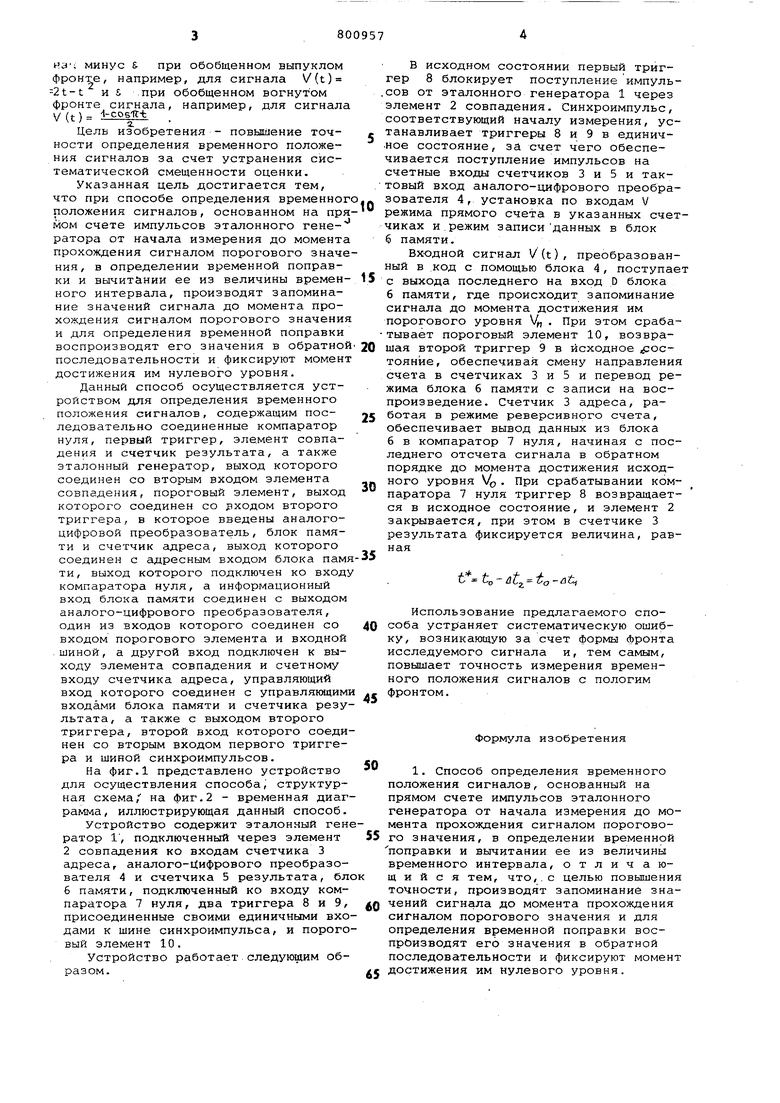
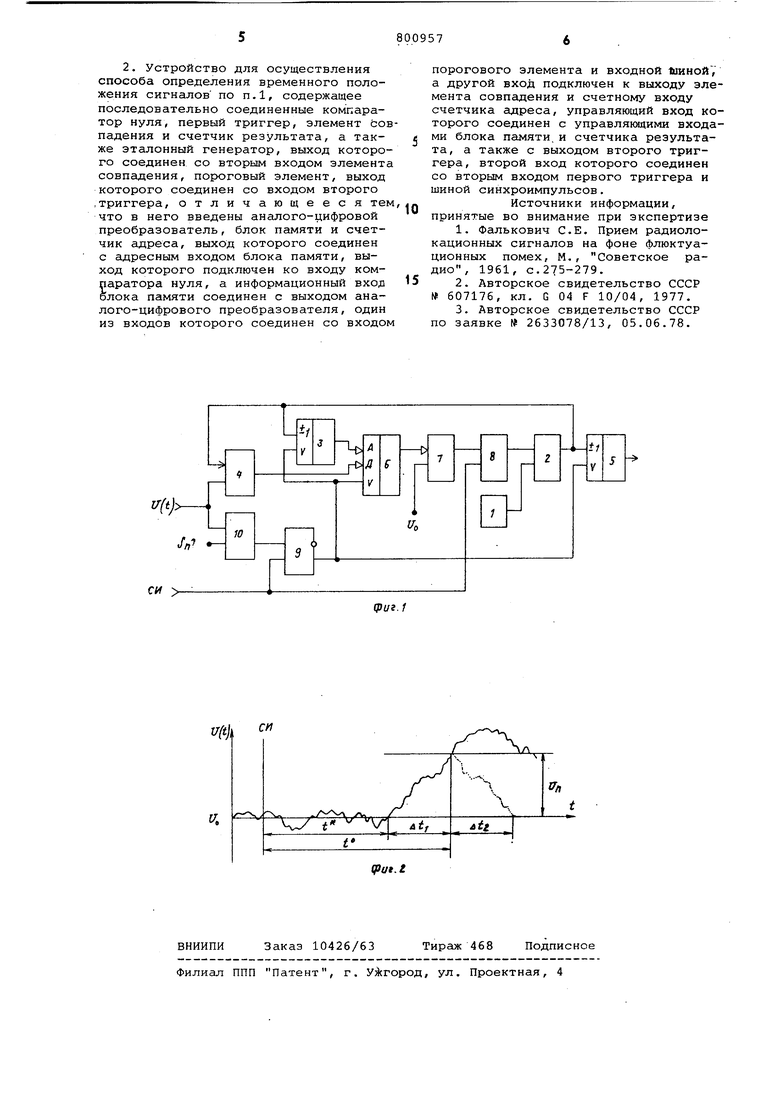
на; минус при обобщенном выпуклом фронте, например, для сигнала V(t) -2t-t и при обобщенном вогнутом фронте сигнала, например, для сигнала V (t) ii 2§3Lfc Цель изобретения - повышение точности определения временного положения сигналов за счет устранения систематической смещенности оценки. Указанная цель достигается тем, что при способе определения временног положения сигналов, основанном на пря мом счете импульсов эталонного генератора от начала измерения до момента прохождения сигналом порогового значе ния, в определении временной поправки и вычитании ее из величины времен ного интервала, производят запоминание значений сигнала до момента прохождения сигналом порогового значени и для определения временной поправки воспроизводят его значения в обратно последовательности и фиксируют момен достижения им нулевого уровня. Данный способ осуществляется устройством для определения временного положения сигналов, содержащим последовательно соединенные компаратор нуля, первый триггер, элемент совпадения и счетчик результата, а также эталонный генератор, выход которого соединен со вторым входом элемента совпадения, пороговый элемент, выход которого соединен со уходом второго триггера, в которое введены аналогоцифровой преобразователь, блок памяти и счетчик адреса, выход которого соединен с адресным входом блока пам ти, выход которого подключен ко вход компаратора нуля, а информационный вход блока памяти соединен с выходом аналого-цифрового преобразователя, один из входов которого соединен со входом порогового элемента и входной шиной, а другой вход подключен к выходу элемента совпадения и счетному входу счетчика адреса, управляющий вход которого соединен с управляющим входами блока памяти и счетчика резу льтата, а также с выходом второго триггера, второй вход которого соеди нен со вторым входом первого триггера и шиной синхроимпульсов. На фиг.1 представлено устройство для осуществления способа, структурная схема, на фиг. 2 - временная диаг рамма, иллюстрирующая данный способ. Устройство содержит эталонный ген ратор 1, подключенный через элемент 2 совпадения ко входам счетчика 3 адреса, аналого-цифрового преобразователя 4 