Изобретение относится к станкостроению и.может быть использовано в металлообрабатывающей промышленности для полной обработки тюбингов.
Цель изобретения - расширение технологических возможностей станка.
Указанная цель достигается тем, что металлорежущий станок содержит участок транспортера, загрузочно-разгруэочное устройство для передачи спутников с деталями между транспортером и станком, включающим станину, на которой закреплены обрабатывающие силовые агрегаты со
шпиндельными головками и поворотный относительно вертикальной оси стол с направляющими для спутников, причем каждый из обрабатывающих силовых агрегатов снабжен приспособлением для закрепления обрабатываемых деталей, выполненным поворотным относительно вертикальной оси, а поворотный йтол снабжен механизмом перемещения спутников на приспособление и транспортер, при этом на каждом спутнике расположен кронштейн с раскрытым снизу П-образным пазом с возможностью захода в него вершин пальцев, при
00
со
о
ы со
О)
этом механизм перемещения спутника с обрабатываемой деталью смонтирован на корпусе поворотного стола со стороны расположения одношпмндельного сверлильного агрегата,напротив транспортера установлен дополнительный силовой агрегат с таким же механизмом перемещения спутника, установленным на корпусе поворотного стола, фрезерный агрегат установлен на каретке силового стола подвижно, снабжен устройством его наклона в плоскости, перпендикулярной направлению движения каретки, и имеет выполненные на корпусе вертикальные направляющие с несущей дополнительной фрезерный агрегат кареткой, приводимой в движение установленным в каретке силового