Группа изобретений относится к системам управления строительными машинами и может применяться в строительных машинах с гидроприводом.
Известен способ управления исполнительным механизмом строительной машины с гидроприводом при помощи рукоятки-манипулятора, предусматривающий создание задающего сигнала, формирование управляющего воздействия на гидропривод с помощью электрогидравлического преобразователя путем перемещения оператором рукоятки-манипулятора, в которую встроен датчик положения / Конструктор для взрослых. Часть 4. Крепче за джойстик... // Строительная техника и технологии. - 2004. - №4. - с.120-125 / [1].
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относят то, что известный способ не позволяет обеспечить широкий диапазон регулирования скорости движения исполнительного механизма строительной машины с гидроприводом, в том числе плавность перемещения в области малых ("ползучих") скоростей.
Наиболее близким способом того же назначения к заявленному способу в группе изобретений по совокупности признаков является способ управления исполнительным механизмом строительной машины с гидроприводом при помощи рукоятки-манипулятора, предусматривающий создание задающего сигнал с помощью рукоятки-манипулятора с индуктивным датчиком положения, формирование управляющего воздействия на гидропривод с помощью электрогидравлического преобразователя через силовые электронные ключи-регуляторы тока / Паспорт к аппарату управления электрогидравлическими распределителями АУРСП23.2 НПП «Резонанс», 2000 г. [2]. Этот способ принят за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относят то, что в известном способе не обеспечивается стабилизация поддержания скорости исполнительного механизма строительной машины с гидроприводом, в области малых ("ползучих") скоростей из-за изменения моментов нагрузки гидропривода, в результате чего оператор должен постоянно корректировать скорость перемещения исполнительного механизма строительной машины с гидроприводом, что в условиях частых пусков и торможений весьма затруднительно, а часто и невозможно из-за скоротечности динамических процессов.
Известно устройство для управления исполнительным механизмом строительной машины с гидроприводом, включающее в себя рукоятку-манипулятора с датчиком положения, электрогидравлический преобразователь / Конструктор для взрослых. Часть 4. Крепче за джойстик... // Строительная техника и технологии. - 2004. - №4. - с.120-125 [1].
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относят то, что использование не позволяет обеспечить широкий диапазон регулирования скорости движения исполнительного механизма строительной машины с гидроприводом, в том числе плавность перемещения в области малых ("ползучих") скоростей.
Наиболее близким устройством того же назначения к заявленному устройству в группе изобретений по совокупности признаков является устройство для управления исполнительным механизмом строительной машины с гидроприводом, включающее в себя рукоятку-манипулятор с индуктивным датчиком положения, силовые электронные ключи-регуляторы тока / Паспорт к аппарату управления электрогидравлическими распределителями АУРСП23.2 НПП «Резонанс», 2000 г. [2].
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относят то, что не обеспечивается стабилизация поддержания скорости исполнительного механизма строительной машины с гидроприводом при изменении нагрузки гидропривода.
Сущность изобретения заключается в следующем. Для повышения технологической надежности строительной машины скорость движения исполнительного механизма в заданном диапазоне скоростей не должна зависеть от момента нагрузки на гидропривод. Для выполнения этого условия необходимо обеспечить стабилизацию скорости исполнительного механизма в заданном диапазоне, в том числе в области малых ("ползучих") скоростей.
Технический результат - повышение технологической надежности строительной машины за счет плавности движения исполнительных механизмов, а также возможность получения широкого диапазона регулирования скорости при переменной нагрузке гидропривода.
Указанный единый технический результат при осуществлении группы изобретений по объекту - способу достигается тем, что в известном способе управления движением исполнительного механизма строительной машины с гидроприводом, включающем создание задающего сигнала с помощью рукоятки-манипулятора с индуктивным датчиком положения, формирование управляющего воздействия на гидропривод с помощью электрогидравлического преобразователя, особенность заключается в том, что дополнительно измеряется скорость исполнительного механизма строительной машины с гидроприводом, сигнал с выхода датчика положения рукоятки-манипулятора сравнивается с выходным сигналом блока измерения скорости исполнительного механизма строительной машины с гидроприводом, в результате образуется первый разностный сигнал, который преобразуется в интегральном регуляторе, выходной сигнал которого сравнивается с выходным сигналом блока измерения скорости, в результате чего образуется второй разностный сигнал, который преобразуется в пропорционально-дифференциальном регуляторе второго порядка и затем подается на электрогидравлический преобразователь гидропривода исполнительного механизма.
