(54) МОДЕЛЬ ДЛЯ ИСПЫТАНИЯ ПЛАВНИКОВЫХ ДВИЖИТЕЛЕЙ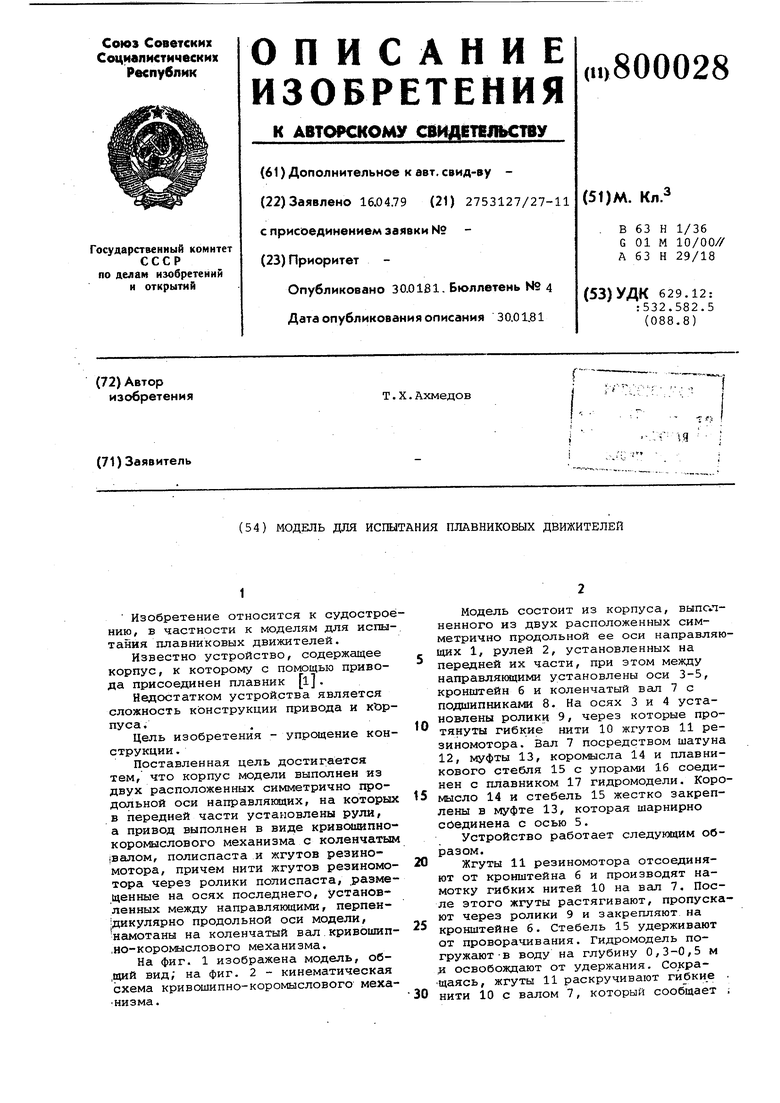
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| ПЛАВНИКОВОЕ ДВИЖИТЕЛЬНОЕ УСТРОЙСТВО | 2008 |
|
RU2482012C2 |
| Плавниковый движитель для лодок | 1976 |
|
SU796074A1 |
| ПРИВОД ПЛАВНИКОВОГО ДВИЖИТЕЛЯ | 2005 |
|
RU2284945C1 |
| ПРИВОД МАШУЩИХ КРЫЛЬЕВ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1984 |
|
SU1253020A1 |
| Активный скуловой стабилизатор качки судна | 2019 |
|
RU2749820C2 |
| Устройство для снятия грата | 1981 |
|
SU984779A1 |
| Способ определения аэродинамических характеристик моделей и устройство для его осуществления | 1986 |
|
SU1462970A1 |
| Гребная установка плавсредства | 1980 |
|
SU880881A1 |
| ПРИВОД ПЕРЕДНЕГО КОЛЕСА МОТОЦИКЛА | 2014 |
|
RU2559857C1 |
1
Изобретение относится к судостроению, в частности к моделям для испытания плавниковых движителей.
Известно устройство, содержащее корпус, к которому с помощью привода присоединен плавник l .
Недостатком устройства является сложность конструкции привода и кЪрпуса.
Цель изобретения - упрощение конструкции .
