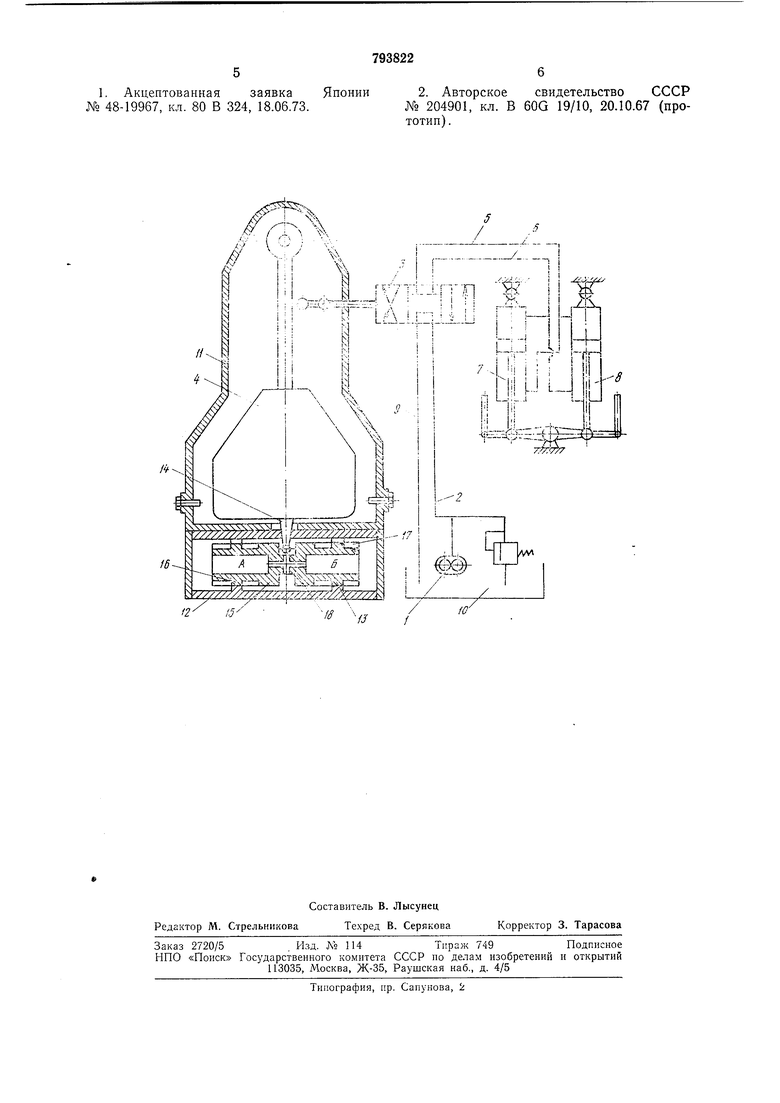
Во время передвижения транспортного средства по горизонтальному участку маятник 4 находится в вертикальном положении, поэтому шарнирно связанный с ним золотник трехпозиционного четырехходового распределителя 3 находится в нейтральном положении. В результате этого гидроцилиндры 7 и 8 замкнуты, и жидкость из гидронасоса 1 по нагнетательному каналу 2 через распределитель 3 и сливной канал 9 поступает в резервуар 10. При передвижении транспортного средства по склону остов наклоняется, и маятник 4 перемещается, например, направо в положение истинной вертикали. Одновременно перемещается поршень 15. Несмотря на то что в пределах зоны нечувствительности системы герметизация между полостями А и Б осуществлена фиксирующими цилиндрическими поясками 13 и 16, жидкость из полости Б вытесняется через калиброванное отверстие 18 и сливается в полость А. Время смещения поршня 15 зависит от размера перекрытия фиксирующих цилиндрических поясков 13 и 16 и от сечения отверстия 18, а величина перекрытия находится в зависимости от размера зоны нечувствительности, т. е. она может быть меньше или равна ей в соответствии с чувствительностью системы. Поршень 15 перемещается направо с большой степенью демпфирования. При продолжении движения поршня 15 направо пояски смещаются относительно друг друга, в результате чего с помощью щелевидных прорезей 17 создается проходное сечение между поршнем и корпусом 12 демпфера, которое больше проходного сечения калиброванного отверстия 18. Благодаря этому жидкость свободно сливается из полости Б к корпусу 1I стабилизатора по образовавшейся щели. Одновременно изза увеличения объема полости А жидкость из корпуса 11 по образовавшейся щели сливается в полость А. Маятник 4 свободно перемещается направо с меньщей степенью демпфирования с одновременным выравниванием остова. Во время выравнивания остова процесс протекает в обратном направлении. Маятник 4 вместе с поршнем 15 из-за щелевидных прорезей 17 начинает смещаться с меньшей степенью демпфирования в левом направлении до момента начала перекрытия фиксирующих цилиндрических поясков 13 и 16. Благодаря этому продольная плоскость остова и маятник 4 синхронно без отставания во времени возвращаются в исходное нейтральное положение. Во время возвращения остова в нейтральное положение маятник 4 заходит в зону нечувствительности системы. Одновременно фиксирующие цилиндрические пояски 13 и 16 начинают перекрываться. Это вызывает уменьшение проходного сечения до нуля и прекращает свободное вытеснение жидкости из полости А в корпус 11 маятника. Маятник 4 возвращается в вертикальное положение за счет вытеснения жидкости из полости А в полость Б через калиброванное отверстие 18. Демпфирование маятника 4 с большой степенью происходит в зоне нечувствительности системы, что прекращает дальнейшее передвижение маятника 4 из