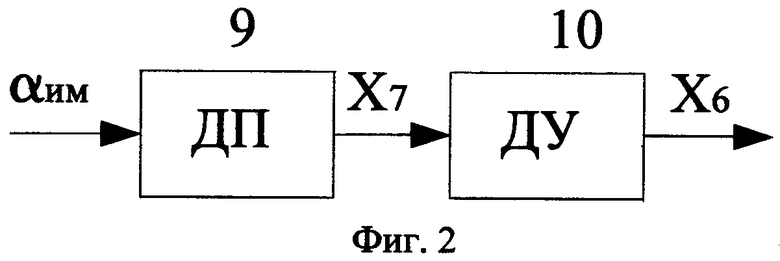
На чертежах представлено: на фиг.1 изображена структурная схема системы управления скоростью исполнительного механизма строительной машины с гидроприводом; на фиг.2 изображена структура блока измерения скорости исполнительного механизма строительной машины с гидроприводом.
При воздействии Хупр оператора на рукоятку-манипулятор с индуктивным датчиком положения 1 (фиг.1) на выходе индуктивного датчика положения возникает сигнал управления Х1, который поступает на прямой вход первого устройства сравнения 2, выходной сигнал Х2 которого преобразуется в интегральном регуляторе 3 в сигнал  , который поступает на прямой вход второго устройства сравнения 4; выходной сигнал Х4 преобразуется в пропорциональнодифференциальном регуляторе второго порядка 5 в сигнал
, который поступает на прямой вход второго устройства сравнения 4; выходной сигнал Х4 преобразуется в пропорциональнодифференциальном регуляторе второго порядка 5 в сигнал  , который подается на вход электрогидравлического преобразователя 6, который управляет расходом рабочей жидкости Q гидродвигателя исполнительного механизма строительной машины с гидроприводом 7, скорость ω которого измеряется блоком измерения скорости исполнительного механизма 8, выходной сигнал Х6 которого подается на инверсные входы первого устройства сравнения 2 и второго устройства сравнения 4.
, который подается на вход электрогидравлического преобразователя 6, который управляет расходом рабочей жидкости Q гидродвигателя исполнительного механизма строительной машины с гидроприводом 7, скорость ω которого измеряется блоком измерения скорости исполнительного механизма 8, выходной сигнал Х6 которого подается на инверсные входы первого устройства сравнения 2 и второго устройства сравнения 4.
При работе машины, по требованиям технологической надежности, необходимо, чтобы скорость движения исполнительного механизма машины в заданном диапазоне скоростей не должна зависеть от момента нагрузки на гидропривод. Выполнение этого условия возможно лишь при плавном регулировании и поддержании скорости движения исполнительного механизма строительной машины с гидроприводом при переменной нагрузке гидропривода. Данные требования выполняются в замкнутой по скорости системе автоматического управления гидроприводом исполнительного механизма строительной машины с гидроприводом.
Указанный единый технический результат при осуществлении группы изобретений по объекту - устройству достигается тем, в известном устройстве, содержащем рукоятку-манипулятор с индуктивным датчиком положения, электрогидравлический преобразователь, выход которого соединен со входом гидродвигателя исполнительного механизма, особенность заключается в том, что устройство дополнительно снабжено первым и вторым устройствами сравнения, интегральным регулятором и пропорционально-дифференциальным регулятором второго порядка, блоком измерения скорости исполнительного механизма строительной машины с гидроприводом, причем выход индуктивного датчика рукоятки-манипулятора соединяется с прямым входом первого устройства сравнения, выход которого соединен со входом интегрального регулятора, выход интегрального регулятора соединен с прямым входом второго устройства сравнения, выход которого соединен со входом пропорционально-дифференциального регулятора второго порядка, выход которого подключен ко входу электрогидравлического преобразователя, выходной сигнал блока измерения скорости исполнительного механизма строительной машины с гидроприводом подается на инверсные входы первого и второго устройств сравнения.
На фиг.1 изображена структурная схема системы управления скоростью исполнительного механизма строительной машины с гидроприводом. Она включает в себя рукоятку-манипулятор с индуктивным датчиком положения 1, первое устройство сравнения 2, интегральный регулятор 3, второе устройство сравнения 4, пропорционально-дифференциальный регулятор второго порядка 5, электрогидравлический преобразователь 6, исполнительный механизм строительной машины с гидроприводом 7, блок измерения скорости исполнительного механизма 8.
