Изобретение относится к весоизмерительной технике и может быть использовано для непрерывного взвеши- вания сыпучих грузов, транспортируемых ленточными транспортерами в горной, металлургической и других отрасгях промышленности.
Цегью изобретения является повы- шение точности взвешивания и упрощение конструкции весов.
На фиг.1 изображены схематично автоматические конвейерные весы; на
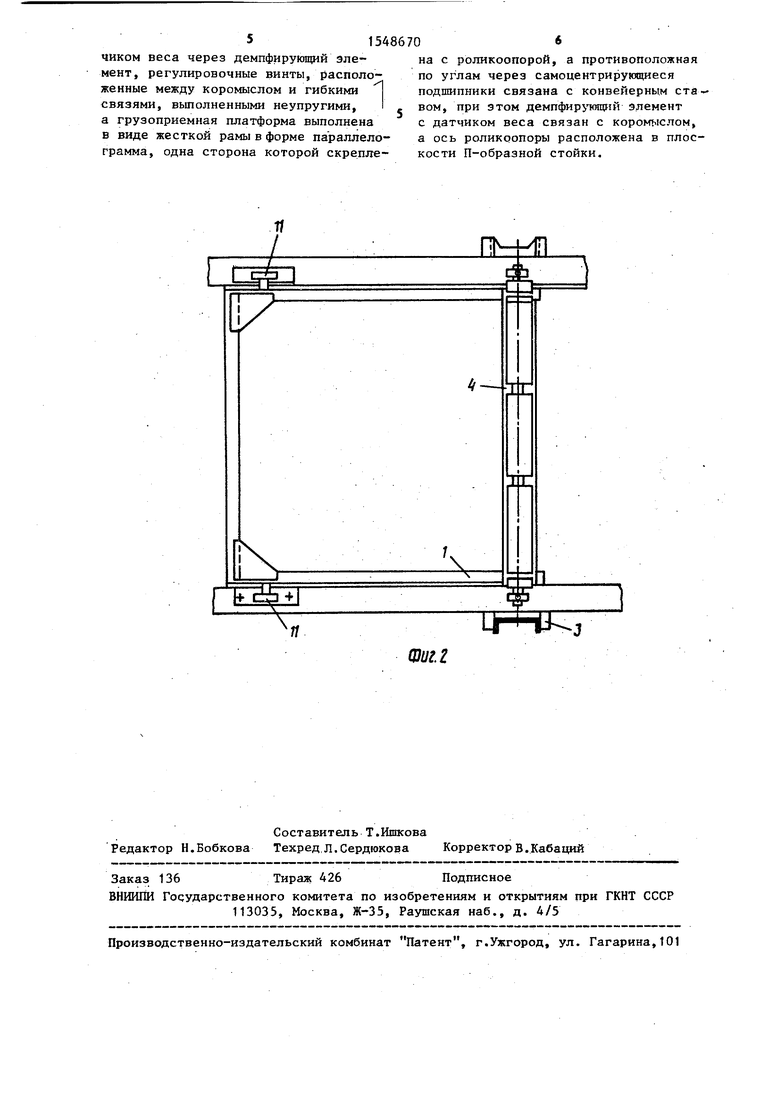
фиг с2 - то же, план.
Конвейерные весы содержат грузо- приемную платформу 1 в виде жесткой рамы параллелограмма, конвейерный став 2 с конвейерной лентой, П-образную стойку 3, роликоопору 4, грузоприемный узел 5 с датчиком 6 ве са и демпфирующим элементом 7, коромысло 8 с регулировочными винтами 9 на концах, неупругие гибкие связи 10, самоцентрирующиеся подшипни- ки 11, регулмровочно-упорные винты 12.
Весы работают следующим образом.
Нагруженная взвешиваемым матери- алом конвейерная лента воздействует на роликоопору 4 грузоприемной платформы 1, Так как грузоприемная платформа 1 приподнята над регулировоч- но-упорными винтами 12 на 5-10 мм при помощи регулировочных винтов 9, то усилие, воздействующее на роликоопору 4 через неупругие гибкие связи 10 и коромысло 8, передается на грузоприемный узел 5 и на датчик 6 веса. Выходной сигнал с датчика веса поступает на регистрирующее устройство (не показано), которое осуществляет обработку сигнала по за0
5
0
данному алгоритму и регистрирует интегральную и мгновенную нагрузки.
