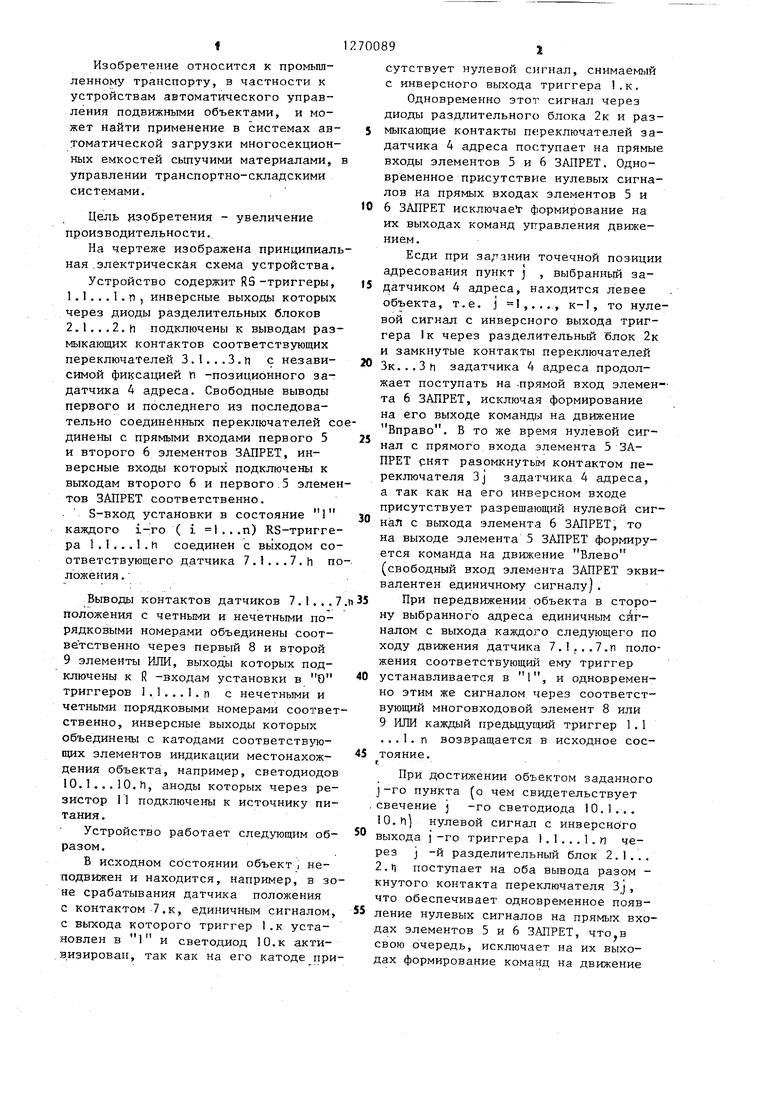
Изобретение относится к промьппленному транспорту, в частности к устройствам автоматического управления подвижными объектами, и может найти применение в системах автоматической загрузки многосекционных емкостей сыпучими материалами, управлении транспортно-складскими системами. Цель изобретения - увеличение производительности. На чертеже изображена принципиаль ная .электрическая схема устройства. Устройство содержит RS-триггеры, 1.1..,1.п , инверсные выходы которых через диоды разделительных блоков 2.1...2.h подключены к выводам раз мыкающих контактов соответствующих переключателей 3.1...3.П с независимой фиксацией п -позиционного задатчика 4 адреса. Свободные выводы первого и последнего из последовательно соединённых переключателей с динены с прямыми входами первого 5 и второго 6 элементов ЗАПРЕТ, инверсные входы которых подключены к выходам второго 6 и первого.5 элеме тов ЗАПРЕТ соответственно. . S-вход установки в состояние каждого i-ro ( i l...n) RS-тригге ра 1.1 ... 1.И соединен с выходом со ответствующего датчика 7.1...7.h п ложения . Выводы контактов датчиков 7 .1 ... положения с четными и нечетными порядковыми номерами объединены соответственно через первый 8 и второй 9 элементы ИЛИ, выходы которых подключены к R -входам установки в О триггеров 1.1....п с нечетными и четными порядковыми номерами соотве ственно, инверсные выходы которых объединены с катодами соответств то(цих. элементов индикации местонахождения объекта, например, светодиодов 0.1...10.h, аноды которых через резистор 11 подключены к источнику питания . Устройство работает следующим образом. В исходном состоянии объект I н:еподвижен и находится, например, в зо не срабатывания датчика положения с контактом 7.к, единичным сигналом с выхода которого триггер 1.к установлен в 1 и светодиод 10.к актив.изирован, так как на его катоде при сутствует нулевой сигнал, снимаемый с инверсного выхода триггера .к. Одновременно этот сигнал через диоды раздлительного блока 2к и размыкающие контакты переключателей задатчика 4 адреса поступает на прямые входы элементов 5 и 6 ЗАПРЕТ. Одновременное присутствие нулевых сигналов на прямых входах элементов 5 и 6 ЗАПРЕТ исключаег формирование на их выходах команд управления движением. Есди при за;т.ании точечной позиции адресования пункт j , выбранный задатчиком 4 адреса, находится левее объекта, т.е. j 1,..., к-1, то нулевой сигнал с инверсного выхода триггера 1к через разделительный блок 2к и замкнутые контакты переключателей Зк. . . 3 п задатчика 4 адреса продолжает поступать на -прямой вход элемента 6 ЗАПРЕТ, исключая формирование на его выходе команды на движение Вправо. В то же время нулевой сигнал с прямого.входа элемента 5 ЗАПРЕТ рнят разомкнутым контактом переключателя 3j задатчика 4 адреса, а так как на его инверсном входе присутствует разрешающий нулевой сигнал с выхода элемента 6 ЗАПРЕТ, то на выходе элемента 5 ЗАПРЕТ формируется команда на движение Влево (свободный вход элемента ЗАПРЕТ эквивалентен единичному сигналу). При передвижении объекта в сторону выбранного адреса единичньм сигналом с выхода каждого следующего по ходу движения датчика 7.1...7.П положения соответствующий ему триггер устанавливается в 1, и одновременно этим же сигналом через соответствующий многовходовой элемент 8 или 9 ИЛИ каждый предыдущий триггер 1.1 ...1. п возвращается в исходное состояние. При достижении объектом заданного J-го пункта (о чем свидетельствует свечение j -го светодиода 10,1... 