На фиг.2 изображена структура блока измерения скорости исполнительного механизма строительной машины с гидроприводом. Она включает в себя датчик положения 9 исполнительного механизма строительной машины с гидроприводом и дифференцирующее устройство 10.
Заявленное устройство позволяет автоматически поддерживать скорость движения исполнительного механизма строительной машины с гидроприводом при изменении нагрузки гидропривода. С применением заявленного устройства расширяется диапазон регулирования скорости исполнительного механизма и появляется возможность получения малых ("ползучих") скоростей.
Выходной сигнал индуктивного датчика положения рукоятки-манипулятора 1 поступает на прямой вход первого устройства сравнения 2, выходной сигнал которого поступает на вход интегрального регулятора 3, с выхода которого сигнал приходит на прямой вход второго устройства сравнения 4. Выходной сигнал второго устройства сравнения 4 поступает на вход пропорционально-дифференциального регулятора второго порядка 5, с выхода которого поступает на вход электрогидравлического преобразователя 6, который формирует сигнал управления скоростью исполнительного механизма строительной машины с гидроприводом 7, скорость которого измеряется блоком измерения скорости исполнительного механизма 8, выходной сигнал которого подается на инверсные входы первого устройства сравнения 2 и второго устройства сравнения 4.
Заявленная группа изобретений соответствует требованиям единства изобретения, поскольку группа разнообъектных изобретений образует единый изобретательский замысел, причем одно из заявленных объектов групп - устройство для управления исполнительным механизмом строительной машины с гидроприводом предназначено для осуществления другого заявленного объекта группы - способа управления исполнительным механизмом строительной машины с гидроприводом, при этом оба объекта группы изобретений направлены на решение одной и той же задачи с получением единого технического результата.
Сведения, подтверждающие возможность осуществления каждого объекта заявленной группы изобретений с получением указанного технического результата.
По объекту - способу управления исполнительным механизмом строительной машины с гидроприводом.
Гидродвигатель характеризуется естественной характеристикой (зависимость скорости вращения либо линейного перемещения от развиваемого момента либо усилия). Естественная характеристика гидродвигателя не позволяет получить малые ("ползучие") скорости, которые часто необходимы при работе строительной машины с гидроприводом. Путем применения замкнутой по скорости системы автоматического управления становится возможным расширение диапазона регулирования скорости исполнительного механизма и получение малых ("ползучих") скоростей.
По объекту - устройству для управления исполнительным механизмом строительной машины с гидроприводом.
В качестве рукоятки-манипулятора 1 (фиг.1) может быть использован "Аппарат управления электрогидравлическими распределителями АУРСП23.2". Электрогидравлический преобразователь 6 представляет собой совокупность широтно-импульсного преобразователя, например цифрового широтно-импульсного модулятора по а.с. 1478316, и электромагнитного гидрораспределителя, например 1Р203.АЛ. Исполнительный механизм строительной машины с гидроприводом 7 представляет собой совокупность гидродвигателя, например гидромотора 210.25.13 и, приводимого им в действии механизма машины, например поворотная платформа машины. В качестве блока измерения скорости исполнительного механизма 8 можно использовать датчик положения 9, вал которого сопрягается с валом исполнительного механизма (фиг.2), цифровой выходной сигнал датчика формируется, например, с помощью "Преобразователя угла поворота вала в код" по а.с. 888163, выходной сигнал которого дифференцируется по времени в дифференцирующем устройстве 10, для получения сигнала пропорционального угловой скорости перемещения исполнительного механизма строительной машины с гидроприводом. Блоки 2-5, 10 выполнены, например, программно, например, на базе однокристального микроконтроллера TMS320C80.
Выходной сигнал индуктивного датчика положения рукоятки-манипулятора 1 (фиг.1) поступает на прямой вход первого устройства сравнения 2. Выходной сигнал первого устройства сравнения 2 поступает на вход интегрального регулятора 3, с выхода которого сигнал приходит на прямой вход второго устройства сравнения 4. Выходной сигнал второго устройства сравнения 4 поступает на вход пропорционально-дифференциального регулятора второго порядка 5, с выхода которого поступает на вход электрогидравлического преобразователя 6, который формирует сигнал управления скоростью исполнительного механизма строительной машины с гидроприводом 7, скорость ω которого измеряется блоком измерения скорости исполнительного механизма 8, выходной сигнал которого подается на инверсные входы первого устройства сравнения 2 и второго устройства сравнения 4.
