(54) ГРУЗОПЕРЕМЕЩАЮЩЕЕ УСТРОЙСТВО
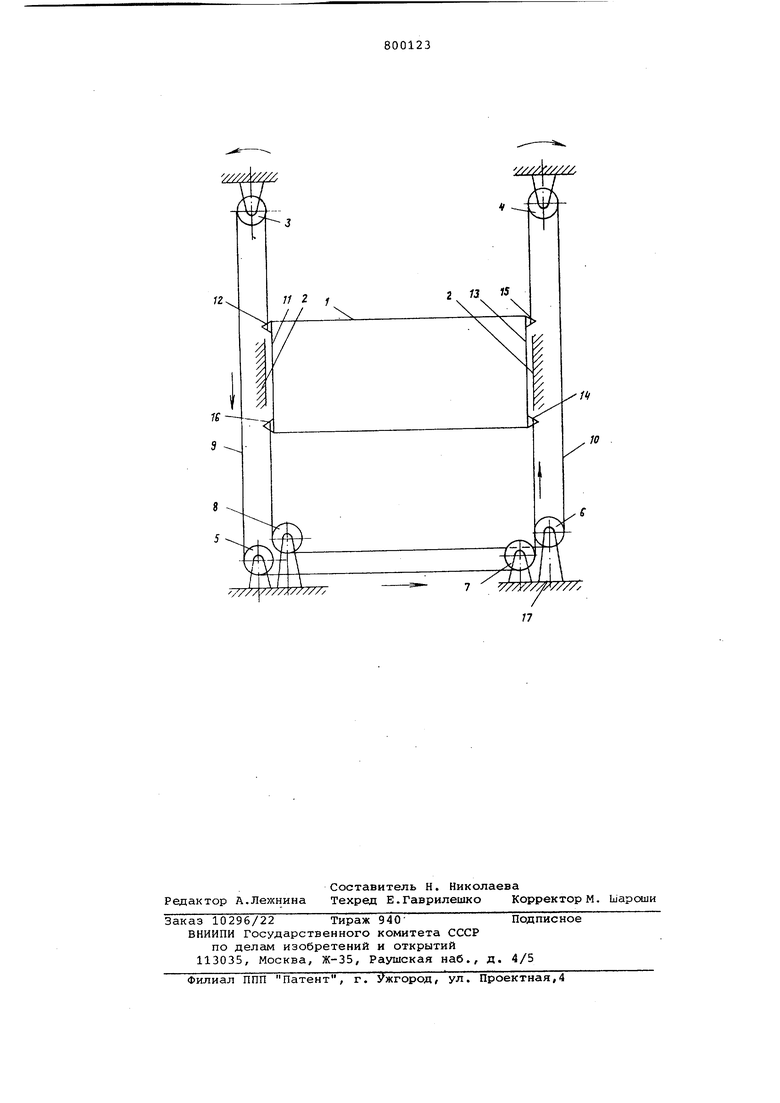
При движении площадки 1 в сторону приводных барабанов 3 и 4 барабан 3, вращаясь против часовой стрелки, перемещает трос 9. Точка крепления 12 троса 9 к плседадке 1 приближается к барабану 3, а точка крепления 14 удаляется от блока 6. Барабан 4, вращаясь по часовой стрелке, перемещает трос 10. Точка крепления 15 троса 10 к площадке 1 приближается к барабану 4, а точка крепления 16 удаляется от блока 8. Общая длина тр сов 9 и 10 при этом остается неизменной, В случае движения плснцадки
1в сторону отклоняющих блоков 5-8 барабаны 3 и 4 реверсируются, остальное происходит аналогично.
В случае возникновения перекоса площадки 1, который может возникнуть при неравномерной нагрузке на площадку 1 (когда один из приводных барабанов окажется нагруженным больше, чем другой), недостаточном сопротивлении, возникающем в направляющих
2с противоположных боковых сторон площадки 1, при разныххарактеристиках (в пределах допуска) двигателей (не показаны)приводящих в движение барабаны 3 и 4, происходит следующее
Допустим, точка 1 имеет тенденцию к отставанию, что соответствует отставанию тягового органа 9 от троса 10. Однако этого произойти не может, так как на точку 12 будет воздействовать трос 10 через точку 15, плсяцадку 1, точку 14, трос 9 и точки 12 и 15 останутся на одном уровне. Таким образом, отставание точки 12 должно соответствовать отставанию точки 14, так как эти точки жестко
связаны между собой посредством троса 9, но отставание точки 14 невозможно, поскольку она связана с приводом 4 через плсицадку 1 и трос 10. То же самое произойдет при попытке уйти вперед точки 12.
Таким образом, предлагаемые системы гибких тяговых органов 9 и 10 исключают перекос площадки 1. Кроме того, упростится конструкция из-за отсутствия общего приводного вала.
Формула изобретения
Грузоперемещающее устройство, содержащее основание, грузонесущий элемент, установленный в вертикешьных направляющих с возможностью пермещения в них и связанный с двумя приводными барабанами посредством гибких тяговых органов, огибающих направляющие элементы, установленные на основании, при этом концы каждого гибкого тягового элемента на разных уровнях по высоте, о тличающееся тем, что с цел повышения надежности работы, точки крепления каждого гибкого тягового органа размещены на противоположных боковых сторонах грузонесущего элемента, причем каждый гибкий тяговый орган снабжен дополнительным направляющим элементом, закрепленным на основании.
Источники информации, принятые во внимание при экспертизе
1. Патент Великобритании № 13900 кл. В 7 Н, опублик. 1975.
//}f/////.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический ленточный конвейер | 1980 |
|
SU908672A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| КОВШОВЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР С УВЕЛИЧЕННОЙ ВМЕСТИМОСТЬЮ КОВШЕЙ | 2011 |
|
RU2478550C1 |
| Конвейерный подъемник | 1987 |
|
SU1512903A1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2721067C1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| Устройство для замены гибкого тягового органа подъемно-транспортной машины | 1989 |
|
SU1696380A1 |
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР | 1996 |
|
RU2132813C1 |
7/ 2
Г2/ /
2 O. W
rf
9 /0
muiL
7 У//У//Л ////у
