Изобретение относится к машиностроению и может быть использовано в автоматической балансировке роторов электродвигателей.
Цель изобретения - повышение производительности корректировки роторов за счет сокращения и совмещения вспомогательных движений.
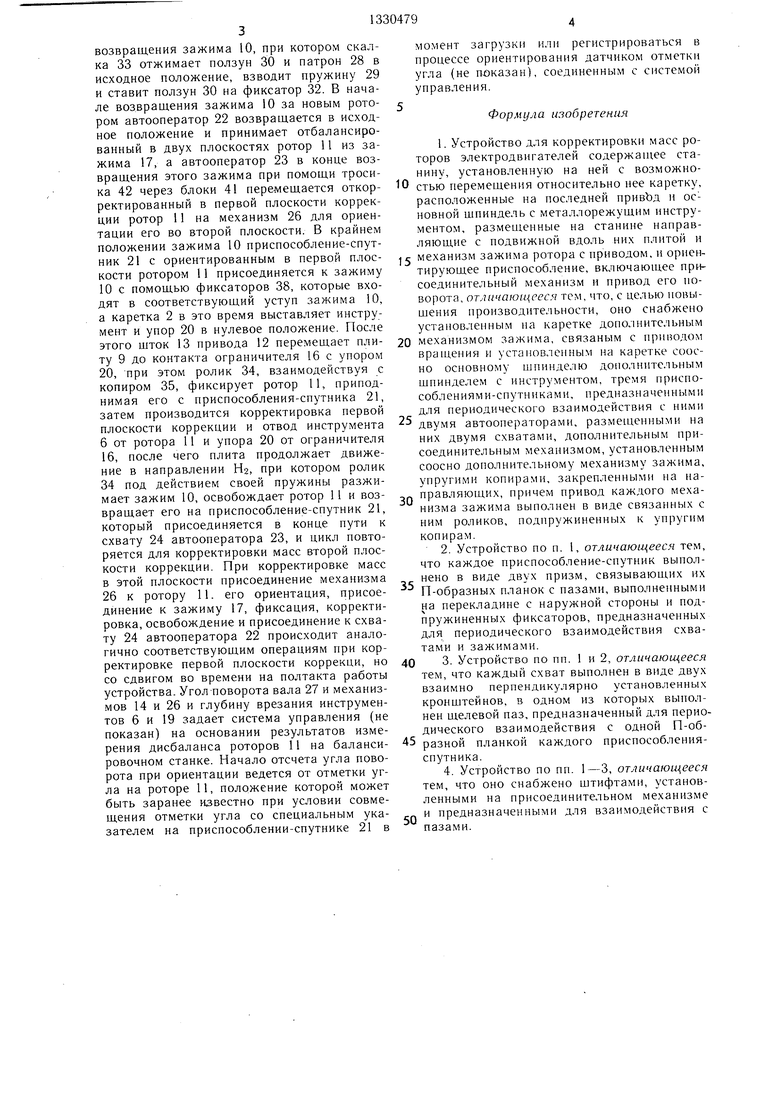
На фиг. 1 изображено предлагаемое устройство, вид сверху; на фиг. 2 - разрез на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - приспособление-спутник (разрез В-В на фиг. 3).
Устройство содержит станину 1, перемещающуюся по ней каретку 2, связанную с двигателем 3 через ходовой винт 4, установленные на каретке основной щпиндель 5 с металлорежущим инструментом 6 (фрезой) и приводом 7 их вращения, жестко связанные со станиной перпендикулярные движению каретки 2 направляющие 8, по которым перемещается подвижная плита 9 и зажим 10, привод зажима ротора М, привод 12 со щтоком 13, жестко связанным с плитой 9, и ориентирующее приспособление, включающее присоединительный механизм 14 и привод 15 его поворота. На плите закреплены ограничитель 16 его перемещения и дополнительный зажим 17. На каретке установлен соосно основному щпинделю дополнительный щпиндель 18 и инструмент 19 связанные с приводом 7. На той же каретке установлен упор 20, предназначенный для взаимодействия с ограничителем 16. Кроме того устройство снабжено тремя приспособлениями-спутниками 21, предназначенными для транспортировки роторов и двумя подпружиненными автооператорами 22 и 23 со схватами 24 для приспособлений спутников, выполненных с возможностью перемещения по щтангам 25, укрепленным на станине. Дополнительный присоединительный механизм 26 установлен на станине и выполнен в виде связанного с приводом 15 поворота и параллельного направляющим щлицевого вала 27, консольно размещенного на валу подпружиненного зажимного патрона 28, предназначенного для фиксации цапфы ротора при взаимодействии с пружиной 29, и связанного с зажимным патроном ползуна 30 со щтифта- ми 31 и фиксатором 32, выполненными с возможностью взаимодействия с .приспособлением-спутником и скалкой 33, закрепленной на плите. Приводы зажима ротора 11 выполнены в виде связанных с ними подпружиненных роликов 34, подпружиненных к упругим копирам 35, закрепленным на направляющих. Приспособления-спутники, выполнены в виде прямоугольной рамки, образованной из двух П-образных планок 36, соединяющих призмы 37. Перекладины П-образных планок с наружной стороны имеют пазы под щтифты и подпружиненные фиксаторы 38 для периодического взаимодействия со схватами и зажимами. Схват
0
5
0
5
0
5
0
5
0
5
выполнен в виде параллельных плоскости направляющих и перпендикулярных друг другу кронщтейнов 39 и 40, первый из которых имеет щелевой паз, предназначенный для периодического взаимодействия с П-образной планкой. Кинематическая связь зажимов с соответствующими автооператорами выполнена в виде соединяющих их через блоки 41 стальных тросиков 42. Длина тросиков обеспечивает их натяжение только при расположении связанных с ними зажимов между инструментом и позицией выгрузки.
