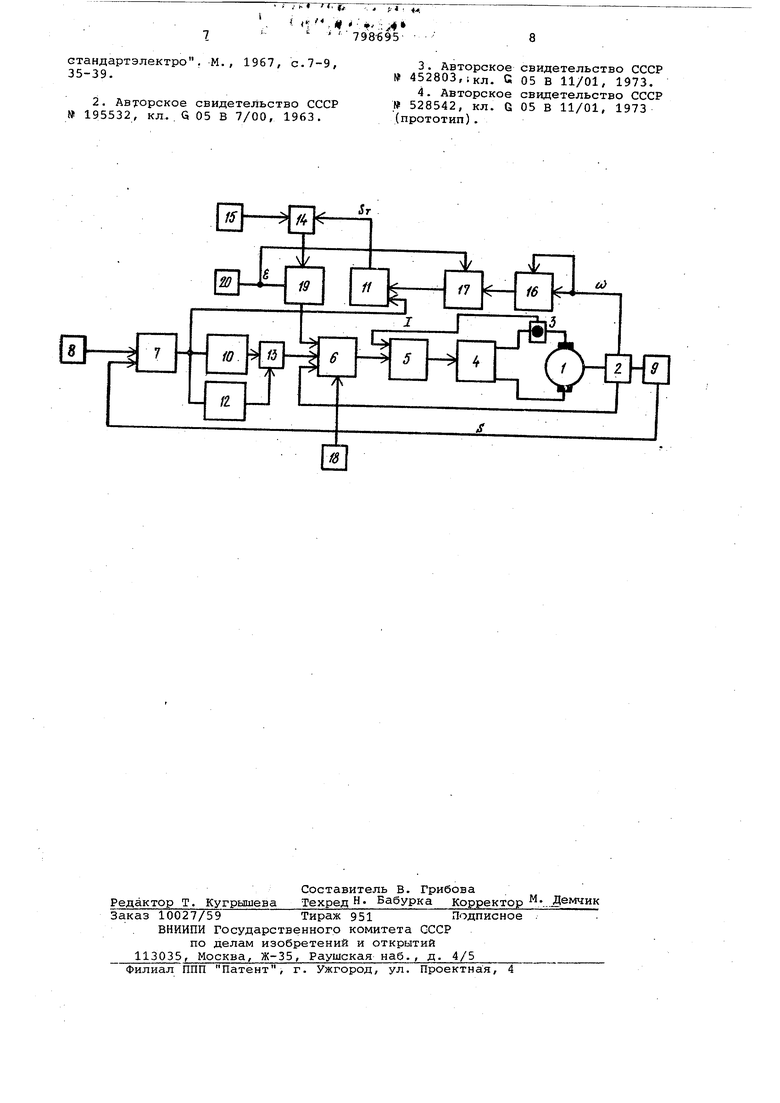
Предлагаемое, устройство относится к автоматическому управлению элект роприводами и может быть использовано в системах позиционного электропривода. Известны устройства управления, в которых для исключения перюрегули рования при ограничении производных пути по времени параллельно основному регулятору положения включен блок определения воемени начала торможения р. . 2. Однако в таких устройствах блок определения времени начала торможени обеспечивает отработку перемещения без перерегулирования и дотягивания только в случае равенства тормозного пути половине заданного. Известно также устройство управления позиционным электроприводом, в котором повышение точности позицио нирования достигается путем поддержа ния угла торможения неизменным независимо от статического момента и инерционных масс подвижных, частей ме -ханизма. Определе ние значения тормозного момента в этом устройстве вы полняется схемой обработки информации в процессе перемещения исполнит тельного органа на установившейся скорости З i Однако такое устройство не позволяет определить тормозной путь, который обеспечил бы при равнозамедленном движении останов исполнительного органа в момент, когда отрабатываемый путь равен заданному. Кроме того, устройство обеспечивает заданную точность позиционирования только при наличии установившейся скорости движения исполнительного органа и при отсутствии нйешних возмущений. Наиболее близким по технической сущности к предлагаемому является устройство управления позиционным электроприводом, содержащее последовательно соединенные регулятор скорости, регулятор тока, второй вход которого соединен с датчиком тока, усилитель мощности, выходы которого непосредственно и через датчик тока соединены со входами электродвигателя, вал которого кинематически связан с датчиками скорости и положения, выход датчика скорости соединен с первым входом регулятора скорости. Выход датчика положения соединен с одним из входов первого, блока сравнения, другой вход которого соединен с блоком Зсщания перемещения, а вьГход - с входами регулятора положения и датчика малых рассогласований, блок умножения, входы которого соеди нены с выходом датчика скорости, а выход - с первым входом блока деления, второй вход которого соединен с выходом сумматора, а выход - с управляющим входом первого ключа, вход которого соединен с задатчиком скорости, а выход - со .вторым входом ре рулятора скорости, третий вход которого соединен с выходом второго ключа, управляющий вход которого соединен с выходом датчика малых рассогла сований, а вход - с выходом регулято ра положения, задатчик момента соединен с токоограничивающим входом регулятора скорости и с одним из ухо дов сумматора, другой вход которого соединен с выходом задатчика статического момента, первый вход которог соединен с датчиком тока, второй - с датчиком скорости. Повышение точности устройства достигается исключением влияния несоот ветствия законов изменения пути и ск рости при ограничении производной пу во времени на протекание процесса пр отработке перемещения. , Исключение этого влияния обеспечи вается размыканием контура положения системы при отработке перемещения, а определение момента времени начала, торможения выполняется схемой обработки информации о скорости, .