Устройство работает следующим образом. Рукоятка-манипулятор с индуктивным датчиком положения 1 формирует сигнал задания, который сравнивается с сигналом, эквивалентным текущему значению скорости исполнительного механизма строительной машины с гидроприводом 7, в первом устройстве сравнения 2. Полученный разностный сигнал подается на вход интегрального регулятора 3; далее сигнал поступает на прямой вход второго устройства сравнения 4 и сравнивается с сигналом, эквивалентным текущему значению скорости исполнительного механизма строительной машины с гидроприводом 7. Полученный разностный сигнал подается на вход пропорциональнодифференциального регулятора второго порядка 5 и подается на вход электрогидравлического преобразователя 6, в соответствии с которым на выходе электрогидравлического преобразователя 6 формируется поток рабочей жидкости с расходом Q, который подается на гидродвигатель исполнительного механизм строительной машины с гидроприводом 7, приводя его в движение; скорость ω движения исполнительного механизма строительной машины с гидроприводом 7 измеряется блоком измерения скорости исполнительного механизма 8, выходной сигнал которого подается на инверсные входы первого устройства сравнения 2 и второго устройств сравнения 4. В результате на выходах устройства сравнения появляется новый разностный сигнал, который приводит к изменению выходного сигнала второго регулятора 5, что, в свою очередь, ведет к изменению расхода Q гидродвигателя, изменяя скорость вращения гидродвигателя, а следовательно, и скорость движения исполнительного механизма. Это приводит к тому, что скорость движения исполнительного механизма приближается к значению скорости заданной рукояткой-манипулятором, и в момент их равенства наступает стабилизация скорости движения исполнительного механизма строительной машины с гидроприводом.
Источники информации
1. Конструктор для взрослых. Часть 4. Крепче за джойстик... // Строительная техника и технологии. - 2004. - №4. - с.120-125.
2. Паспорт к аппарату управления электрогидравлическими распределителями АУРСП23.2 НПП «Резонанс», 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1976 |
|
SU692722A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ, ЧУВСТВИТЕЛЬНЫЙ К НАГРУЗКЕ | 2020 |
|
RU2759190C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| Электрогидравлическая система совмещенного управления | 1988 |
|
SU1548363A1 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2151329C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Многоканальная электрогидравлическая система | 1989 |
|
SU1707289A1 |
Группа изобретений относится к системам управления строительными машинами и может применяться в строительных машинах с гидроприводом. Технический результат - повышение технологической надежности за счет плавности движения исполнительных механизмов, а также возможность получения широкого диапазона регулирования скорости при переменной нагрузке гидропривода. Способ управления движением исполнительного механизма строительной машины с гидроприводом включает создание задающего сигнала с помощью рукоятки-манипулятора с индуктивным датчиком положения, формирование управляющего воздействия на гидропривод с помощью электрогидравлического преобразователя. При этом дополнительно измеряется скорость исполнительного механизма строительной машины с гидроприводом, сигнал с выхода датчика положения рукоятки-манипулятора сравнивается с выходным сигналом блока измерения скорости исполнительного механизма строительной машины с гидроприводом, в результате образуется первый разностный сигнал, который преобразуется в интегральном регуляторе, выходной сигнал которого сравнивается с выходным сигналом блока измерения скорости, в результате чего образуется второй разностный сигнал, который преобразуется в пропорционально-дифференциальном регуляторе второго порядка и затем подается на электрогидравлический преобразователь гидропривода исполнительного механизма. 2 н.п. ф-лы, 2 ил.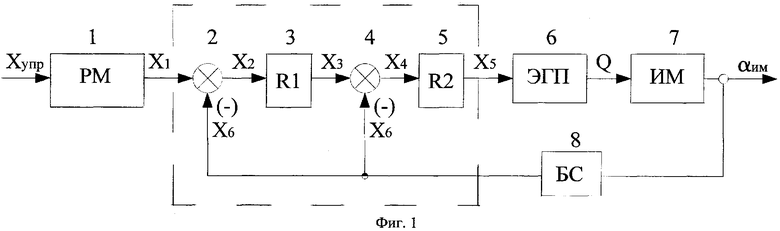
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для измерения угла поворота вала | 1980 |
|
SU888163A1 |
| Гидравлический привод одноковшового экскаватора | 1980 |
|
SU941505A1 |
| Землеройная машина | 1983 |
|
SU1137165A1 |
| Способ управления рабочим процессом землеройной машины | 1985 |
|
SU1263775A1 |
| Цифровой широтно-импульсный модулятор | 1987 |
|
SU1478316A1 |
| Электропривод одноковшового экскаватора | 1990 |
|
SU1735995A1 |