Сдвигающие силы, вызываемые перемещением конвейерной ленты и прогибом ее на роликоопоре и действующие вдоль линии конвейерной ленты транспортера, воспринимаются боковыми сторонами жесткой рамы параллелограмма грузоприемной платформы 1, параллельными конвейерному ставу 2. Так как грузоприемная платформа 1 одной стороной по углам закреплена в самоцентрирующихся подшипниках 11, то это позволяет при достаточной ее жесткости отслеживать центральную плоскость конвейерной ленты, а следовательно, более полно передавать вертикальную составляющую силу транспортируемой массы, воздействующую на роликоопору 4, на датчик 6 веса.
Низкочастотные колебания, возникающие из-за проскальзывания конвейерной ленты и неравномерности тягового усилия, гасятся демпфирующими элементами 7, выполненными из двух полос рессорной стали.
Формула изобретения
Автоматические конвейерные весы, содержащие конвейерный став, конвейерную ленту, датчик веса, связанный с коромыслом, концы которого скреплены гибкими связями с осью роликоопоры, и грузоприемную плат- форму, отличающиеся тем, что, с целью повышения точности взвешивания,, упрощения конструкции, в них введены самоцентрлрующие подшипники, П-обратная стройка, горизонтальная часть которой связана с датчиком веса через демпфирующий элемент, регулировочные винты, расположенные между коромыслом и гибкими 1 связями, выполненными неупругими, а грузоприемная платформа выполнена в виде жесткой рамы в форме параллелограмма, одна сторона которой скреплена с роликоопорой, а противоположная по углам через самоцентрирующиеся подшипники связана с конвейерным ставом, при этом демпфирующий элемент с датчиком веса связан с коромыслом, а ось роликоопоры расположена в плоскости П-образной стойки.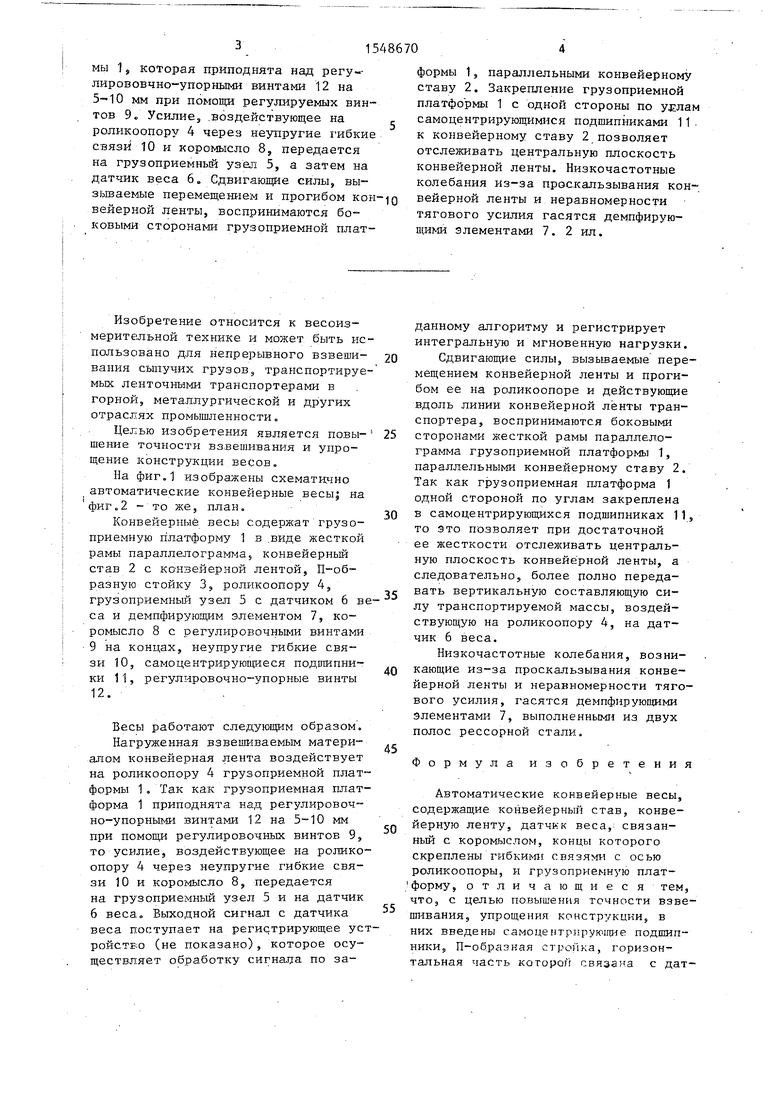
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕРНЫЕ ВЕСЫ, ЗАЩИЩЕННЫЕ ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ ТРАНСПОРТИРУЕМОГО ГРУЗА | 2003 |