пусково и статическом моментах привода, а та же об оставшемся пути отработки исполнительного органа 4 . Однако такое устройство не позвол ет определить с необходимой точностью путь торможения при изменении инерционных масс, связанных с валом электродвигателя, а также при изменении момента сопротивления исполнительного саргана, что ухудшает точност позиционирования и качество регулиро вания. Цель изобретения - повьлпение точности позиционирования и качества ре гулирования посредством полного исключения влияния на работу схемы изменения инерционных масс, связанных с валом электродвигателя и статическфго момента сопротивления исполнит льного органа, а также упрощение схемы. Поставленная цель достигается тем что в устройстве управления позиционным электроприводом установлены задатчик ускорения и масштабный блок, выход которого соединен со вторым входом блока деления и ,с управляющим входом масштабного блока, вход которого соединен с выходом второго ключа, а выход - с третьим, входом регулятора скорости. На чертеже представлена блок-схема предлагаемого устройства. Устройство содержит электродвигатель 1, датчик 2 скорости, датчик 3 тока, усилитель 4 мощности, ре гуля-, тор 5 тока, регулятор 6 скорости, первый блок 7 сравнения, блок 8 задания/ перемещения, датчик 9 положения, регулятор 10 положения, второй блок 11 .сравнения, датчик 12 малых рассогласований, первый 13 и второй 14 ключи, задатчик 15 скорости, блок 16 умножения, блок 17 деления, задатчик 18 момента, масштабный блок 19, задатчик 20 ускорения, причем выходы усилителя мощности непосредственно и через датчик 3 тока соединены с входами электродвигателя 1, вал которого кинематически связан с датчиками 2 скорости и 9 положения, выход датчика 2 скорости соединен с первым входом регулятора 6 скорости, выход которого соединен с входом регулятора 5 тока, второй вход которого соединен с датчиком 3 тока, а выход с входом усилителя 4 мощности, выход датчика 9 положения соединен с одним из входсгм первого блока 7 ср31внения, другой вход которого соединен с блоком 8 задания перемещения, а выход с входами регулятора 10 положения, второго блока 11 сравнения и датчика 12 малых рассогласований, выход которого соединен с управляющим входом :первого ключа 13, вход которого соединен с выходом регулятора 10 положения, а выход - с вторым входом регулятора 6 скорости, токоограничивающий вход которого соединен с Зсщатчиком 18 полного момента, входы блока 16 умножения соединены с выходом датчика 2 скорости, а выход - с первым входом блока 17 деления, выход которого соединен с вторым входом второго блока 11 сравнения, выход которого соединен с управляющим входом второго ключа 14, вход которого соединен с выходом задатчика 15 скорости, а выход которого соединен с входом масштабного блока 19, управляющий вход которого соединен с выходом задатчика.20 ускорения, а выход - с третьим входом регулятора 2 скорости, второй вход блока 17 деления соединен с выходом задатчика 20 ускорения. Путь торможения до полной остановки электродвигателя при равнозамедленном движении определяется выражением где () - угловая скорость э.лектродвигателя, Е- угловое ускорение и замедление электродвигателя. .Приведенная зависимость реализуется с помощью блоков 16 умножения и 17 деления подачей на вход блока 16 умножения сигнала, пропорционального угловой скорости электродвигат.еля 1, и на вход блока 17
деления сигнала, пропорционального ускорению электродвигателя 1. В результате на выходе блока 17 деления образуется сигнал, пропорциональный тормозному пути. Ускорение определяется задатчиком 20 ускорения, И нз зависит от. изменения инерционных масс, связанных с валом электродвигателя и статического момента сопротивления.
