Известен привод шпинделя хонинговального станка, содержащий кинематическую цеиь вращения шпинделя из зубчатых колес и гидроцилиндр для его поступательного движения.
Привод сообщает шпинделю станка вращение в одну сторону с постоянной скоростью, что снижает точность и производительиость хонингования.
Предлагаемый привод отличается от известного тем, что в кинематической цепи вращения шпинделя установлены щарнирный четырехзвенник и соединенный с цим своим солнечным колесом конический дифференциал, второе солнечное колесо которого через зубчатую иередачу связано со щиинделем. Это повышает производительность и качество хонингования путем сообщения хону переменного по направлению и скорости вращения.
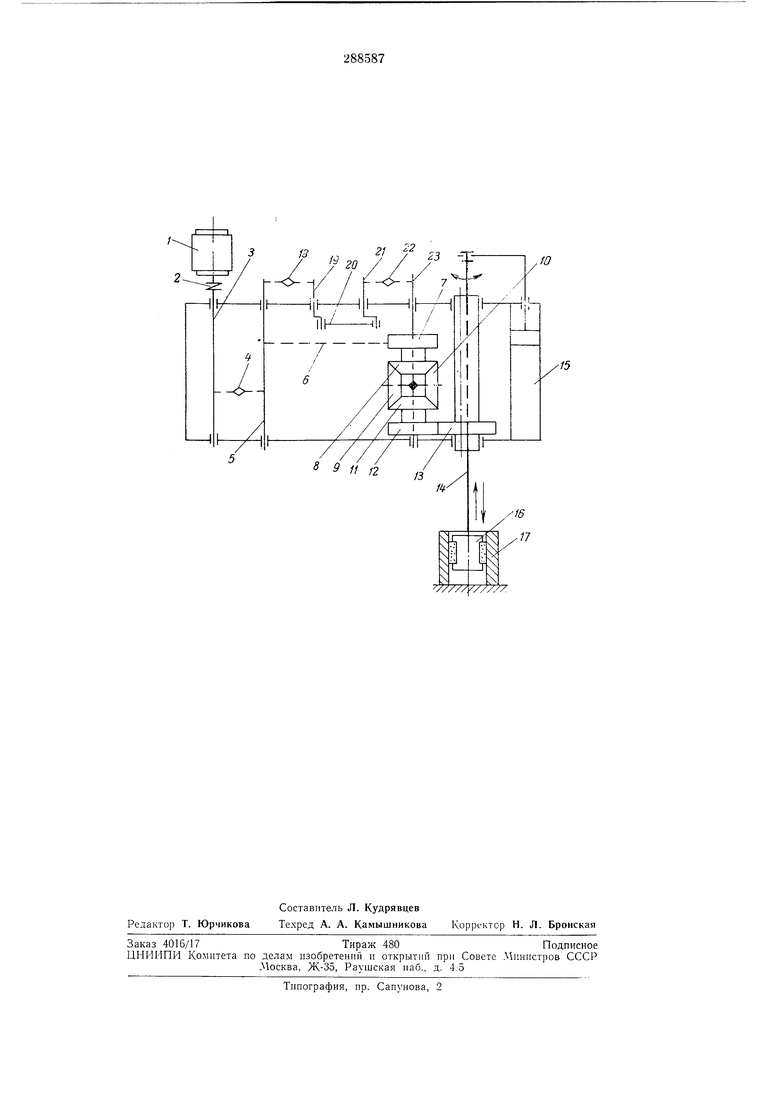
Па чертеже показана кинематическая схема привода.
Двигатель У связан муфтой 2 с валом 3, который кинематической цепью 4 с регулятором скорости соединен с валом 5. Последний соединен кинематической цепью 6 с зубчатым колесом 7, жестко связанным с ведущим колесо.м 8 дифференциала, который состоит из колеса 5, колес 9 и 10 водила и ведомого колеса //. Ведомое колесо дифференциала жестко связано с колесом 12, которое чеоез
зубчатое колесо 13 соединено со шпинделем 14 станка. Шпиндель находится внутри гильзы, жестко связанной с колесом 13, и .может, вращаясь вместе с ней, соверщать прямолинейные движения вдоль ее осп.
Верхний конец шпинделя соединен со штоком гидроцилиндра 15, к нижнему его концу крепится головка 16, которая хонингует отверстие детали 17.