вертикального положения прн повышенных скоростях выравнивания. В результате устраняется автоколебание системы с обеспечением устойчивости остова транспортного средства. При вертикальном положении маятника 4 золотник трехпозиционного четырехходового распределителя 3 занимает нейтральное положение, прекращается работа исполнительных цилиндров 7 и 8 и остов без автоколебаний занимает вертикальное положение. Таким образом, маятник в зоне нечувствительности системы находится в большой степени демпфирования, а после выхода из нее он смещается с малой степенью демпфирования и становится свободно навешенным физическим маятником. В результате этого во время выравнивания остова скорость свободно навешенного физического маятника не меньше угловой скорости продольной плоскости остова. Поэтому продольная плоскость остова и маятник синхронно, без отставания во времени, возвращаются в исходное нейтральное положение, что способствует повышению скорости выравнивания остова с исключением автоколебаний. С достижением быстродействия системы и скорости выравнивания остова обеспечивается уменьшение угловой динамической ошибки системы и повышается скорость передвижения транспортного средства, способствующая повышению производительности технологических процессов. Формула изобретения Стабилизатор положения остова транспортного средства, содержащий монтируемый на остове маятниковый датчик крена, связанный с золотником распределителя исполнительных цилиндров и с поршнем, расположенным в корпусе гидравлического демпфера, полости которого соединены между собой через дроссельное отверстие, отличающийся тем, что, с целью повышения чувствительности путем создания различной степени демпфирования, поршень и корпус демпфера выполнены с цилиндрическими сопрягающимися поясками, а на поршне вне зоны цилиндрических поясков выполнены продольные ще.тевидные прорези. Источники информации, принятые во внимание при экспертизе
1. Акцептованная заявка Японии № 48-19967, кл. 80 В 324, 18.06.73.
2. Авторское свидетельство СССР NO 204901, кл. В 60G 19/10, 20.10.67 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический стабилизатор крутосклонного транспортного средства | 1979 |
|
SU787191A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1980 |
|
SU948698A1 |
| Автомат-стабилизатор крутосклонногоТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU816801A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1982 |
|
SU1062029A1 |
| Автомат-стабилизатор | 1982 |
|
SU1049271A1 |
| Автомат управления положением остова транспортного средства | 1986 |
|
SU1395528A1 |
| Устройство стабилизации крутосклонного трактора | 1978 |
|
SU716882A1 |
| Крутосклонное колесное транспортное средство | 1988 |
|
SU1593986A1 |
| Транспортное средство для работы на склонах | 1980 |
|
SU939307A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1981 |
|
SU1031802A1 |
/VVl
т
W