стола основного фрезерного агрегата двуплечим поворотным рычагом, под воздействием на одно из плеч стержня-толкателя контактирующим с закрепленным на основании силового стола копиром, при этом на корпусе поворотного стола установлены приспособления для фиксации и зажима спутников, причем фрезерный агрегат выполненными в корпусе вертикальными отверстиями установлен с зазором на закрепленных в каретке силового стола штырях, пропущенных сквозь попе- речнов отверстие горизонтальных осей поворота, встроенных в этот же корпус, а устройство его наклона образовано закрепленными на последнем цилиндрами, msp- нирно соединенным , штоком - один с кареткой силового стола, а другой с клином зажима корпуса фрезерного агрегата между упорами на каретке, несущей подвижные по выполненным в нем направляющим подводимые опоры с наклонными поверхностями, соответствующими углу наклона корпуса фрезерного агрегата, и приводами их перемещения, при этом механизм перемещения спутника снабжен тягой, образованной штоком силового цилиндра, закрепленного на валу шестерни зубчато-реечной передачи.
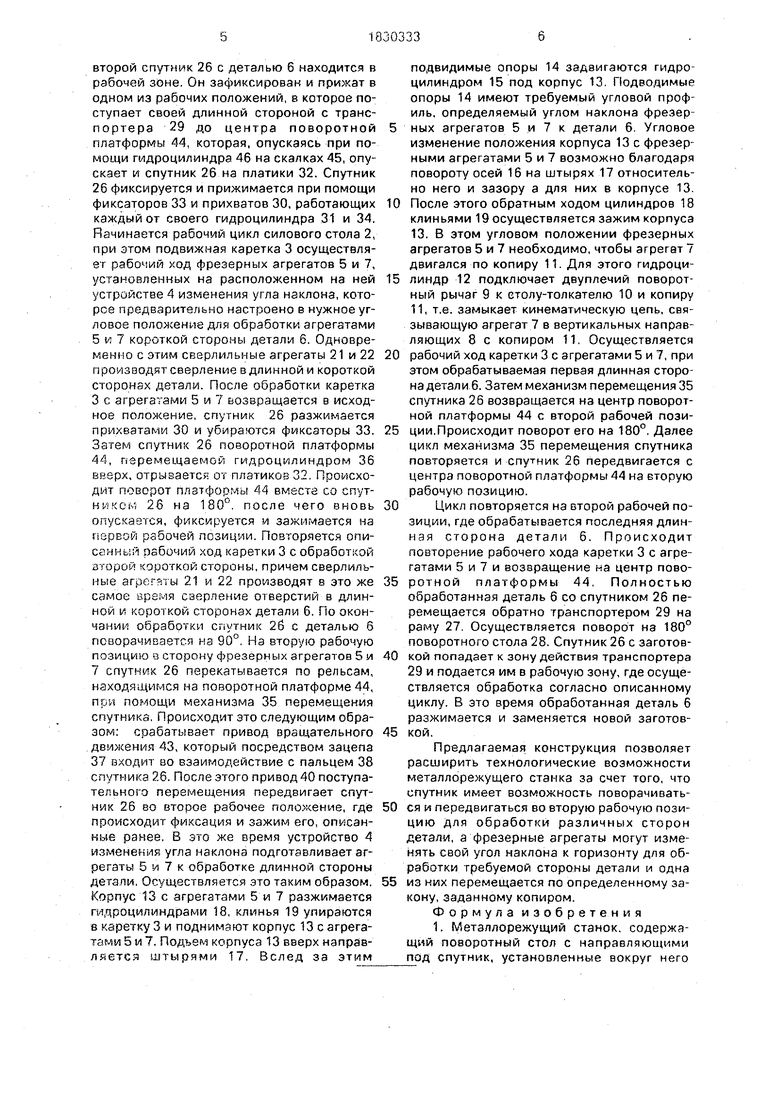
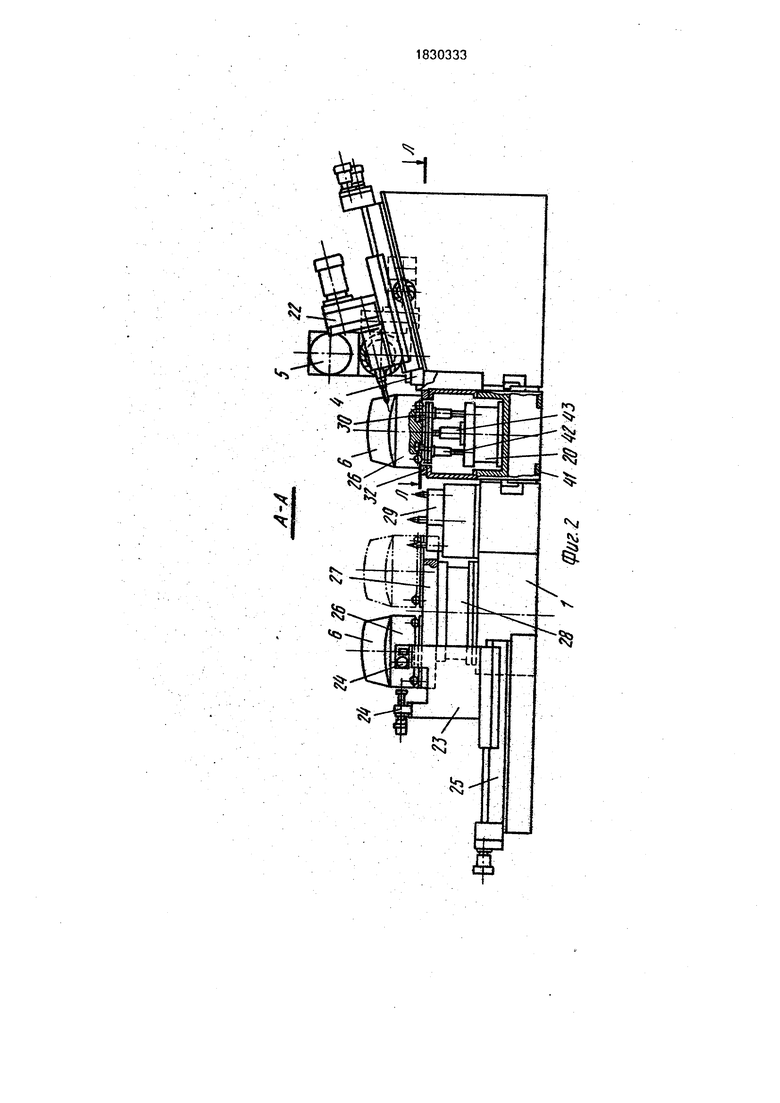
На фиг.1 изображен металлорежущий станок, вид в плане; на фиг,2 - сечение А-А на фиг. 1; на фиг.З - сечение Б-Б на фиг. 1; на фиг.4 - вид по стрелке В на фиг.1; на фиг.5 - то же, во втором угловом положении к детали; на фиг,6 - сечение Г-Г на фиг.4; на фиг.7 - сечение Д-Д на фиг.б; на фиг.8 - сечение Ж-Ж на фиг,4; на фиг,9 - сечение Л-Л на фиг.2; на фиг. 10 - сечение М-М нэ фиг.9; на фиг. 11 - сечение И-И на фиг;3; на фиг. 12 - вид по стрелке К на фиг.З.