и счетчика 5 результата, бл б памяти, подключенный ко входу компаратора 7 нуля, два триггера 8 и 9 присоединенные своими единичными вхо дами к шине синхроимпульса, и порого вый элемент 10. Устройство работает следующим образом. в исходном состоянии первый триггер 8 блокирует поступление импульсов от эталонного генератора 1 через элемент 2 совпадения. Синхроимпульс, соответствующий началу измерения, устанавливает триггеры 8 и 9 в единичное состояние, за счет чего обеспечивается поступление импульсов на счетные входы счетчиков 3 и 5 и тактовый вход аналого-цифрового преобразователя 4, установка по входам V режима прямого счета в указанных счетчиках и режим записиданных в блок 6 памяти. Входной сигнал V(t), преобразованный в код с помощью блока 4, поступает с выхода последнего на вход D блока 6 памяти, где происходит запоминание сигнала до момента достижения им порогового уровня VH . При этом срабатывает пороговый элемент 10, возвращая второй триггер 9 в исходное ; ;остояние, обеспечивая смену направления счета в счетчиках 3 и 5 и перевод режима блока 6 памяти с записи на воспроизведение. Счетчик 3 адреса, работая в режиме реверсивного счета, обеспечивает вывод данных из блока 6 в компаратор 7 нуля, начиная с последнего отсчета сигнала в обратном порядке до момента достижения исходного уровня /о . При срабатывании компаратора 7 нуля триггер 8 возвраидается в исходное состояние, и элемент 2 закрывается, при этом в счетчике 3 результата фиксируется величина, равнаяt to-at to-au Использование предлагаемого способа устраняет систематическую ошибку, возникающую за счет формы фронта исследуемого сигнала и, тем самым, повышает точность измерения временного положения сигналов с пологим фронтом. Формула изобретения 1. Способ определения временного положения сигналов, основанный на прямом счете импульсов эталонного генератора от начала измерения до момента прохождения сигналом порогового значения, в определении временной поправки и вычитании ее из величины временного интервала, отличающийся тем, что,.с целью повышения точности, производят запоминание значений сигнала до момента прохождения сигналом порогового значения и для определения временной поправки воспроизводят его значения в обратной последовательности и фиксируют момент достижения им нулевого уровня.
