(54) АСИНХРОННЫЙ ЭЛЕКТРОЛРИВОЛ ПОДЪЕМНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2277747C1 |
| Двухдвигательный электропривод переменного тока | 1989 |
|
SU1690166A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Двухдвигательный электропривод переменного тока | 1988 |
|
SU1577045A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Электропривод переменного тока | 1986 |
|
SU1387159A1 |
| Устройство для торможения асинхронного электродвигателя с самовозбуждением | 1982 |
|
SU1092682A1 |
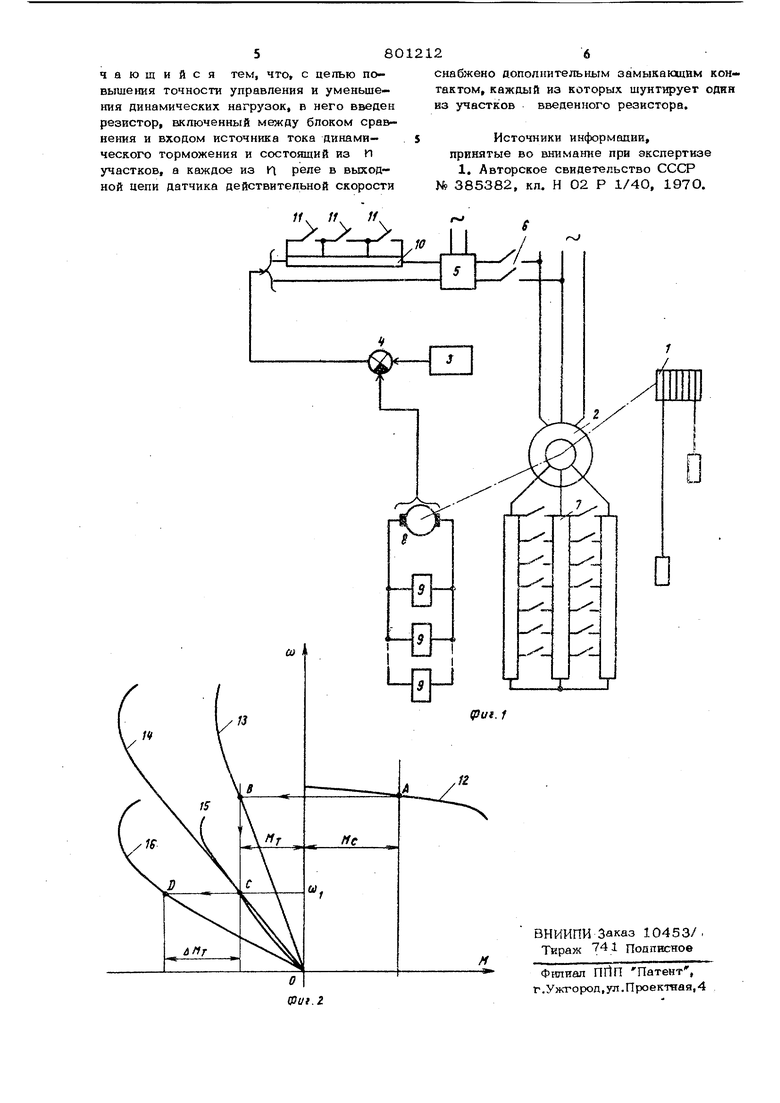
Изобретение относится к электроприводам, а именно к автоматическому управлению приводом при динамическом торможеиии асинхронного двигателя. По основному BBTi св. № 385382 известен асинхронный электропривод подъемной машины, содержащий подъемную машину, соединенную с асинхронным двигате«л, лем, соединенные последовательно программное устройство, узел сравнения и регулируемый источник тока динамического торможения, к выходу которого подсоединена статорная обмотка двигателя, набор резисторов, включенных в цепь ротора дви гателя, датчик действительной скорости, к выходу которого подключены второй вход узла сравнения и И реле для управления роторными контакторами в функции скорости, а также электрические цепи роторньк контакторов l. Недостатком устройства является то, что при переключении ступеней роторнъис резисторов происходят резкие колебания тормозного момента, которые приводят К большим динамическим нагрузкам в механических узлах установки, например в валопроводе подъемной машины и в канатах. Колебания тормозного момента вызывают колебания скорости, которые устраняются только после обработки появившейся ошибки по скорости системой управления регулируемым источником тока, действук щей по принципу отклонения действительной скорости от заданной. Вследствие этого ухудшается точность управления. Цель устройства - повышение точности управления и уменьшение динамических нагрузок за счет снижения колебаний тормозного момента. Указанная цепь Достигается тем, что в основной асинхронный электропривод одъемной машины введен резистор, включенный между блоком сравнения и входом источника тока динамического торможения и состоящий из И участков, а каждое из П реле в выходной цепи датчика действиельной скорости снабжено дополнительным замыкающим контактом, каждый из которых шунтирует один из участков введенного резистора. На фиг, 1 изображена схема электропривода; на фиг. 2 - механические характеристики асинхронного овигателя. Асинхронный электропривод подъемной машины содержит подъемную машину 1, соединенную с асинхронным двигателем 2, соединенные последовательно программное устройство 3, узел 4 сравнения и регулируемый источник 5 тока динамического торможения. К выходу регулируемого источника 5 тойа подключена через контакты 6 контактора динамического торможения статорная обмотка двигателя 2. К роторной обмотке двигателя 2 подключен набор резисторов 7. С ротором двигателя 2 связан датчик 8 действительной скорос ти, к выходу которого подключен второй вход узла 4 сравнения, и И реле 8 для управления роторными контакторами и функции скорости. Во входную цепь регулируемого источника 5 тока динамического торможения последовательно включен резистор 10, состоящий из И участков, каждый из которых зашунтирован