0.h) нулевой сигнал с инверсного выхода 1-го триггера 1.1... l.n через j -и разделительный блок 2.1.., 2.Ц поступает на оба вывода разом кнутого контакта переключателя З, что обеспечивает одновременное появление нулевых сигналов на прямых входах элементов 5 и 6 ЗАПРЕТ, свою очередь, .исключает на их выходах формирование команд на движение Объект останавливается, и операция поиска выбранного пункта на этом заканчивается. Если пункт j , выбранный задатчиком 4 адреса, находится правее объек та, т.е. j K+l...,h, то команда на продвижение Вправо объекта формируется злементом 6 ЗАПРЕТ. При этом устройство работает аналогично вышеописанному. Если же текущее положение объекта и выбранный задатчиком 4 адрес пункта j совпадают, т.е. j к, то ни один из элементов ЗАЛРЕТ команду на движение не формирует, что свидетель ствует об окончании операции поиска заданного объекта. Рассмотрим работу устройства при задании двумя позициями адресования рабочей зоны, в которой объект совер шает челночное перемещение. Задание рабочей зоны осуществляет ся последовательным .размыканием двух переключателей 3.1...3.11 задатчика 4 адреса соответствующих левой и пра вой границам зоны, причем последовательность задания границ зоны не име ет значения, так как размыкание первого из переключателей вызывает формирование команды на перемещение объ екта в сторону позиции, заданной Ътим переключателем. Последующее заji;aHHe второй границы не изменяет нап равления движения, как в случае нахождения объекта вне заданной зоны, так и в том случае, когда объект находится внутри заданной зоны. В первом случае задание второй границы (размыкание второго из переключателей) не изменяет состояния сигналов на входах, а следовательно, и на выходах элементов 5 и 6 ЗАПРЕТ, установившихся после задания первой границы. Во втором случае после задания второй границы нулевой сигнал снимается также и с прямого выхода друго го элемента ЗАПРЕТ, однако,вследствие того, что последний заблокирован по инверсному входу единичным сигна лом ,с выхода первого элемента ЗАПРЕТ на выходе второго элемента ЗАПРЕТ продолжает удерживаться нулевой сигнал. При этом единичным сигналом с выхода первого элемента ЗАПРЕТ форми руется команда на движение объекта & сторону той границы рабочей зоны, которая была задана первой. Например, если объект находится левее задаваемой рабочей зоны, то независимо от очередности задания левой и правой ее границ на выходе элемента 6 ЗАПРЕТ формируется команда на перемещение Вправо, причем единичным сигналом с выхода элемента 6 ЗАПРЕТ блокируется по инверсному входу элемента 5 ЗАПРЕТ, что исключает формирование на его выходе команды на движение независимо от состояния сигнала на его прямом входе. При въезде объекта в заданную зону (при прохождении объектом позиции. определяющей левук( границу зоны) нулевой сигнал с прямого входа элемента 5 ЗАПРЕТ снимается, однако вследствие того, что последний заблокирован по инверсному входу единичным сигналом с выхода элемента 6 ЗАПРЕТ, состояние сигналов на выходах элементов 5 и 6 ЗАПРЕТ не меняется и объект продолжает движение в направлении Вправо ; При достижении объектом правой границы нулевой сигнал с инверсного выхода триггера 