Устройство работает следующим Образомi
При подаче сигнала на нербходимое перемещение от блока 8 задания перемещения tid выходе первого блока 7 сравнения, (который может быть дискретно-анадаговым или сельсинной паро с фазочувствительным выпрямителем) возникает сигнал, который поступает на входы датчика 12 малых рассогласований и второго блока 11 сравнения. Датчик 12 малых рассогласований подает сигнал на управляющий вход первого ключа 13, который отключает выход регулятора 10 положения от входа регулятора 6 скорости. Второй блок 11 ср авнения подает сигнал на управляющий вход второго ключа 14 и подключает задатчик 15 скорости к входу масштабного блока 19. Нарастающий сигнал на. выходе этого блока с темпом пропорциональным сигналу задатчика 20 ускорения, поступает на вход регулятора б скорости. Вследствие этого ускорение электродвигателя 1 пропорционально уровню сигнала на выходе задатчика 20 ускорения. В процессе перемещения исполнительного органа сигнал на выходе датчика 9 положения увеличивается, а на выходе первого блока 7 сравнения уменьшается. Одновременно на входы блока 1бумножения и блока 17 деления поступают сигйалы с выхода датчика 2 скорости и задатчика 20 ускорения. Блок 16 умножения и блок 17 деления производят обработку поступающей информации согласно вышеприведенному выражению, в результате чего этими блоками осуществляется предсказание пути торможения для текущей скорости и заданного темпа торможения электродвигателя. Когда, уменьшаясь,iсигнал на выходе первого блока 7 сравнения станет равным сигналу предсказания на выходе блока 17 деления, второй ключ 14 отключает задатчик 15 скорости от масштабного блока 19, в результате чего сигна:л на выходе масштабного блока 19 уменьшается с интенсивностью, пропорциональной сигналу на выходе задатчика 20 ускорения. Когда сигнал на выходе первого блока 7 сравнения станет близким к нулю, датчик 12 малых рассогласований через первый ключ 13 подключает регулятор 10 положения к регулятору 6 скорости. Устройство замыкается по положению (вводится в действие третий контур регулировйния), чем достигается высокая точность установки - исполнительного органа в заданное положение и сохранение этого положения при воздействии внешних возмущений на исполнительный орган.
Принцип отработки перемещений трапецеидальным графиком изменения скорости аналогичен вышеизложенному..
Предлагаемое устройство улучшает качество регулирования системы в статике и динамике. Кроме того, оно упрощено,, и все узлы в этом устройстве изготавливаются серийно промышленностью, что требует меньших затрат на его реализацию.
Формула изобретения
Устройство управления позиционным электроприводом, содержащее последовательно соединенные регулятор скорости, регулятор тока, второй вход которого соединен с,датчиком тока, усилитель мощности, выходы которого непосредственно и через датчик тока соединены со входами электродвигателя, вал которого кинематически связан с датчиками скорости и положения выхо датчика скорости соединен с первым входом регулятора скорости, выход датчика положения соединен с одним из входов первого блока сравнения, другой вход которого соединен с блоком задания перемещения, а выход - с входами регулятора положения второго блока сравнения и датчика малых рассогласований, выход которого соединен с управляющим входом первого ключа, вход которого соединен с выходом регулятора положения, а выход со вторым входом регулятора скорости, токоограничивакаций вход которого соединен с задатчиком момента, блок умножения, два входа которого соединены с выходом датчика скорости, а выход - с первым входом блока деления, выход которого соединен с вторым входом второго блока сравнения, выход которого соединен с управлякицим входом второго ключа, вход которого соединен с выходом эадатчика скорости, отличающееся тем, что, с целью повышения точности и упрощения устройства, в нем установлены масштабный блок и задатчикй ускорения, выход которого соединен со вторым входом блока деления и с управляющим входом масштабного блока, вход которого соединен с выходом второго ключа, а выход - с третьим входом регулятора скорости.
Источники информации, принятые во внимание при экспертизе 1. СлежановскиЬ О. В. Унифицированные системы автоматического регулирования электропривода. Информстандартэлектро, М., 1967, с.7-9, 35-39.
2. Авторское свидетельство СССР № 195532, кл..Q 05 В 7/00, 1963.
свидетельство СССР 05 В 11/01, 1973.
свидетельство СССР 05 В 11/01, 1973 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления позиционным электроприводом | 1973 |
|
SU528542A1 |
| Устройство для адаптивного управленияпОзициОННыМ элЕКТРОпРиВОдОМ | 1978 |
|
SU798708A1 |
| Устройство для управления позиционным электроприводом | 1981 |
|
SU993199A1 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство управления летучими ножницами | 1985 |
|
SU1304994A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Система регулирования положения | 1990 |
|
SU1795416A1 |
| Следящая система позиционирования | 1981 |
|
SU962842A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