Устройство работает следующим образом.
Ротор 11 загружается,на устройство во время остановки плиты 9 в положении корректировки масс первой плоскости коррекции. Остановка обеспечивается путем предварительного выдвижения упора 20 в процессе выставки инструмента 6 на нулевую глубину врезания и перемещения плиты 9 приводом 12 через щток 13 в направлении HI до контакта ограничителя 16 с упором 20. Ограничитель 16 перед началом работы перемещается по плите 9 и фиксируется, а его длина регулируется таким образом, что при контакте одной его стороны с упором 20 плита 9 останавливается первой плоскостью коррекции ротора над инструментом 6, а при контакте другой его стороны с этим упором при обратном ходе плиты она останавливается второй плоскостью коррекции ротора над инструментом 19. После загрузки очередного ротора 11 и завершения корректировки масс в первой плоскости коррекции предыдущего ротора упор 20 отводится и плита 9 продолжает движение в направлении HI, в процессе которого тросик 42, присоединенный к зажиму 10, отводит автооператор 22 с загруженным в приспособлении- спутнике 21 ротором 11 в противоположное положение, взводя при этом пружины на щтангах 25. В процессе загрузки очередного ротора 11 автооператор 23 находился на полпути к своему крайнему положению, поэтому после отвода упора 20 он продолжает движение в направлении Hi, завер- щает его под действием пружин и принимает приспособление-спутник 21 с откорректированным в первой плоскости коррекции ро тором 11 в схват 24, при этом подпру жиненный фиксатор 38 входит в уступ на кронщтейне 39, чтобы удержать приспособление спутник в схвате при вводе зажима 10 В этот момент приспособление-спутник 21 с вновь загруженным ротором 11 подводится к механизму 14 и отжимает фиксатор 32 Под действием пружины 29 патрон 28 перемещается по валу 27 и зажимает цапфу ротора, а связанный с патроном 28 ползун 30 вводит свои штифты 31 в пазы планок 36 приспособления-спутника 21, после чего начинается процесс ориентирования ротора путем поворота вала 27 с помощью привода 15. Ориентирование заканчивается до
возвращения зажима 10, при котором скалка 33 отжимает ползун 30 и патрон 28 в исходное положение, взводит пружину 29 и ставит ползун 30 на фиксатор 32. В начале возвращения зажима 10 за новым ротором автооператор 22 возвращается в исходное положение и принимает отбалансированный в двух плоскостях ротор 11 из зажима 17, а автооператор 23 в конце возвращения этого зажима при помощи троси
момент загрузки или регистрироваться в процессе ориентирования датчиком отметки угла (не пеказан), соединенным с системой управления.