Станок содержит станину 1. на которой установлен горизонтальный силовой стол 2 с подвижной кареткой 3. На каретке 3 через устройство изменения угла наклона 4 последовательно в ряд закреплены две фрезерных агрегата, причем первый агрегат 5 установлен на устройстве изменения угла наклона 4 к обрабатываемой детали 6, а
второй агрегат 7 может перемещаться по вертикальным направляющим 8, закрепленным сбоку на корпусе первого агрегата 5. Вертикальное движение агрегата 7 по направляющим осуществляется при рабочем
0 ходе каретки 3 по траектории связанного с ней посредством двуплечего поворотного рычага 9 и стержня-толкателя 10 копира 11. Агрегат 7 имеет возможность отключаться от копира 11 при помощи гидроцилиндра 12.
5 Устройство изменения угла наклона 4 имеет корпус 13,подводимые опоры 14 с гидроцилиндром 15 их перемещения, поворотные оси 16 на штырях 17 в зазоре а корпуса 13, а также гидроцилиндры 18 для подьема м
0 зажима посредством клина 19 корпуса 13 с расположенными на нем агрегатами 5 и 7 в одном из двух угловых положений. Кроме того, на станине 1 вокруг поворотного стола 20 под углом 90й друг к другу установлены
5 два сверлильных агрегата 21 и 22. С торца станины 1 станок имеет загрузочно-разгру- зочную станцию 23 с механизмами зажима и разжима 25, находящимися на подкатном силовом столе 25. Детали 6 устанавливают0
ся и закрепляются на этой станции на спутнике 26. Транспортировка спутника 26 с деталью 6 в рабочую зону с загрузочно-раз- грузочной станции 23 и обратно осуществляется при помощи рамы 27, находящейся
5 на поворотном столе 28, и транспортере 29. Для установки, фиксации и закрепления спутника 26 на рабочей позиции в одном из двух рабочих положений предусмотрены прихваты 30 с приводом в виде гидроцилин0 драЗ 1, зажимающие спутнике 26 на платики 32, и фиксаторы 33 с гидроцилиндром 34. Для перемещения спутника 26 в сторону фрезерных агрегатов 5 и 7 предусмотрен механизм 35. Перемещение спутника 26
5 осуществляется на рельсах 36, на механизме 35 для этой цели имеется зацеп 37, а на спутнике 26 - палец 38, Зацеп 37 прикреплен к тяге 39 механизма поступательного перемещения 40, который установлен на
0 валу 41 зубчато-реечной передачи 42 привода 43 вращательного движения. Для поворота спутника 26 с деталью 6 для обработки со всех четырех сторон имеется поворотная платформа 44, перемещаемая вверх-вниз
5 при помощи скалок 45 и гидроцилиндра 46, закрепленных на поворотном столе 20.
Станок работает следующим образом. Обрабатываемая деталь 6 устанавливается в спутник 26 на станции загрузки 23 и зажимается механизмом зажима 24. В это время
второй спутник 26 с деталью 6 находится в рабочей зоне. Он зафиксирован и прижат в одном из рабочих положений, в которое поступает своей длинной стороной с транспортера 29 до центра поворотной платформы 44, которая, опускаясь при помощи гидроцилиндра 46 на скалках 45, опускает и спутник 26 на платики 32. Спутник 26 фиксируется и прижимается при помощи фиксаторов 33 и прихватов 30, работающих каждый от своего гидроцилиндра 31 и 34. Начинается рабочий цикл силового стола 2, при этом подвижная каретка 3 осуществляет рабочий ход фрезерных агрегатов 5 и 7, установленных на расположенном на ней устройстве 4 изменения угла наклона, которое предварительно настроено в нужное угловое положение для обработки агрегатами 5 и 7 короткой стороны детали 6. Одновременно с этим сверлильные агрегаты 21 и 22 производят сверление в длин ной и короткой сторонах детали. После обработки каретка 3 с агрегатами 5 и 7 возвращается в исходное положение, спутник 26 разжимается прихватами 30 и убираются фиксаторы 33. Затем спутник 26 поворотной платформы 44, перемещаемой гидроцилиндром 36 вверх, отрывается от платиков 32. Происходит поворот платформы 44 вместе со спутником 26 на 180°. после чего вновь опускается, фиксируется и зажимается на первой рабочей позиции. Повторяется описанный рабочий ход каретки 3 с обработкой второй короткой стороны, причем сверлильные агрегаты 21 и 22 производят в это же самое время саерление отверстий в длинной v, короткой сторонах детали 6. По окончании обработки спутник 2б с деталью 6 поворачивается на 90°. На вторую рабочую позицию в сторону фрезерных агрегатов 5 и 7 спутник 26 перекатывается по рельсам, находящимся на поворотной платформе 44, при помощи механизма 35 перемещения спутника. Происходит это следующим образом: срабатывает привод вращательного движения 43, который посредством зацепа 37 входит во взаимодействие с пальцем 38 спутника 26. После этого привод 40 поступательного перемещения передвигает спутник 2-6 во второе рабочее положение, где происходит фиксация и зажим его, описанные ранее. В это же время устройство 4 изменения угла наклона подготавливает агрегаты 5 и 7 к обработке длинной стороны детали. Осуществляется это таким образом. Корпус 13 с агрегатами 5 и 7 разжимается плдроцияиндрами 18, клинья 19 упираются в каретку 3 и поднимают корпус 13 с агрегатами 5 и 7. Подъем корпуса 13 вверх направ- ляется штырями 17. Вслед за этим