|
RU2247335C1 |
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| Конвейерные весы | 1990 |
|
SU1735723A1 |
| Конвейерные весы | 1982 |
|
SU1107001A1 |
| Конвейерные весы | 1987 |
|
SU1587343A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Конвейерные весы конвейеров прямого и реверсивного хода | 2016 |
|
RU2625042C1 |
| Весоизмерительное устройство | 1987 |
|
SU1532819A1 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ КОНВЕЙЕРНЫХ ВЕСОВ | 2005 |
|
RU2289798C1 |
Изобретение относится к весоизмерительной технике и может быть использовано для непрерывного взвешивания сыпучих грузов, транспортируемых ленточными транспортерами в горной, металлургической и других отраслях промышленности. Цель изобретения - повышение точности взвешивания и упрощение конструкции. Нагруженная взвешиваемвым материалом конвейерная лента воздействует на роликоопору 4 грузоподъемной платформы 1, которая приподнята над регулировочно-упорными винтами 12 на 5...10 мм при помощи регулируемых винтов 9. Усилие, воздействующее на роликоопору 4 через неупругие гибкие связи 10 и коромысло 8 передается на грузоприемный узел 5, а затем на датчик веса 6. Сдвигающие силы, вызываемые перемещением и прогибом конвейерной ленты, воспринимаются боковыми сторонами грузоприемной платформы 1, параллельными конвейерному ставу 2. Закрепление грузоприемной платформы 1 с одной стороны по углам самоцентрирующимися подшщипниками 11 к конвейерному ставу 2 позволяет отслеживать центральную плоскость конвейерной ленты. Низкочастотные колебания из-за проскальзывания конвейерной ленты и неравномерности тягового усилия гасятся демпфирующими элементами 7. 2 ил.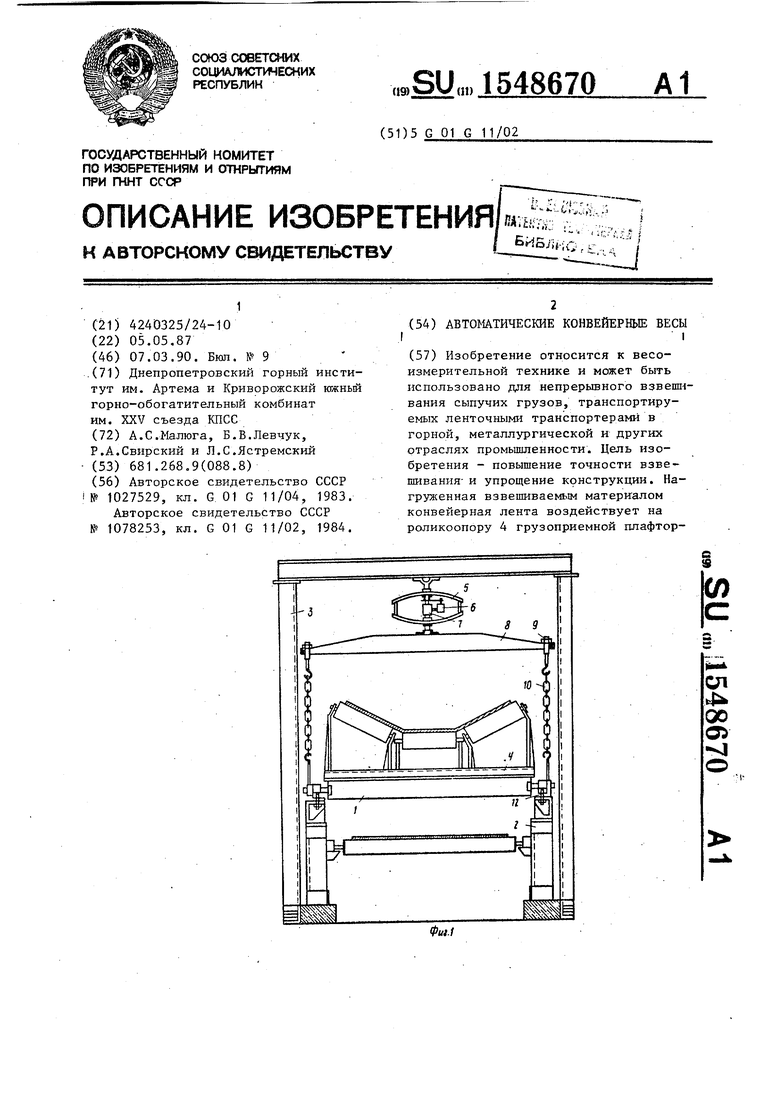
я
I
//
ЛЬМП
m
1
| Конвейерные весы | 1982 |
|
SU1027529A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматические конвейерные весы | 1982 |
|
SU1078253A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
