(54) МЕХАНИЗМ ФИКСАЦИИ ПРИСПОСОБЛЕНИЙ-СПУТНИКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтоматическая сборочная линия | 1982 |
|
SU1115886A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 1972 |
|
SU331879A1 |
| Устройство для корректировки масс роторов электродвигателей | 1986 |
|
SU1330479A1 |
| Автоматизированная сборочная линия | 1981 |
|
SU1013212A1 |
| Установка для финишной обработки отливок | 1987 |
|
SU1532198A1 |
| Устройство для закрепления приспособления-спутника | 1975 |
|
SU524670A1 |
| Металлорежущий станок | 1990 |
|
SU1830333A1 |
| Металлорежущий станок со сменными шпиндельными головками | 1991 |
|
SU1784443A1 |
| Приспособление-спутник | 1983 |
|
SU1169801A1 |

1
Изобретение относится к станкостроению, преимущественно к автоматическим линиям для сборки узлов.
Известен механизм фиксации при5пособлений-спутников, выполненный в виде прижимной пЛиты с подпружинен ным клином, входящим в паз угольника, и коническим пальцем, обеспечивающим беззазорное прижатие спутника к установочным поверхностям угольника и к.лина pLj .
Однако несмотря на обеспечение беззазорного прижатия спутника к устновочным поверхностям, высокая точность фиксации в направлении транспортирования (особенно повторяемость точности фиксации многих спутников на одном и том же механизме фиксации не может быть обеспечена, так как подпружиненный конус поджимает плиту спутника к подвижному подпружиненному клину ,v который может занимать t a3ное по высоте положение при фиксации различных спутников.
Наиболее близким к изобретению по технической сущности является мехнизм фиксации приспособлений-спутников, содержащий подвижный фиксатор, установленный с возможностью взаимодействия с клиновым блоком, расположенным в центре одной стороны спутника, и стационарные прихваты, расположенные с противоположной стороны и установленные с возможностью взаимодействия с наклонными плоскостями спутника, расположенными по его углам f2} .
Недостатком данного механизма фиксации является его невысокая надежность и точность фиксации вследствие применения в качестве фиксирующих элементов плоскостей, накладывающих лишние связи и исключающих возможность контактов по всем поверхностям одновременно.
Цель изобретения - повышение надежности и точнос,ти фиксации.
Указанная цель достигается тем, ч стационарные прихваты и подвижной фиксатор снабжены коническими роликами, установленными с возможностью взаимодействия с соответствующими поверхностями спутника. Кроме того, клиповый блок выполнен в виде конической призмы.
