(54) УГРАВЛЯКдаЩЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Управляющее устройство | 1980 |
|
SU959039A1 |
| Устройство для автоматического нанесения покрытий | 1985 |
|
SU1297925A1 |
| Автоматическое окрасочное устройство | 1981 |
|
SU1030034A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Устройство управления экскаватором | 1987 |
|
SU1444482A1 |
| Устройство для управления шахтной вентиляционной дверью | 1985 |
|
SU1448075A1 |
| Система двурукого управления пневмоприводом | 1990 |
|
SU1732113A1 |
| Пневмопривод | 1979 |
|
SU877156A1 |
| ПНЕВМАТИЧЕСКИЙ НАСОС СУДОВОЙ СИСТЕМЫ ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2602471C2 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 2008 |
|
RU2379556C1 |
1
Изобретение ртйосится к автоматическому управлению и может быть применено для нанесения лакокрасочных покрытий.
Известно управляющее устройство в котором для автоматического , управления положением распылителя используются считывающие и логические устройства и резисторный мост, в плечи которого подключаются переменный резистор с сопротивлением, соответствующим габариту изделия, и переменный резистор с сопротивлением, соответствующим амплитуде перемещения распылителей 1.
Однако это устройство выполняется на электрических элементах обычного исполнения, что влечет за собой опасности взрыва паров растворителя, всле1цствие чего использоваиие подобных устройств при окраске изделий по правилам пожарной безопасности исключается.
Известно также устройство, в котором с помощью датчика (фото- реле), установленного за пределами камеры окраски, сигнал о наличии изделия с выдержкой по времени, реализованный на элементах электротехники в обычном исполнении, передается на распылитель, командуя началом и окончанием распыления. Это устройство не решает проблему полной автоматизации процесса окраски и также не исключает пожаро- и взрывоопасность 2 .|
Наиболее близким к предлагаемому является управляющее устройство, содержащее фотодатчики, соединенные через электропневмопреобразователи и элементы ИЛИ с органами ручного управления и четырьмя узлами задержки, первые три из которых через элементы НЕ и пятилинейные
распределители соединены с полостями мембранного пневмогидропреобразователя, выходы которого соединены с полостями гидроцилиндра 31.
Это устройство не обеспечивает
необходимую точность позиционирования в промежуточных положениях распылителей вследствие сжимаемости воздуха, а также в связи с отсутствием жестких упоров.
цель изобретения -г повышение точности позиционирования распылителей в промежуточных положениях.
Поставленная цель достигается тем, что устройство содержит дополнительные элементы НЕ,,клапаны последовательности хода поршня гидроцилиндра и элемент ИЛИ, и нормально закрытый клапан схвата, соединенный через последовательно включенные дополнительные элементы НЕ с выходом первого узла задержки, причем управляющий вход первого дополнительного эле лента НЕ через элемент ИЛИ соединен с выходами клапанов последовательности, входы которых подключены к полостям мем. бранного пневмогидропреобразователя . .
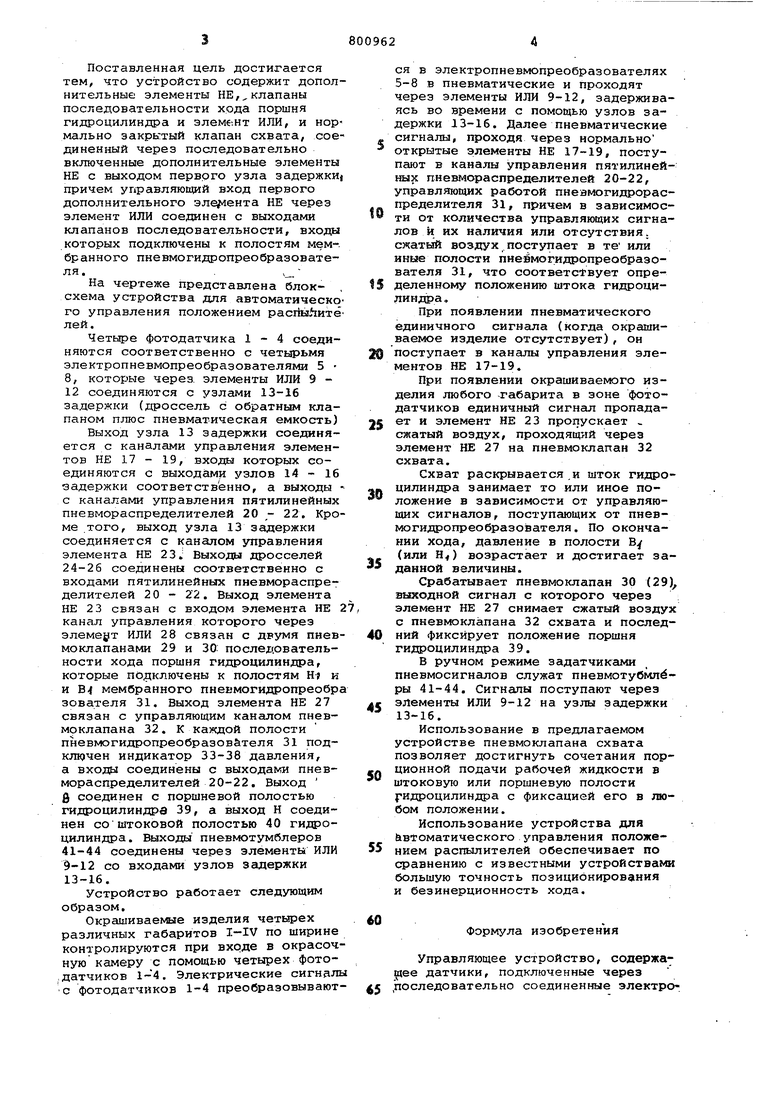
На чертеже представлена блоксхема устройства для автоматическо го управления положением расйыйитё лей.