соответствующим замыкающим контактом 11 репе 9. Устройство работает следующим образом. В исходном состоянии асинхронный дви гатель 2 работает на естественной харак теристике, которая соответствует точке А на характеристике 12 {фиг. 2). Реле 9 находится во включенном состоянии, контакты 11 реле 9 замкнуты. В момент начала торможения контакты 6 контактора динамического торможения подключают статорную обмотку асинхронного двигателя 2 к BbixofQT регулируемого источника 5 тока динамического торможения. В роторную цепь двигателя 2 вводится с помоифю контактов роторных контакторов резистор, сопротивление которого рассчитано из условий неопрокидывания двигателя 2, Рабочая точка двигателя перемещается в точку В на характеристике 13 динамического торможения (фиг. 2). В процессе торможения программное устройство 3 вырабатывает сигнал пропорциональный заданной скорости, который сра нивается в узле 4 срнвнетя с сигналом, снимаемым с выхода датчика 8 действительной скорости. Сигнал рассогласования с выхода узла 4 сравнения поступает на регулируемый источник 5 тока динами ческого торможения, в результате чего в статорной обмотке двигателя 2 протекает ток динамического торможения такой вел чины, что на роторе двигателя 2 возникает требуемый тормозной момент М«,. При этом скорость двигателя снижается в соответствии с программой. По мере сниже- ния скорости по характеристике 13 тормозной момент снижается, однако в силу действия обратной связи по скорости увеличивается ток динамического торможени.я, вследствие чего изменяется характеристика торможения, а величина тормозного момента остается постоянной. Рабочая точка перемещается из точки В на характеристике 13, соответствующей наименьшему току динамического торможения, в точку С на характеристике 14, соответ- ствующей наибольшему току динамического торможения. При скорости двигателя ОЛ отключается одно реле 9, в результате чего роторные контакторы переключа- ют резисторы в цепи ротора двигателя на другую ступень. Одновременно с этим размыкается контакт 11 отключившегося реле 9, вводя во входную цепь регулируемого источника тока соответствующий участок резистора 10. Таким образом, уменьшение сопротивления в цепи ротора двигателя 2 происходит одновременно с уменьшением тока динамического торможения на величину, которая определяется сопротивлением введенного участка резистора Ю. При этом колебания тормозного момента практически будут отсутствовать. Это соответствует переходу двигателя с характеристики 14 на характеристику 15 так, что рабочая точка С в момент перехода практически не изменяется. При переключении остальных ступеней роторного резистора работа предлагаемого устройства аналогична. Для сравнения приведена характеристика 16 (фиг. 2), соответствующая максимальному току динамического торможения на предыдущей ступени и новому значению роторного резистора. При отсутствии ступенчатого изменения тока динами- . ческого торможения в момент переключения роторного.резистора рабочая точ- ка двигателя перемещается из точки С в точку D .Вследствие этого возникает приращение тормозного момента (X М что ухудшает динамику режима торможения и уменьшает точность выполнения заданной программы замедления. -Формула изобретения Асинхронный электропривод подъемной машины по авт. св. N 385382, о т л и