1, соответствующего правой границе, через соответствующий разделительный блок 2 и замкнутые контакты всех последующих за правой границей переключателей 3 задатчика 4 адреса, поступает на прямой вход элемента 6 ЗАПРЕТ, исключая на его выходе единичный сигнал, а так как на прямом входе элемента 5 ЗАПРЕТ нулевой сигнал отсутствует,то при снятии блокировки с его инверсного входа, на его выходе в тот же момент времени формируется единичный сигнал, обеспечивая автоматический реверс объекта у правой границы заданной зоны. Объект начинает перемещаться в обратном направлении и при достижении левой границы зоны состояние сигналов на выходах элементов 5 и 6 ЗАПРЕТ меняется на противоположное. Таким образом, при въезде в зону одвижный объект продолжает движеие к ее противоположной .границе, у оторой автоматически выполняется реерс. В дальнейшем осуществляется авоматическое п.еремещение объекта межу границами зоны в челночном режие до тех пор, пока не будет задана овая, программа.
(

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU800071A1 |
| Устройство для автоматического выбора направления движения объекта | 1986 |
|
SU1323485A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1425146A1 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1154179A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство для автоматического адресования объекта | 1975 |
|
SU640915A1 |
| Устройство для дистанционного управления железнодорожным транспортным средством | 1988 |
|
SU1618693A1 |
| Устройство для адресования подвижного объекта | 1988 |
|
SU1558821A1 |
| Устройство для автоматического выбора направления движения объекта | 1981 |
|
SU1066917A1 |
| Устройство для автоматического адресования транспортного средства | 1987 |
|
SU1497622A2 |

УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА, содержащее по числу позиций останова коммутационные элементы с размыкающим контактом и независимой фиксацией, один из выводов каждого из которых и первого из диодов соответствующего разделительного блока подключен через последовательно соединенные размыкающие контакты коммутационных элементов предьщущюс позиций останова к прямому входу элемента ЗАПРЕТ одного из направлений движения объекта, а другой вывод размыкающего контакта каждого коммутационного элемента и один из выводов второго диода подключен через последовательно соединенные размыкающие контакты коммутационнь1Х элементов последующих поэиций останова к прямому входу элемента ЗАПРЕТ другого направления движения объекта, установленные на позициях останова датчики положения с возможностью взаимодействия с объектом и подключенные к S -входам R5 триггеров, а через элементы ИЛИ датчики положения нечетных позиций останова соединены с R -входами четных а € RS-триггеров и четных позиций останова - с R -входами нечетных RS-тригге(Л ров, инверсные выходы R5 -триггеров подключены соответственно к элементам индикации положения, отличающееся тем, что, с целью увеличения производительности, выходы элементов ЗАПРЕТ взаимно.подклюtsO чены к их инверсным входам, а другие vl выходы диодов разделительных блоков О соединены с инверсными выходами соответствующих R5 -триггеров. о 00 со
.
ч
rJ
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU640927A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU800071A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