2. Устройство для осуществления способа определения временного положения сигналов по п.1, содержащее последовательно соединенные компаратор нуля, первый триггер, элемент совпадения и счетчик результата, а также эталонный генератор, выход которого соединен со вторым входом элемента совпадения, пороговый элемент, выход которого соединен со входом второго .триггера, отличающееся тем что в него введены аналого-цифровой преобразователь, блок памяти и счетчик адреса, выход которого соединен с адресным входом блока памяти, выход которого подключен ко входу компаратора нуля, а информационный вхор блока памяти соединен с выходом аналого-цифрового преобразователя, один из входов которого соединен со входом
порогового элемента и входной 1ииной7 а другой вход подключен к выходу элемента совпадения и счетному входу счетчика адреса, управляющий вход которого соединен с управляющими входами блока памяти, и счетчика результата, а также с выходом второго триггера, второй вход которого соединен со вторым входом первого триггера и шиной синхроимпульсов.
Источники информации, принятые во внимание при экспертизе
1.Фалькович С.Е. Прием радиолокационных сигналов на фоне флюктуационных помех, М., Советское радио, 1961, с.275-279.
5
2.Авторское свидетельство СССР № 607176, кл. G 04 F 10/04, 1977.
3.Авторское свидетельство СССР по заявке № 2633078/13, 05.06.78.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство диагностирования электронной аппаратуры | 1990 |
|
SU1837244A1 |
| Многоканальное устройство ввода аналоговой информации | 1987 |
|
SU1418726A1 |
| Устройство для диагностики стационарных стохастических объектов | 1982 |
|
SU1084746A1 |
| Устройство для идентификации аналоговых сигналов | 1991 |
|
SU1789985A1 |
| Аналого-цифровой преобразователь с коррекцией погрешности | 1988 |
|
SU1688473A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для автоматического контроля больших интегральных схем | 1986 |
|
SU1529220A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1231610A1 |
| Измеритель временных интервалов медико-биологических сигналов | 1978 |
|
SU745499A1 |
| Аппаратура для картирования грунтов дна водоема | 1984 |
|
SU1188687A1 |
СИ
(h