Формула изобретения
1. Устройство для корректировки масс роторов электродвигателей содержащее станину, установленную на ней с возможнока 42 через блоки 41 перемещается откор- Ю стью перемещения относительно нее каретку, ректированный в первой плоскости коррекции ротор 11 на механизм 26 для ориентации его во второй плоскости. В крайнем положении зажима 10 приспособление-спутник 21 с ориентированным в первой плоскости ротором 11 присоединяется к зажиму 10 с помощью фиксаторов 38, которые входят в соответствующий уступ зажима 10, а каретка 2 в это время выставляет инструмент и упор 20 в нулевое положение. После
расположенные на последней привЪд и основной шпиндель с металлорежущим инструментом, размещенные на станине направляющие с подвижной вдоль них плитой и 5 механизм зажима ротора с приводом, и ориентирующее приспособление, включаюп ее присоединительный механизм и привод его поворота, отличающееся тем, что, с целью повы- щения производительности, оно снабжено установленным на каретке дополнительным
этого шток 13 привода 12 перемещает пли- 20 механизмом зажима, связаным с приводом
ту 9 до контакта ограничителя 16 с упором 20, при этом ролик 34, взаимодействуя с копиром 35, фиксирует ротор 11, приподнимая его с приспособления-спутника 21, затем производится корректировка первой плоскости коррекции и отвод инструмента 6 от ротора И и упора 20 от ограничителя 16, после чего плита продолжает движение в направлении Нг, при котором ролик 34 под действием своей пружины разжимает зажим 10, освобождает ротор 11 и возвращает его на приспособление-спутник 21, который присоединяется в конце пути к схвату 24 автооператора 23, и цикл повторяется для корректировки масс второй плоскости коррекции. При корректировке масс в этой плоскости присоединение механизма 26 к ротору 11. его ориентация, присоединение к зажиму 17, фиксация, корректировка, освобождение и присоединение к схвату 24 автооператора 22 происходит аналогично соответствующим операциям при корректировке первой плоскости коррекци, но со сдвигом во времени на полтакта работы устройства. Угол поворота вала 27 и механизмов 14 и 26 и глубину врезания инструментов 6 и 19 задает система управления (не показан) на основании результатов изме25
врапхения и установленным на каретке соос- но основному шпинделю дополнительным шпинд.елем с инструментом, тремя приспособлениями-спутниками, предназначенными для периодического взаимодействия с ними двумя автооператорами, размещенными на них двумя схватами, дополнительным присоединительным механизмом, установленным соосно дополнительному механизму зажима, упругими копирами, закрепленными на на-,,« правляющих, причем привод каждого механизма зажима выполнен в виде связанных с ним роликов, подпружиненных к упругим копирам.
2. Устройство по п. 1, отличающееся тем, что каждое приспособление-спутник выполнено в виде двух призм, связывающих их П-образных планок с пазами, выполненными на перекладине с наружной стороны и подпружиненных фиксаторов, предназначенных для периодического взаимодействия схватами и зажимами.
40 3. Устройство по пп. 1 и 2, отличающееся тем, что каждый схват выполнен в виде двух взаимно перпендикулярно установленных кронщтейнов, в одном из которых выполнен щелевой паз, предназначенный для периодического взаимодействия с одной П-об35
рения дисбаланса роторов 11 на баланси- 45 разной планкой каждого приспособленияровочном станке. Начало отсчета угла пово- спутника.
4. Устройство по пп. 1-3, отличающееся тем, что оно снабжено штифтами, установленными на присоединительном механизме
рота при ориентации ведется от отметки угла на роторе 11, положение которой может быть заранее известно при условии совмещения отметки угла со специальным указателем на приспособлении-спутнике 21 в
50
и предназначенными для взаимодействия с пазами.
момент загрузки или регистрироваться в процессе ориентирования датчиком отметки угла (не пеказан), соединенным с системой управления.
Формула изобретения
1. Устройство для корректировки масс роторов электродвигателей содержащее станину, установленную на ней с возможностью перемещения относительно нее каретку,
стью перемещения относительно нее каретку,
расположенные на последней привЪд и основной шпиндель с металлорежущим инструментом, размещенные на станине направляющие с подвижной вдоль них плитой и механизм зажима ротора с приводом, и ориентирующее приспособление, включаюп ее присоединительный механизм и привод его поворота, отличающееся тем, что, с целью повы- щения производительности, оно снабжено установленным на каретке дополнительным
5
врапхения и установленным на каретке соос- но основному шпинделю дополнительным шпинд.елем с инструментом, тремя приспособлениями-спутниками, предназначенными для периодического взаимодействия с ними двумя автооператорами, размещенными на них двумя схватами, дополнительным присоединительным механизмом, установленным соосно дополнительному механизму зажима, упругими копирами, закрепленными на на,,« правляющих, причем привод каждого механизма зажима выполнен в виде связанных с ним роликов, подпружиненных к упругим копирам.
2. Устройство по п. 1, отличающееся тем, что каждое приспособление-спутник выполнено в виде двух призм, связывающих их П-образных планок с пазами, выполненными на перекладине с наружной стороны и подпружиненных фиксаторов, предназначенных для периодического взаимодействия схватами и зажимами.
0 3. Устройство по пп. 1 и 2, отличающееся тем, что каждый схват выполнен в виде двух взаимно перпендикулярно установленных кронщтейнов, в одном из которых выполнен щелевой паз, предназначенный для периодического взаимодействия с одной П-об5
5 разной планкой каждого приспособления50
и предназначенными для взаимодействия с пазами.