Четыре фотодатчика 1 4 соединяются соответственно с четырьмя электропневмопреобразователялш 5 8, которые через, элементы ИЛИ 9 12 соединяются с узлами 13-16 задержки (дроссель с обратным клапаном плюс пневматическая емкость)
Выход узла 13 задержки соединяется с каналами управления элементов НЕ 17 - 19, входы которых соединяются с выходами узлов 14 - 16 задержки соответственно, а выходы с каналами управления пятилинейных пневмораспределителей 20 - 22. Кроме того, выход узла 13 задержки соединяется с каналом управления элемента НЕ 23, Выходы дросселей 24-26 соединены соответственно с входами пятилинейных пневмораспределителей 20 - 22. Выход элемента НЕ 23 связан с входом элемента НЕ 2 канал управления которого через элемеут ИЛИ 28 связан с двумя пневмоклапанами 29 и 30 последовательности хода поршня гидроцилиндра, которые подключены к полостям H-j и и В мембранного пневмогидропреобра зователя 31. Выход элемента НЕ 27 связан с управляющим каналом пневмрклапана 32. К каждой полости пневмогидропреобразовйтеля 31 подключен индикатор 33-38 давления, а входы соединены с выходают пневмораспределителей 20-22. Выход g соединен с поршневой полостью гидроцилиндра 39, а выход Н соединен со штоковой полостью 40 гидроцилиндра. Выходы пневмотумблеров 41-44 соединены через элементы ИЛИ 5-12 со входами узлов задержки 13-16.
Устройство работает следующим образом.
Окрашиваемые изделия четырех различных габаритов I-IV по ширине контролируются при входе в окрасочную камеру с помощью четырех фото.датчиков 1-4. Электрические сигналы с фотодатчиков 1-4 преобразовываются в электропневмопреобразователях 5-8 в пневматические и проходят через элементы ИЛИ 9-12, задерживаясь во времени с помощью узлов задержки 13-16. Далее пневматические сигналы, проходя через нормально открытые 31лементы НЕ 17-19, поступают в каналы управления пятилинейных пневмораспределителей 20-22, управляющих работой пневмогидрорасгфеделителя 31, причем в зависимости от количества управляющих сигналов и их наличия или отсутствия, сжатый воздух поступает в те или иные полости пнеймогидропреобразователя 31, что соответствует определенному положению штока гидроцилиндра.
При появлении пневматического единичного сигнала (когда окрашиваемое изделие отсутствует), он поступает в каналы управления элементов НЕ 17-19.
При появлении окрашиваемого изделия любого габарита в зоне фотодатчиков единичный сигнал пропадает и элемент НЕ 23 пропускает сжатый воздух, проходящий через элемент НЕ 27 на пневмоклапан 32 схвата.
Схват раскрывается,и шток гидроцилиндра занимает то или иное положение в зависимости от управляющих сигналов, поступающих от пневмогидропреобразователя. По окончании хода, давление в полости В/ (или Н) возрастает и достигает заданной величины.
Срабатывает пневмоклапан 30 (29) выходной сигнал с которого через элемент НЕ 27 снимает сжатый воздух с пневмоклапана 32 схвата и последний фиксирует положение поршня гидроцилиндра 39.
В ручном режиме задатчиками пневмосигналов служат пневмотубмлёры 41-44. Сигналы поступают через элементы ИЛИ 9-12 на узлы задержки 13-16.
Использование в предлагаемом устройстве пневмоклапана схвата позволяет достигнуть сочетания порционной подачи рабочей жидкости в штоковую или поршневую полости {идроцилиндра с фиксацией его в любом положении.
Использование устройства для автоматического управления положением распылителей обеспечивает по сравнению с известными устройствами большую точность позиционирования и безинерционность хода.
Формула изобретения
Управляющее устройство, содержавшее датчики, подключенные через .последовательно соединенные электро
