Изобретение относится к весоизмерительной технике и предназначено для взвешивания сыпучих и кусковых материалов при их транспортировании ленточными
конвейерами.
Цель изобретения - повышение точности измерения погонной нагрузки за счет умеьшения влияния горизонтальных составляющих усилия.
На чертеже представлена конструктивная схема конвейерных весов.
Конвейерные весы содержат грузопри- ёмную площадку 1 с единичной роликоопо- рой 2, установленной под транспортерной лентой 3 конвейера. Грузоприемная площадка 1 опирается на силоизмерительный датчик 4, установленный на раме 5 конвейерных весов, которая закреплна на ставе 6 конвейера, и параллелограммный механизм, образованный участками 7 и 8 рамы конвейерных весов, участками 9 и 10 грузоприемной площадки и четырьмя пластинами 11, которые посредством упругих шарниров 12 связывают раму 5 с грузоприемной площадкой 1 конвейерных весов. Весы работают следующим образом. Усилие от перемещаемого материала транспортной лентой 3 конвейера воспринимается единичной роликоопорой 2 и через грузоприемную площадку 1 передается на силоизмерительный датчик 4, выходной сигнал которого по величине оказывается в текущие моменты времени пропорциональным измеряемой массе материала, находящегося на измерительном участке транспортерной ленты 3 конвейера.
При этом горизонтальные усилия Pi, воздействующие на единичную роликоопору 2, воспринимаются четырьмя пластинами 11 с встроенными в них упругими шарнирами 12.
На верхние пластины параллелограмм- ного механизма воздействуют усилия, пропорциональные величине
А +h
.(1)
а на нижние пластины - усилия, пропорциональные величине
RB KiPr- ;
0-RB-r K,P.,(2)
где RA, RA RB, RB - силы реакции в пластинах параллелограммного механизма, возникающие от действия горизонтальной составляющей силы Рп
5Ki, Ка- коэффициент пропорциональности, Ki+K2 1;
А - расстояние между ос ями шарниров верхней и нижней пластин параллелограммного механизма;
0 h - расстояние между осью шарнира верхней пластины параллелограммного механизма и горизонтальной осью вращения единичной роликоопоры.
Выражения (1) и (2) получаются из усло- 25 ВИЯ обеспечения нулевого перемещения грузоприемной площадки 1 при действии горизонтального усилия и равенства суммы .моментов нулю относительно точек А и Б грузоприемной площадки. 30 В случае возникновения упругих деформаций от действия горизонтальных усилий в упругих шарнирах 12 параллелограммного механизма, их величины пропорциональны величинам усилий, 35 определяемых выражениями (1) и (2).
Учитывая, что под действием горизонтальных усилий верхние пластины параллелограммного механизма растягиваются, а нижние сжимаются, можно записать I КА А-Нf3
ШТ I КБ I Н где йд и 5в - величины перемещений соответственно точек А и Б грузоприемной площадки. 45 .
Зависимость (3) с учетом (1) и (2) определяет координату точки опоры горизонтальной площадки на силоизмерительный датчик по высоте Н относительно оси нижнего шарнирного соединения
Н
А Xh
A+2h
При этом точка контакта силоизмери- тельного датчика 4 с параллелограммным механизмом, лежащая на линии пересечения плоскости,перпендикулярной ставу конвейера и проходящей через ось вращения упругих шарниров 12, связанных с гру- зоприемной площадкой 1, и плоскости, параллельной ставу конвейера и проходящей на расстоянии Н от оси нижнего упругого шарнира 12, не будет перемещаться, что обеспечивает независимость измерения вертикальных усилий от действия горизонтальных сил, обусловленных тяговыми усилиями транспортерной ленты.