10
А-А 76 ч 7 J
JL, 2f
фиг. г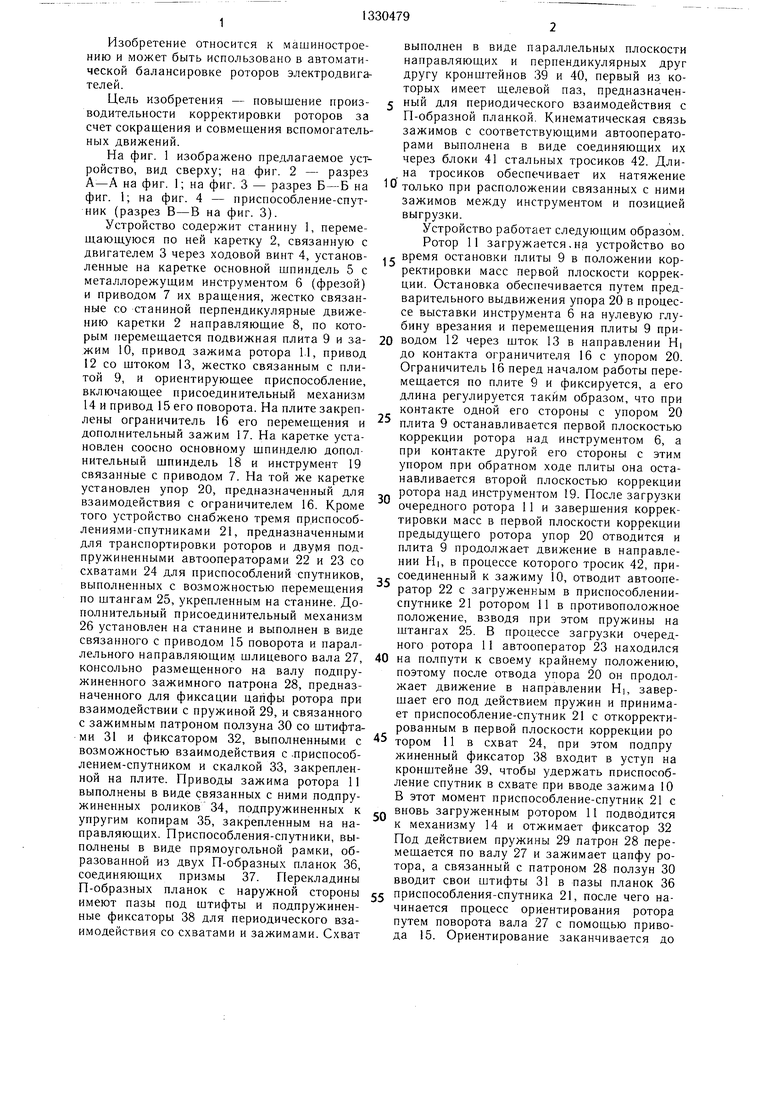
| название | год | авторы | номер документа |
|---|---|---|---|
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Устройство автоматической смены инструмента | 1989 |
|
SU1668095A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Гибкий производственный модуль | 1989 |
|
SU1754421A2 |
| Автооператор | 1988 |
|
SU1521576A1 |
| Агрегатный станок | 1986 |
|
SU1399078A1 |
| Полуавтоматическая сборочная линия | 1982 |
|
SU1115886A1 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение нроизводительности балансировки роторов электродвигателей. На станине 1 установлена каретка с основным и дополнительным шпинделями 5 и 18, и инструмен2В i тами 6 и 19, а также установлены направляющие 8, по которым перемеш,ается плита 9 от привода 12. На станине установлены два механизма зажима ротора в виде роликов 34, подпружиненных к упругим копирам 35, и два ориентируюш.их приспособления, состоянлие из присоединительного механизма 14 и привода 15. Ротор 11 транспортируется тремя приспособлениями-спутниками 21, собранными каждое из двух призм, связываюш.их их П-образных планок с пазами на наружной стороне, перекладин и подпружиненных фиксаторов. Приспособления-спутники перемеш,аются автооператорами со схватами в виде двух взаимно перпендикулярных кронштейнов, в одном из которых выполнен ш.елевой паз для базирования приспособления. При ориентировании приспособление фиксируется штифтами 31, установленными на присоединительном механизме. 3 з.п. ф-лы, 4 ил. «о (Л ОО САЭ О 4 ) Z9 г „15 сриг.1
25
5-6 21 0 39
сриг.З
5-8
J8
фиг А
| Устройство к балансировочному станку | 1973 |
|
SU458726A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект HOFMANN | |||
| Auswuchten in der Elektro-Industrie, 230, 100, О, с | |||
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