подвидимые опоры 14 задвигаются гидроцилиндром 15 под корпус 13. Подводимые опоры 14 имеют требуемый угловой профиль, определяемый углом наклона фреэер- 5 ных агрегатов 5 и 7 к детали 6. Угловое изменение положения корпуса 13 с фрезерными агрегатами 5 и 7 возможно благодаря повороту осей 16 на штырях 17 относительно него и зазору а для них в корпусе 13.
0 После этого обратным ходом цилиндров 18 клиньями 19 осуществляется зажим корпуса 13. В этом угловом положении фрезерных агрегатов 5 и 7 необходимо, чтобы агрегат 7 двигался по копиру 11. Для этого гидррци5 линдр 12 подключает двуплечий поворотный рычаг 9 к столу-толкателю 10 и копиру 11, т.е. замыкает кинематическую цепь, связывающую агрегат 7 в вертикальных направляющих 8 с копиром 11. Осуществляется
0 рабочий ход каретки 3 с агрегатами 5 и 7, при этом обрабатываемая первая длинная сторона детали 6. Затем механизм перемещения 35 спутника 26 возвращается на центр поворотной платформы 44 с второй рабочей пози5 ции.Происходит поворот его на 180°. Далее цикл механизма 35 перемещения спутника повторяется и спутник 26 передвигается с центра поворотной платформы 44 на вторую рабочую позицию.
0Цикл повторяется на второй рабочей позиции, где обрабатывается последняя длин- ная сторона детали 6. Происходит повторение рабочего хода каретки 3 с агрегатами 5 и 7 и возвращение на центр пово5 ротной платформы 44. Полностью обработанная деталь 6 со спутником 26 перемещается обратно транспортером 29 на раму 27. Осуществляется поворот на 180° поворотного стола 28. Спутник 26 с заготов0 кой попадает к зону действия транспортера 29 и подается им в рабочую зону, где осуществляется обработка согласно описанному циклу. В это время обработанная деталь 6 разжимается и заменяется новой заготов5 кой.
Предлагаемая конструкция позволяет расширить технологические возможности металлорежущего станка за счет того, что спутник имеет возможность поворачивать0 ся и передвигаться во вторую рабочую позицию Для обработки различных сторон детали, а фрезерные агрегаты могут изменять свой угол наклона к горизонту для обработки требуемой стороны детали и одна
5 из них перемещается по определенному закону, заданному копиром.
Формула изобретения 1. Металлорежущий станок, содержащий поворотный стоя с направляющими под спутник, установленные вокруг него
транспортер с аналогичными направляющими и диаметрально противоположно размещенные силовые столы с фрезерным агрегатом на одном из них и со сверлильным на другом, и механизм перемещения спутника, выполненный в виде подвижной посредством зубчато-реечной передачи тяги с зацепом на конце для взаимодействия с ответным элементом на спутнике, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительным силовым столом со сверлильным агрегатом, установленным около поворотного стола напротив транспортера, дополнительным механизмом перемещения спутника и приспособлениями для фиксации и зажима спутника, а фрезерный агрегат установлен на дополнительно введенной каретке с возможностью перемещения относительно поворотного стола и снабжен устройство его наклона в плоскости, перпендикулярной направлению перемещения агрегата, и дополнительным фрезерным агрегатом с приводом его перемещения, при этом основной механизм перемещения спутника установлена на корпусе поворотного стола напротив силового стола со сверлильным агрегатом, а дополнительный механизм перемещения спутника установлен на корпусе поворотного стола напротив дополнительного силового стола со сверлильным агрегатом, причем тяга каждого из механизмов перемещения выполнена в виде штока силового цилиндра, закрепленного на валу зубчатого колеса зубчато-реечной передачи, при этом дополнительный фрезерный агрегат установлен на дополнительно введенных вертикальных направляющих, выполненных на корпусе основного фрезерного агрегата с возможностью перемещения по ним, а привод его
перемещения выполнен в виде двуплечего поворотного рычага, стержня-толкателя и копира, причем двуплечий поворотный рычаг установлен в корпусе основного фрезерного агрегата с возможностью взаимодействия одним своим плечом с корпусом дополнительного фрезерного агрегата, а другим - со стержнем-толкателем, размещенным с возможностью взаимодействия другим своим концом с копиром, закрепленным на силовом столе, кроме того приспособления для фиксации и зажима спутников закреплены на. корпусе поворотного стола.