Вал 5 связан через кинематическую цепь с регулятором 18 вращения с кривошипным валом 19, который щатуном 20 соединен с кривощппным валом 21. Валы 19 и 21 и шатун 20 образуют колебательный механизм в виде щарнирного четырехзвенника, причем радиус кривощппа вала 21 больше радиуса кривошипа вала 19.
Крнвощииный вал 21 соединен кинематической цепью с регулятором 22 вращения с валом 23, который является одновременно водплом дифференциала. Вал 23 жестко связан с осями колес водила, которые свободно вращаются на этих осях. Зубчатые колеса Л 8 и 11, 12 также свободно поворачиваются относительно вала 23.
Устройство работает следующим образом. регулятором может быть обычная коробка скоростей. От вала 5 вращение передается через кинематическую цепь 6 и зубчатые колеса 7, 8, 9, 10, 11, 12 и 13 на шпиндель 14. Последний движется вдоль своей оси прямолинейно с постоянной скоростью вверх и вниз при помощи цилиндра 15. Если скорость вращения вала 23 равна нулю, то шпиндель вращается с постоянной скоростью, величина которой настраивается регулятором кинематической цеии 4. При этом каждая точка шпинделя, а вместе с ней и режущие кромки хонинговальной головки будет описывать винтовую линию, на поверхности обрабатываемой детали. Для того чтобы превратить прямолинейный характер движения режущей кромки в волнообразный при вращении вала 5, через кинематическую цепь с регулятором 18, колебательный механизм и кинематическую цепь с регулятором 22 валу 23 сообщается возвратно-вращательное движение. Оно складывается дифференциалом с вращением, которое подводится к колесу 8 от вала 5 через кинематическую цепь 6 и колесо 7. Волнообразный характер движения зерен способствует лучшему самозатачиванию режущих кромок, увеличивает число кромок, участвующих в резании, и уменьшает длину стружки. Количество вала этого движения за один оборот шпинделя зависит от частоты возвратно-вращательного движения и равно числу оборотов кривошипного вала 19. Число оборотов последнего настраивается регулятором 18 скорости вращения кииематической цепи, в качестве которого в простейшем случае могут быть использованы, например, два сменных зубчатых колеса. Амплитуда волнообразного движения зависит от размаха возвратно-вращательного движения, величина которого зависит от соотношения радиусов кривошипов валов 19 и 21 и от передаточного отношения кинематической цепи с регулятором. 22. Величина амплитуды настраивается регулятором 22 скорости вращения, в качестве которого могут быть применены, например, два сменных зубчатых колеса. В качестве колебательного механизма может быть использован не только шарнирный четырехзвенник, но и другие механизмы, например кулисный механизм, а в качестве дифференциала - не только конический зубчатый дифференциал, но и другие суммирующие механизмы. Предмет изобретения Привод шпинделя хонинговального станка, содержащий кинематическую цеиь вращения щпинделя из зубчатых колес и гидроцнлиндр для его ностуиательного движения, отличающийся тем, что, с целью повыщения производительности и качества хонингования путем сообщения хону переменного по направлению и скорости вращения, в кинематической цепи вращения шпинделя установлены шарнирный четырехзвенник и соединенный с ним своим солиечным колесом конический дифференциал. второе солиечное колесо которого через зуб чатую передачу связано со шпинделем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБОХОНИН ПОВАЛЬНЫЙ СТАНОК | 1970 |
|
SU268870A1 |
| СТАНОК ДЛЯ ОСЕВОГО ХОНИНГОВАНИЯ | 1971 |
|
SU313646A1 |
| Хонинговально-доводочный станок | 1987 |
|
SU1509235A1 |
| ЗУБОХОНИНГОВАЛЬНЫЙ СТАНОК | 1970 |
|
SU279365A1 |
| Хонинговально-доводочный станок | 1984 |
|
SU1209418A1 |
| ХОНИНГОВАЛЬНЫЙ СТАНОК | 2009 |
|
RU2424102C2 |
| СПОСОБ ХОНИНГОВАНИЯ | 1968 |
|
SU217919A1 |
| ХОНИНГОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 1971 |
|
SU295657A1 |
| Механизм разжима брусков хонинговального станка | 2015 |
|
RU2617186C2 |
| Хонинговальный станок | 1971 |
|
SU438524A1 |