Учитывая, что расстояние между осью шарнира верхней пластины параллелограм- много механизма и местом приложения тяговых горизонтальных усилий для конструкций конвейерных весов меняется в зависимости от угла наклона боковых составляющих единичной роликоопоры 2, величина Н определяется как
ATIh()
50
55
10
15
20
Формулаизобретения
Конвейерные весы, содержащие сило- измерительный датчик, связанный с единичной роликоопорой через скрепленный с одной стороны со ставом конвейера парал- лелограммный механизм, включающий четыре пластины, попарно расположенные в плоскостях, параллельных плоскости грузо- приемной площадки, отличающиеся тем, что, с целью повышения точности измерения погонной нагрузки за счет уменьшения влияния горизонтальных составляющих усилия, они снабжены упругими шарнирами, скрепляющими пластины в параллелог- раммном механизме, при этом точка контакта силоизмерительного датчика с параллелограммным механизмом расположена на линии пересечения плоскости, перпендикулярной ставу конвейера и проходящей через оси вращения упругих шарниров, и плоскости, параллельной ставу конвейера и находящейся на расстоянии Н от нижних упругих шарниров, которое определяется следующим соотношением
+ATk()где А - расстояние между осями шарниров верхней и нижней пластин параллелограм- много механизма:
h - расстояние между осью шарнира верхней пластины параллелограммного механизма и горизонтальной осью вращения единичной роликоопоры.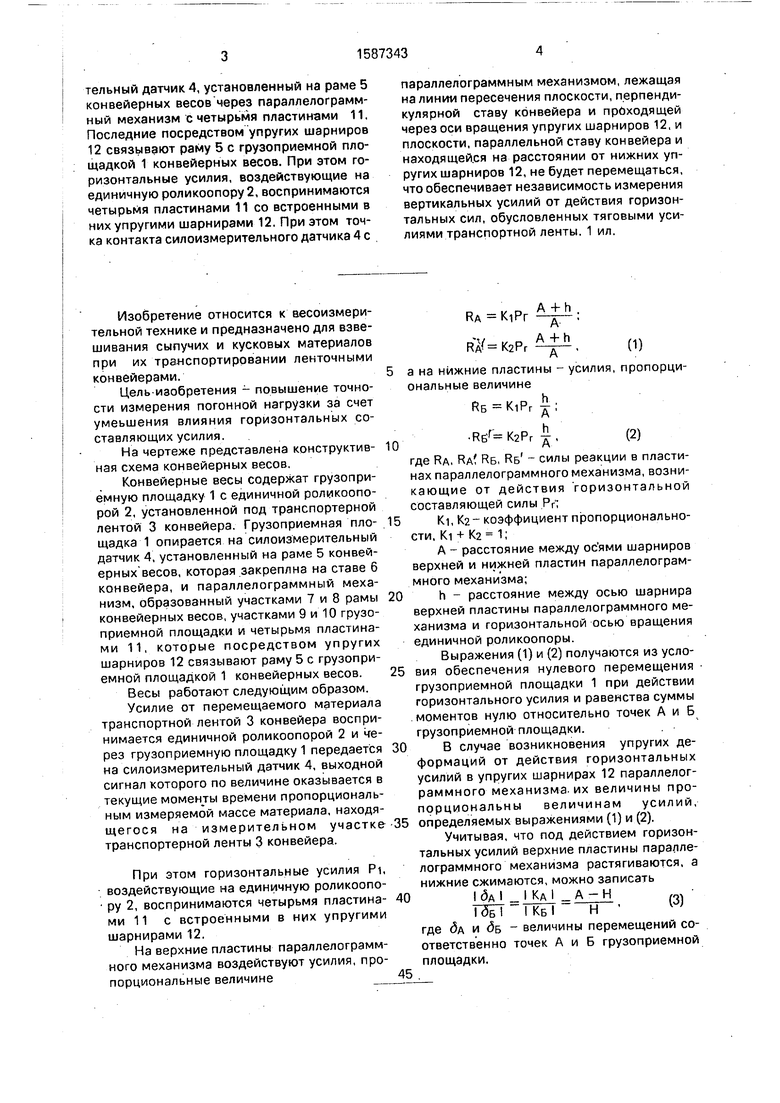
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| Конвейерные весы | 1982 |
|
SU1107001A1 |
| Конвейерные весы | 2018 |
|
RU2733977C2 |
| Конвейерные весы | 1990 |
|
SU1735723A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Конвейерные весы | 1976 |
|
SU714160A1 |
| Конвейерные весы | 1987 |
|
SU1451554A1 |
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 1998 |
|
RU2152010C1 |
| Способ поверки конвейерных весов | 1989 |
|
SU1663445A1 |
Изобретение относится к весоизмерительной технике и предназначено для взвешивания сыпучих и кусковых материалов при их транспортировании ленточными конвейерами. Цель изобретения - повышение точности измерения погонной нагрузки за счет уменьшения влияния горизонтальных составляющих усилия. Усилие от перемещаемого транспортерной лентой 3 конвейера материала воспринимается единичной роликоопорой 2 через грузоприемную площадку 1, которая опирается на силоизмерительный датчик 4, установленный на раме 5 конвейерных весов через параллелограммный механизм с четырьмя пластинами 11. Последние посредством упругих шарниров 12 связывают раму 5 с грузоприемной площадкой 1 конвейерных весов. При этом горизонтальные усилия, воздействующие на единичную роликоопору 2, воспринимаются четырьмя пластинами 11 со встроенными в них упругими шарнирами 12. При этом точка контакта силоизмерительного датчика 4 с параллелограммным механизмом, лежащая на линии пересечения плоскости, перпендикулярной ставу конвейера и проходящей через оси вращения упругих шарниров 12, и плоскости, параллельной ставу конвейера и находящейся на расстоянии от нижних упругих шарниров 12, не будет перемещаться, что обеспечивает независимость измерения вертикальных усилий от действия горизонтальных сил, обусловленных тяговыми усилиями транспортерной ленты. 1 ил.
| КОНВЕЙЕРНЫЕ ВЕСЫ | 0 |
|
SU320726A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Горн для спайки дымогарных труб | 1928 |
|
SU9123A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