2. Станок по п.1,отличающийся тем, что фрезерный агрегат снабжен клином зажима его корпуса и горизонтальными осями поворота, размещенными в корпусе устройства наклона, в которых выполнены
поперечные вертикальные отверстия, а в корпусе основного фрезерного агрегата также выполнены вертикальные отверстия, при этом каретка снабжена штырями, каждый из которых закреплен с возможностью одновременного размещения в поперечном отверстии горизонтальной оси и в вертикальном отверстии, причем в последнем штырь размещен с зазором, кроме того, на каретке выполнены дополнительные направляющие, а
устройство, наклона выполнено s виде силовых цилиндров, закрепленных на его корпусе, шток одного из которых шзрнирно закреплен на каретке, а шток другого - н-з клине зажима корпуса фрезерного агрегата, и подводимых
опор с наклонными поверхностями и с приводами их перемещения, причем подводимые опоры установлены на дополнительных направляющих каретки с возможностью перемещения и размещения их под корпусом
фрезерного агрегата.
5j t
u
фиг.З виде

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для производства составных стеновых блоков | 1980 |
|
SU944943A1 |
| Агрегат для обработки деревянных опор линий электропередач | 1981 |
|
SU933458A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Полуавтоматическая сборочная линия | 1982 |
|
SU1115886A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Агрегатный станок | 1982 |
|
SU1042957A1 |
| Агрегат для обработки деревянныхдЕТАлЕй ОпОР лиНий элЕКТРОпЕРЕдАч | 1979 |
|
SU812575A1 |
| Многоцелевой станок с ЧПУ | 1983 |
|
SU1166965A1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1994 |
|
RU2064860C1 |
| Гибкий производственный модуль автоматической линии | 1985 |
|
SU1456297A1 |




Использование: станкостроение, в частности многоцелевые агрегатные станки. Сущность, изобретения: металлорежущий станок содержит поворотный стол с направляющим ,-;, установленные вокруг него транспортер с таким же направляющими и диаметрально противоположно расположенные силовые столы с фрезерными агрегатами нз одном из них и све-рлильными на другом и механизмом перемещения спутника с обрабатываемой деталью, выполненный в виде тяги с зацепом на конце, сцепляемой с ответным элементом на спутнике. Механизм перемещения спутника смонтирован на корпусе поворотного стола, а его тяга образована штоком силового цилиндра. Напротив транспортера установлен дополнительный силовой стол со сверлильным агрегатом и таким же механизмом перемещения спутника на корпусе поворотного стола. Фрезерный агрегат установлен на каретке силового стола подвижно, снабжен устройством его наклона и имеет выполненные нз своем корпусе вертикальные направ- ляющие с кареткой для другого агрегата. В каретке силового стола установлен двуплечий поворотный рычаг, контактирующий с закрепленным на основании копиром, а на корпусе поворотного стола установлено приспособление для фиксации и зажима спутника. 1 з.п. ф-лы, 12 ил.
«Us
§
g
Ql гпФ
Ј
rr - пЈ ГП iL U-M
2Ј 0Ј tЈ
6 V(b 9Q
0Ј
9Ј
If-If
tЈCOC8l
Лриспасодление - слутмж В центре -, f7oSa,oo.m, -/offi} смела
/Ipucf ac0ffjrext/e - спг/тмж сдЗмут
к фрезерным Зодхям
Ml/ К 3ff fl /3QV-
ному с/по/ //
| Авторское свидетельство СССР № 1059972, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