Поставленная цель достигается тем, что корпус модели выполнен из двух расположенных симметрично продольной оси направляющих, на которых в передней части установлены рули, а привод выполнен в виде кривошипнокоромыслового механизма с коленчатым |Валом, полиспаста и жгутов резиномотора, причем нити жгутов резиномотора через ролики полиспаста, .разме ценные на осях последнего, установленных между направляющими, перпендикулярно продольной оси модели, намотаны на коленчатый вал кривошип,нo-кopo иcлoвoгo механизма.
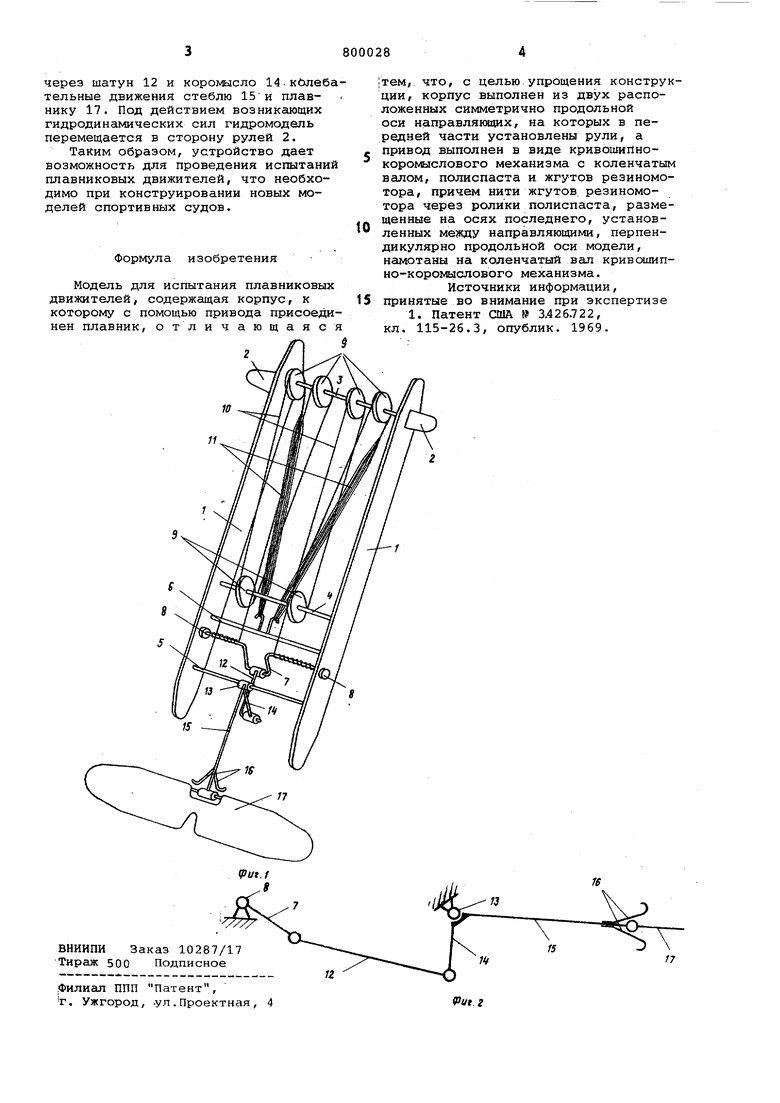
На фиг. 1 изображена модель, обдай вид; на фиг. 2 - кинематическая схема кривошипно-коромыслового механизма.
Модель состоит из корпуса, выполненного из двух расположенных симметрично продольной ее оси направляющих 1, рулей 2, установленных на передней их части, при этом между направляющими установлены оси 3-5, кронштейн б и коленчатый вал 7 с подаиипниками 8. На осях 3 и 4 установлены ролики 9, через которые про0тянуты гибкие нити 10 жгутов 11 резиномотора. Вал 7 посредством шатуна 12, муфты 13, коромысла 14 и плавникового стебля 15 с упорами 16 соединен с плавником 17 гидромодели. Коро5мысло 14 и стебель 15 жестко закреплены в муфте 13, которая шарнирно соединена с осью 5.
Устройство работает следукацим образом.
0
Жгуты 11 резиномотора отсоединяют от кронштейна 6 и производят намотку гибких нитей 10 на вал 7. После этого жгуты растягивают, пропускают через ролики 9 и закрепляют на
5 кронштейне 6. Стебель 15 удерживают от проворачивания. Гидромодель погружают -в воду на глубину 0,3-0,5 м Л освобождают от удержания. Сокра.щаясь, жгуты 11 раскручивают гибкие . 0 нити 10 с валом 7, который сообщает ;