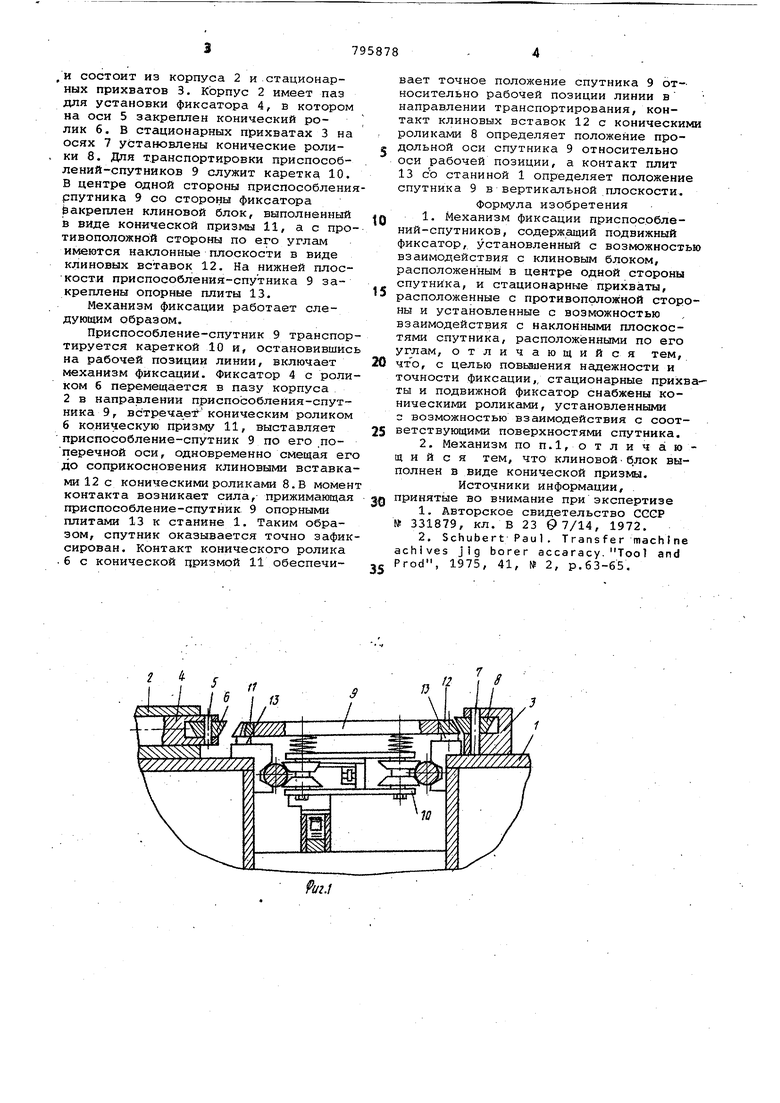
На фиг. 1 изображен механизм фяксации приспособления спутника в разрезе;на фиг. 2 - то же, вид сверх
Механизм фиксации приспособленийспутников закреплен на станине 1
и состоит из корпуса 2 и стационарных прихватов 3. корпус 2 имеет паз для установки фиксатора 4, в котором на оси 5 закреплен конический ролик 6, в стационарных прихватах 3 на осях 7 установлены конические ролики 8, Для транспортировки приспособлений-спутников 9 служит каретка 10 В центре ОДНОЙ стороны приспособления рпутника 9 со стороны фиксатора еакреплен клиновой блок, выполненный в виде конической призмы 11, а с противоположной стороны по его углам имеются наклонные плоскости в виде клиновых вставок 12. На нижней плоскости приспособления-спутника 9 закреплены опорные плиты 13.
Механизм фиксации работает следующим образом.
Приспособление-спутник 9 транспортируется кареткой Ю и, остановившись на рабочей позиции линии, включает механизм фиксации. Фиксатор 4 с роликом 6 перемещается в пазу корпуса 2 в направлении приспособления-спутника 9, встречаетг коническим роликом б коническую призму 11, выставляет приспособление-спутник 9 по его поеречной оси, одновременно смещая его о соприкосновения клиновыми вставками 12 с коническими роликами 8. В момент контакта возникает сила, прижимающая приспособление-спутник 9 опорными плитами 13 к станине 1. Таким образом, спутник оказывается точно зафиксирован. Контакт конического ролика 6 с конической цризмой 11 обеспечивает точное положение спутника 9 относительно рабочей позиции линии в направлении транспортирования, контакт клиновых вставок 12 с коническими роликами 8 определяет положение продольной оси спутника 9 относительно оси рабочей позиции, а контакт плит 13 со станиной 1 определяет положение спутника 9 в вертикальной плоскости.
Формула изобретения 1. Механизм фиксации приспособлений-спутников, содержащий подвижный фиксатор, установленный с возможностью взаимодействия с клиновым блоком расположенным в центре одной стороны - спутника, и стационарные прихваты, расположенные с противоположной стороны и установленные с возможностью взаимодействия с наклонными плоскостями спутника, расположенными по его углам, отличающийся тем, что, с целью повышения надежности и
точности фиксации,, стационарные прихватн и ПОДВИЖНОЙ фиксатор снабжены коническими роликами, установленными возможностью взаимодействия с соот5 ветствующими поверхностями спутника.
Источники информации, принятые во внимание при экспертизе
5 Prod, 1975, 41, № 2, p.63-65
(2
